со
со
со
05
H;t()6)e reiino (Лшн итс Я к i ико (;; :-к ком MaiiiHiiocTpotMiHK) II касаеггя и. юсконя (Л. и, И1,1х машин.
Целью изопретеиия ян.1яегся ii()ii iiiie- иие 11р1)изи)лите. 1Ы1()С1 и ycrtxHic i ва.
Па ijinr, 1 показано i|H-.a. iai аемос yi i- p(jHCTEi() i;pn 1И й гра. 11)Н)1 рас ипло спии Прутков. ВИЯ ciK pe. ui; на (j). 2 lo Ж1 вил сбоку; .ча фиг . .3ю же, вид 1, Ве) ia
()иг. 4уст К1Й1 Вп в Ha ia.ibiibiii мо.меп
11ерек.1К)чения, вил ве|).у, на (|);ir. ii(ia вое ио.и)же)1ие у()йства в пача.чьпый момент иеси ключеиия; на (|)иг. () же,
иосле переключения; на фи1 7 ва)иаи1 вы- ио. шения устронетва е нолвижи111м ш гево- дом; иа фнг. Мвари; нт BijiHo.тения
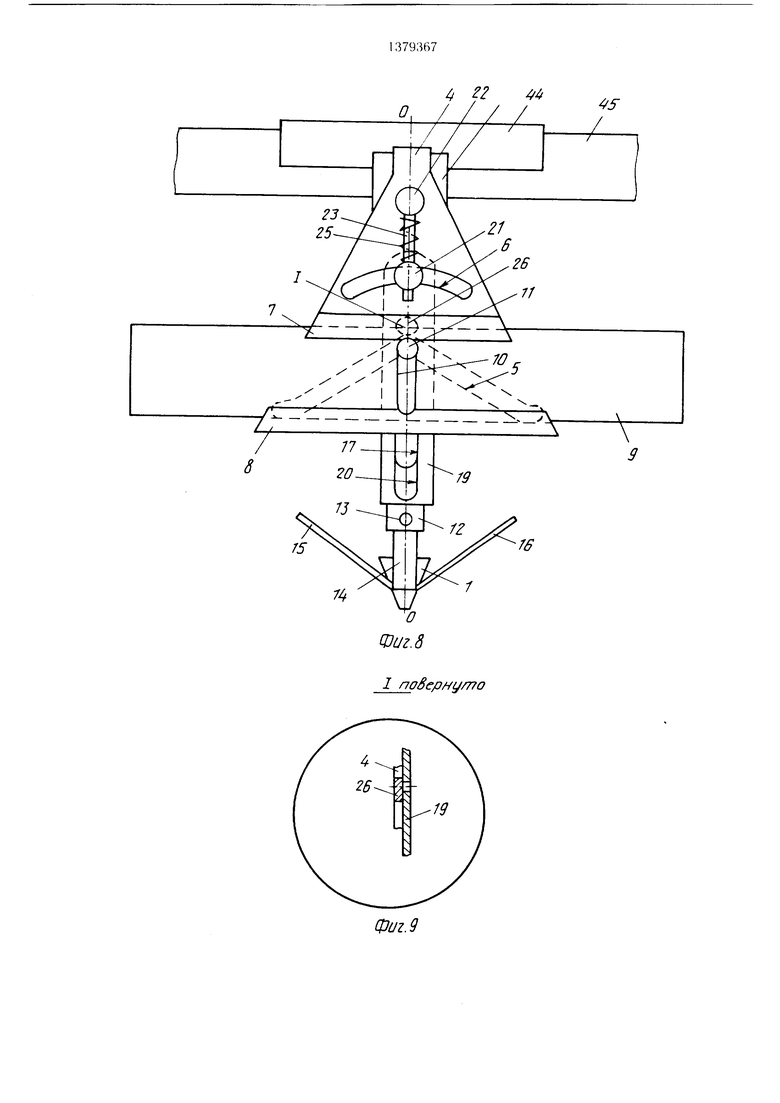
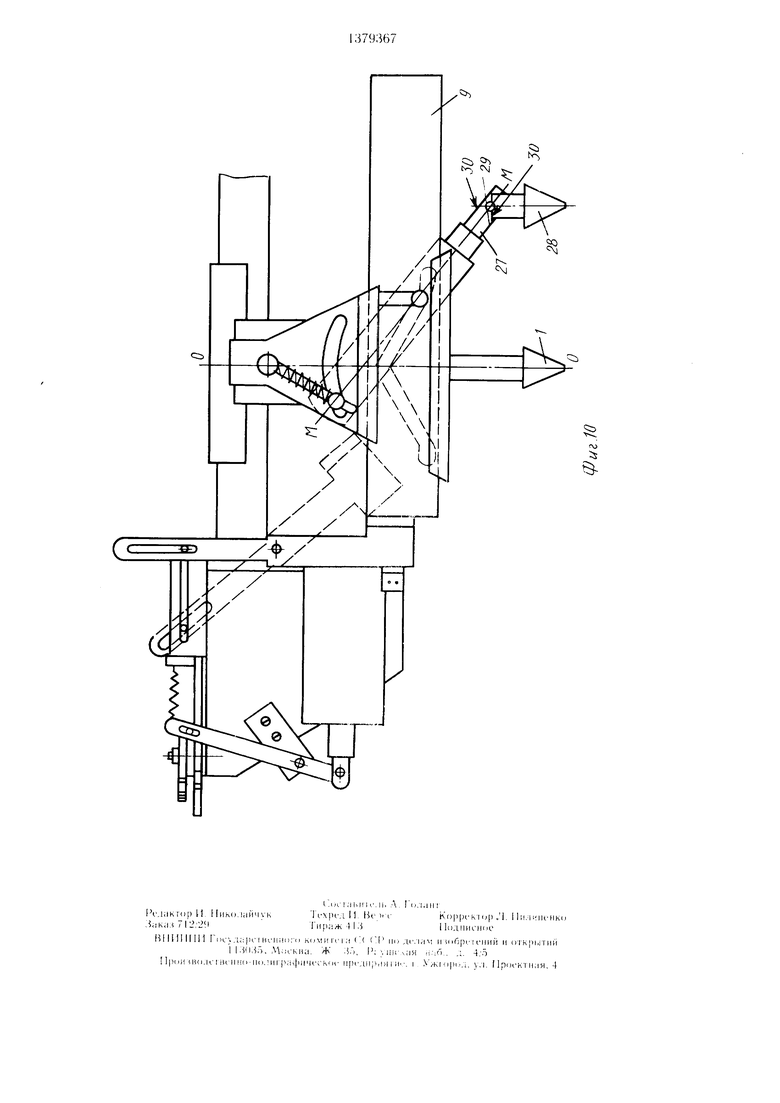
устройства д.чя одной ()11 cHcreMiii при иейтра. 1ьиом 11(), |()жеинн п)уткив; на фиг. I на 4)иг. S; на (. К) но- ле)же11ие устройства на млиноно.южном ог раничигсме .хола иигеволов.
Устройство СО. К рЖИТ П1Ч1ОДВИЖН1 1Й 1НТевод I, на корпусе 1 которого нри номоши кронн1тейна 3 жестко установлена пластина 4 с ду1Ч)()б|)а;и1Ым iiaioM 5 и .чопо. шительным дуг()оГ)ра;м1Ым иа.((.)м в.
Па вне1иией стороне нластини 4 установлены нан)авляк)ни1е 7 и 8. .меж.чу ко горымн подвижно у(Л анов.:11Л1а iinaHia 9, имеющая на: И), соответствующий высок пача Г) ii.:iacTHHbi 4. В на i Г) иластины 4 и в иа., Н) И1тан1и 9 в.ходит oci, II подвижного ко)и са 12. ila конце нос.телнего установлено с во.чможностью ре1л,1ирования ноне() о ноложения относительно оси симметрии .ic ва Р Р ман1ины iiocpe.u TfjoM 13 и пружин) (не нока:1ана) ..)1нес уст))йств(1 14, содержащее HpyiKM 13 i Mi, отогнутые под чг.пом у - ГЛ1М1 Т 1И)1 Л , подвижною ко)нуеа Г2 с ючг пкжно- стью оттягивания исмчмь Т |)|;к 1гажа
Подвижный К(Ч)11ус 12содержи-| ; К1 оч11ой наз 17 .1 1Я иро.хождения оси 11 и нпл .leiic i- вием вин га 18 име1.л возможное ь иереме- нюния в ианрав,.х гвена 10, спле11.Аа Hiei O cKB()4Hnii iia.i 20 л .и гглохо/кдсния оси 11. Звено 9 поворотно с(к лин н о ; ос г; 21, которая нро. чсре .чочо.. мшчм: H,iii Ha;i () нластины 4.
Л. 1Я си. ювогс ам1,1кания iBOfia 1. и;; 11,. 1астине 4 но оси сцммет)ии .) () ,д- 11од|5ижногс ииге;1Г|Да I уст ановлс-на аово ютная ось 22, коглраи содс||ЖИ| намрав ляющук) 23, 11роти ;о1кг;ожн1 П1 конец нос .педней своГюд.чг (:хол1(т и (гг.: 1)стие 24 оси 21. Па нан)ав.1як1Н1ей 23 между осями 22 и 21 установ;|ена нруж;ина 23 сжатии.
UeHi ioM BfiameHHH чвена 19 ян,: , ось 26 вращения, .-KecrKt; установ.и нная nii внутренней стороне нластиш, 4 ио cii%i метрии О С) неиодвижiioro Hiii 1 ио.ча 1 laK, что ось 2f) вхоли 1 и сквочпой чач 20 вена 19 и но высоте соответ1 твует Г 1Л;цине сквоч- НО1Ч) iia:- a 20 чвена 9, Па нротивсчтежа- щей стороне oi оси симмегрии К К на
ил11стиие 4 смонтирован ан. логичшлй мсха- ничм.
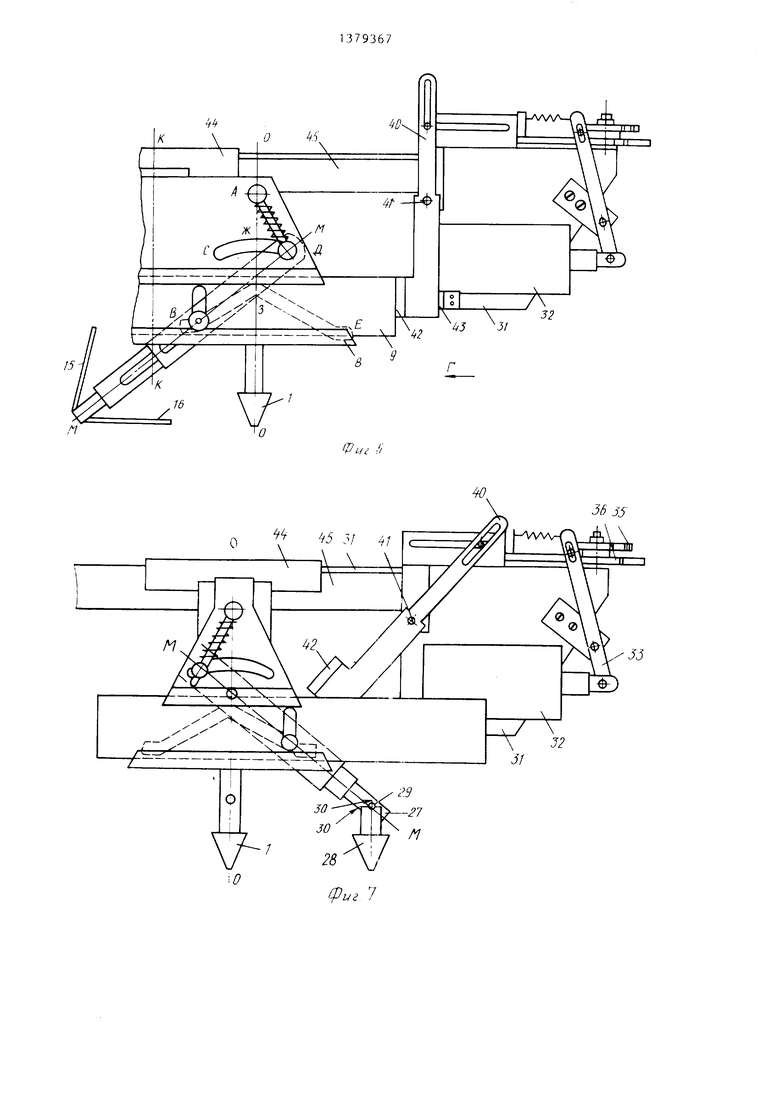
Для одновременного нрокладывания двух нит1. й на подвижном корпусе 12 вместо амор- TH.«;jrvK)Hiero устройства 14 устанавливают KpuHiHieiiH 27, нижняя часть когорого вы- ||о,1нена ступенчатой на голшину нодви) ;- ного ни|евода 28, н(.движно установленного на оси 29 качании в нижней части крон- jHreiiHa 27. В месте (е Н хода ступеней сту- нен1 (ынолнена со скосами 30, являющимися ограничителями поворота подвижного н11Г вода 28 при егч) качании.
Д,1Я и;шенения ноложения подвижного Kcjpnyca 12 с прутка.ми 15 и 16 или с подвиж- j Hi)iM нитеводом 28 на ограничителях 31 хода нитеводителя смонтирован механизм про- |()аммн()|Ч1 переключения нрутков 15 и 16, содержа ци11 электромагнит 32, воздействующий рыча1 ом 33, собачкой 34 на храновое Ko, ieco 35, на оси которого установлен и вмесге с ним вращается п 1ограммный диск 36, который через систему рычагов 37-39 гвует на рычаг 40 нереклн;чения, установленный на 01Л1 41 вращения и в нижней част вынолнс iiiibisi в виде унора 42.
(1Л поворота ()ычага 40 Г1е)еключения О1 рани:чива( TI я до вер rHKa,ibH(jr(.) рабочего но.|(Ж1 11ия о раничителе.м 43, жесткс; уета- Hoii И иным иа () раничи геле 31 .хода нитеводов . циможностью контактирования с уно- роч 42.
llci.iiyiHKa 44 ненод;1ижного нитевода I у . ганои.тена на ни геводтп ельном ре,.1ьсе 45 с г.о но/кнос гью н рем1чцення посредством и )в(|дкового на. 1Ь)Ца 4(i.
//(Л 1 пи тно дли н|/окладь 1)а11ия нитей не : iii/к. почает возможности установки двух и 6i.i, iee иенодри1жных 11ите одов с подвижны ми корнус.ами с о 1ляжными нрутками и, 1и с подвижными нитеводами.
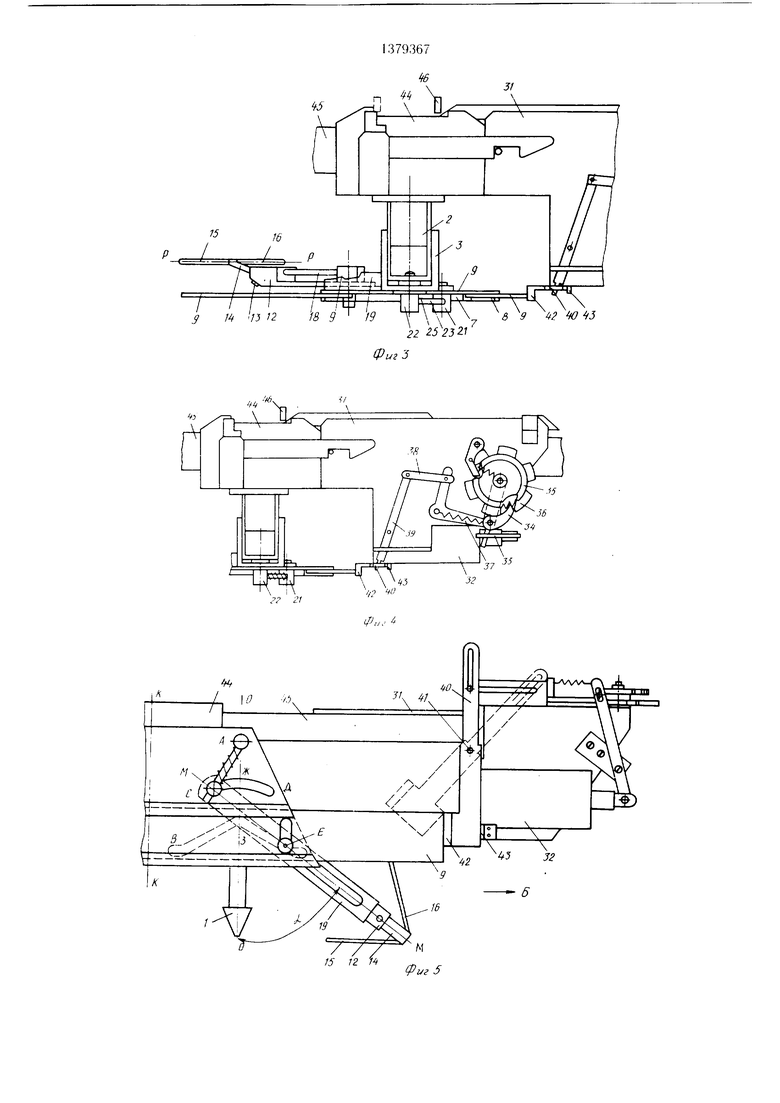
При движении вяж :11ей каре тки вмес- гг )л jyiHKcni 44 неподвижного нитевод;; i, иа11)имер, с.чева }iaiipaBO нрутки 15 и :i )),.1а1 аютси вне|)еди )м1()движно о м 1г;-иола ;и 1Я огтягивания нете. п, трикота- ,..а ;фиг. 5) прутком 15. Направление :|и.. |,м Б (фи1. 5) cooTiU 1 сгвуе .мо.менту . )сг.., :.1|)чения нолг. Жения (реверса) подвиж- ic:ii KOjMUca 12. Па фи1 1, 2 и 8 показа- Н Icp ..uiec) нсйт)а.1 ное но, 1ожение подвиж- i;oio корпуса 12 при не()ек:1ючении, на (ji.il. 3 и () положение нос.че не)еключе- н.ия, iipvTOK И) .1 рабочем 1н, ожении, нруток I Г, в нерабочем положении. Механизм П|)О- i .; а.1Ы1.иния нити начинас Т .чвижеиие сира- а. |и.. ;с;чо по и;П1равлению с грелки Г (фи1 . (}.
рч исрек.чючении нггантл 9 находит на vii. p 42, что ;1иводит к ее неремепюнин) в 1ил1)аи.чяк)1ии. 7 и 8 н,.частн :ы 4. При даль- нейн ом движении ка)етки шчунта 9 воз- jieiiciL.yeT назом 10 на ось 1 под жжного корпуса 12. П)и .м ось 1 неременгается ( lac. 5 нластиь 1 4 и но назу 10 н;танги 9.
Ось 11, перемещаяс) по сквозным пазам 17 и 20, воздсйствуег на полнижный корпус 12, заставляя его перемещаться в направляющих звена 19, и одновременно перемещает звено 19 вокруг осн 26 враще ния (фиг. 8). При вращении звена 19 ось 21 перемещается вокруг своей оси и по дополнительному дугообразному пазу 6 в панрав.че- нии, противоположном перемещению оси 11 паза 5. Ось 21, перемещаясь но дополнительному дугообразному пазу 6, отклоняет нанравляк)Н1ую 23 в сторону своего перемещения, вращая ось 22. При неремещении оси 21 из крайней точки (точки С и при прохождении точки Ж, лежащей посередине дополнительного дугообразного паза 6, на- прав.тяюи1.ая 23 перемещается в отверстии 24 оси 21, а пружина 25 сжимается и при дальнейшем движении оси 21 к нротиво,1ежа- щей крайней точке Л пружина 25 разжимается и замыкает (фиксирует) положение звена 19 (фиг. 5 и 6).
Подвижный корпус 12 перемещается в направляющих звена 19 так, что его ось сим.метрии М образует уг ол а. с осью симметрии О -О не11одвиж}{ог о нитевода 1. при котором нруток 16 устанавливается в рабочее псхпожение для ()ття1ивания петель трикотажа. При этом положепии противо- :1ежащие точки В и Е соответствующего паза 5 и дополнительного дуюобразпого паза 6 устанавливаются на оси симметрии - М подвижног о корпуса 12.
При нейтральном но. южении оттяжных прутков 15 и 16 ось симметрии Л .М подвижною корпуса 12 совмещается с осью симметрии О О негюдвижно() нитевода 1, а оси 21 и 22 соответственно паза 5 и доно.тните.тьного ду| ообразно() паза ( устанавливаются на оси симмет)ии О (), по центру соответствующих пазов 5 и 6 так, что оси 11,21 и 22 расположены на оси симметрии О О.
Для изменения положения оттяжных прутков 15 и 16 включается электромагнит 32 механизма 1грог)аммно1о переключения, который через р)1чаг 33, собачку 34, храповое колесо 35 приводит )о вращепие прО раммпый диск 36, который через систему рычагов 37-- 39 воздейсгвует на pi,i4ai 40 переключения. Последни) занимаег одно из двух возможных по,тожений, вращаяс1 вокруг оси 41. Вертикальное рабочее по.ю- женпе фиксируется ограничите.юм 43, при KOTO|KjM упор 42 устанавливается на пути движения 9 для ее перемещения в направ,тяюни1х 7 к 8 п, 1астии1 1 4.
Уг.ловое иоложсние piiinai a 40 нерек.тюче- ния устанавливают (фи1 5 и 9, пунктирная линия), когда упор 42 расположен выше направ,1ения движеиия щтанги 1. Это необходимо, например, для расно. южения подвижного нитевода 28 за неподвижным нитеводом 1 д,я смены по.тожепи нрок. 1ады5
0
5
0
5
0
5
0
5
ваемых нитей при ооразовании IIOBOIO пе- те.1Ь){ого ряда трикотажа (фиг. 7).
При обратном движении вяжхпам каретки, снрава на,1ево, 11о одковый iia,ien 4(i входи I в запепление с по, 1з щко11 44 д,1я ее перемещения B.io.ib нитеводительно о рельса 45 (фиг. 3 и 6).
1ерек.1ючение по.южений устройсгва д.чя прокладывания нитей осуществляегся в зависимости от положения pi)i4aia 40 11е 1екл1 |- чения механизма программною переключения.
Папример, нри д.вижении карс1ки c.iena направо (фиг. 5) под де1и твием рычага 40 переключения происходит псреключепие прутков 15 и 16 и,1и 11ОДВИЖНО1Ч) нигевода 28.
Подвижный нитевод 28 устанавливают замен(И1 амортизирующего устройства 14 кроит гейном 27. При нчнмнч подвижного корпуса 12 нодвижный нитевод 28 нод действием натяжения нити и Г рав1ггационно11 силы устанавливайся в горизонта, но- ложение, вран1аясь вокруг оси 29, у1Ч),т вращения ограничивае1ся ограничпте.тями поворога, вьп1о,1ненными в виде скосов 30.
Регу,тирование поперечного по.южен и я
ОТГЯЖН1 1Х прутков 15 и 16 или ИОДВИЖН01()
нитевода 28 относнте.:|Ь}1о оси симметрии зева машины Р Р осуществляют посредством винта 13 и пружины (не ноказана).
Для сохранения положения подвижного Kopnvca 12 (фиг. 7) д,1Я обратного движения справа палево рычаг 4(1 переключения занимает угловое положение под действпем .(ма программного перек,чючения. медствие этою 11ерек,чючеппя пе )исхо- .UIT и при ()б)атиом движепии каре1ки справа палево по/южение нодвижиого Kopriyca 12 сохраняется.
Па противопо,то/кном О1 |)а11ичите;1е 31 хода нигеводов перек.тючение не происходит независимо ог положения рычага 40 переклк чс11и;1 ((j)Hi 9). Перек,1ючение п)оизойдет на том же ог)апичителе 31 хода нитеводов 11)п движении каретки слева направо, когда ()1)1ча1 40 перек,тючения займег вертпка.чь- ное рабочее положенне (фи1. 5 и 6).
Таким образом, для смены положений подвижного корпуса 12 необходимо осуществлять переключение на каждом ограничителе 31 хода нитеводов. Д,тя сох 1апения по. южения подвижного корпуса 12 пеобходи- мо выключить из )абот1)1 рычаг 40 переключения, придав ему yi .ioBoe положение (фиг. 7) на одном из ограничите,1ей 31 хода нитеводов. Чтобы опять перейти к перек.1К)- чению подвижного корпуса 12, не(ч )ходимо на том же ограничителе 31 хода нитеводов осуществить установку рыча1 а 40 переключения в вертикальном рабочее по. южение (фи1 . 5 и 6).
11 «л )ретепие иозЕю.тяет в или одной пет:1еобразующих системах одновременно отгягивать петли т1П1Котажа и п)оклады- вагь новую ПИТ,, а снижение прудоемкости
выработки изле.мия трикотажа за счет устранения вспомогательного неиерекрываемого 1фемени на ручные операции ведет к увеличению производительности н.чосковязальной машины.
Формула изобретения
I. Устройство д.;1я прок.чадываиия нити на плосковязалыюй , содержащее смонтированный на нитеводительной коробке. но меньшей мере один нен()движр|ый ните- нод, на корпусе которого установлена пластина с дугообразным назом для )аз.мещения в нем оси поворота подвижного нитевода или оси корпуса средства для оттяжки петель, которые имеют средство углового iiepe.Men.ie- ния, взанмодействуюн1.ее с механизмо.м программного переключения и включающее па0
5
леи, установ.чениый в профи-лированной дорожке с возможностью продольного перемещения, отличающееся тем, что, с целью повып ения производительноети, ередетво углового перемещения имеет щтангу, установленную с возможностью возвратно-поступательного перемещения в направляющих пластины, при этом последняя установлена на корпусе неподвижног о нитевода жестко, с)едство углового перемещения взаимодействует с механизмом программного переключения посредством щтанги, а профилированная дорожка размеп1,ена на последней.
2. Устройство по п. 1, отличающееся тем, ч го пластина содержит дополнительные пазы, а 1птанга - дополнительные профилированные дорожки по числу петлеобразующих систем ма111ины.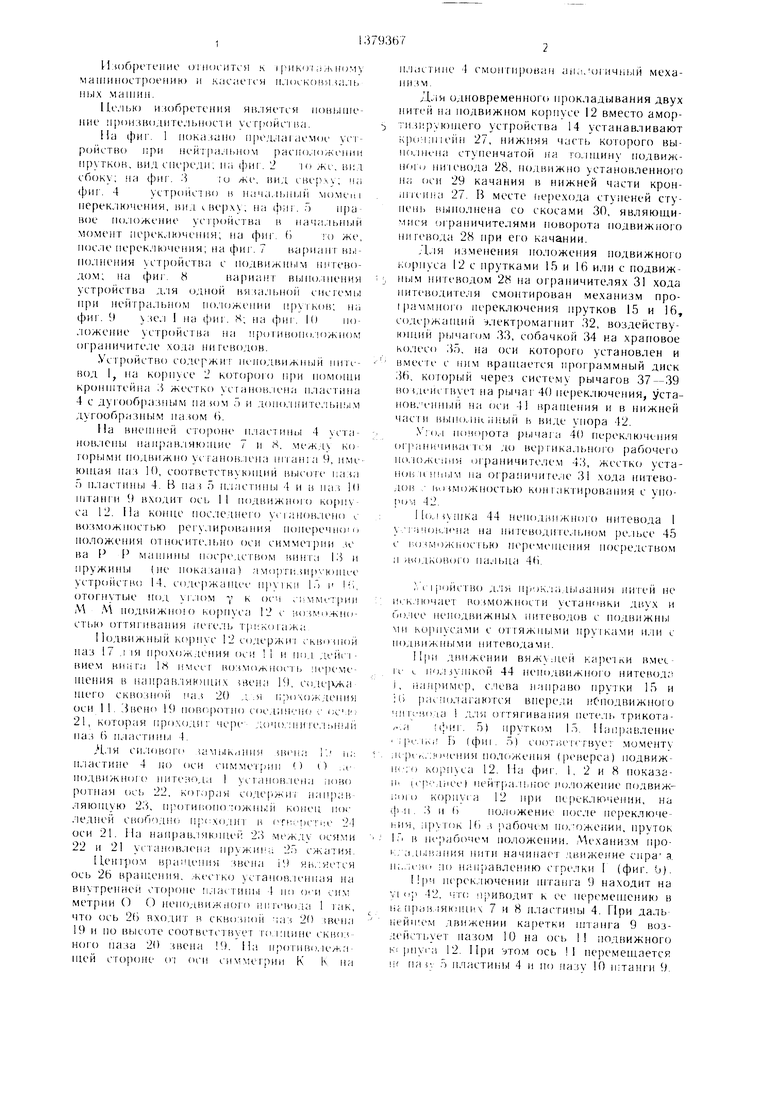


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прокладывания нити на плосковязальной машине | 1985 |
|
SU1293254A1 |
| Устройство для прокладывания нитей к плосковязальной машине | 1982 |
|
SU1106857A1 |
| Устройство для изготовления деталей из пруткового материала | 1986 |
|
SU1395407A1 |
| Приспособление к прядильным машинам периодического действия для смены бобин | 1952 |
|
SU98620A1 |
| Устройство для управления коробкой передач транспортного средства | 1987 |
|
SU1491744A1 |
| Каретка плосковязальной машины | 1985 |
|
SU1320287A1 |
| СПОСОБ ВЯЗАНИЯ КУЛИРНОГО ТРИКОТАЖА НА ПЛОСКОВЯЗАЛЬНОЙ МАШИНЕ | 1995 |
|
RU2100496C1 |
| Устройство для удаления пуха с кругловязальной машины | 1986 |
|
SU1379368A1 |
| Устройство для передачи изделий | 1986 |
|
SU1331759A1 |
| СПОСОБ ВЯЗАНИЯ КУЛИРНОГО ТРИКОТАЖА НА ПЛОСКОВЯЗАЛЬНОЙ МАШИНЕ | 1992 |
|
RU2092636C1 |
Изобретение относится к области трикотажного машиностроения, касается устройств для прокладывания нити па плоско- вязальной мапшне и позволяет повысить производительность машины. На корпусе неподвижного питевода на оси качания установлена П1танга, которая контактирует с подвижным корпусом для изменения угла качания и с механизмом программного управления. Корпус неподвижного нитевода содержит дополнительные дугообразные пазы, которые при качании подвижного корпуса воздействуют на в.ходяшие в них оси звена и кинематически связанного с ним подвиж- пого корпуса, па конце которого установлено амортизирующее устройство с отогнут1 1- ми под углом оттяжными прутками. При реверсе механизма вязания осуществляется переключение прутков так, что одип из luix устанавливается в рабочее положение в зеве машины для оттягивания пете,ть трикотажа, при котором противолежащие точки дугообразных пазов лежат па оси симметрии подвижного корпуса, образуюп1ей yro,i с осью симметрии неподвижного питевода, а в нейтральном положении прутков от разиых пазов расположены на оси симметрии пеподвижпого нитевода. 1 з.п. ф-, 1ы. К) и,т. ( (Л
/ /
j w ;j J2 m 9 19
22 bVj2r
9 U2 W 5
иг 5
-,
и
о
i
О
-
и
в
г
36 55
/4
22 4
О
S
Z1
76
CD и г. 8
1 noSepHij/770
Фиг. 9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
