гТ
00
со ел to
СХ)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения по дуге при стереофотосъемке | 1988 |
|
SU1597851A1 |
| ВЕЛОСИПЕД (ВАРИАНТЫ), КОЛЕСО ВЕЛОСИПЕДА, ПРИВОД ВЕЛОСИПЕДА, РЫЧАЖНЫЙ МЕХАНИЗМ ВЕЛОСИПЕДА, ПЕДАЛЬНЫЙ МЕХАНИЗМ ВЕЛОСИПЕДА И КОМПЛЕКТ, СОДЕРЖАЩИЙ ВЕЛОСИПЕД И ПРИЦЕП | 2007 |
|
RU2373101C2 |
| Стопорный механизм | 1990 |
|
SU1803633A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2022 |
|
RU2786863C1 |
| Цепная передача | 1990 |
|
SU1728556A1 |
| ПРИВОД УПРАВЛЕНИЯ ПРИСЛОННО-СДВИЖНОЙ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2765326C1 |
| ЛЕСОПИЛЬНАЯ РАМА | 2014 |
|
RU2557181C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| Механизм подъема стрелы манипулятора | 2018 |
|
RU2682866C1 |
Изобретение относится к рычажным механизмам с постоянным плечом силы. Цель изобретения - снижение материалоемкости механизма за счет оптимальной формы рычага 3, криволинейное плечо 3 которого выполнено в форме эвольвенты окружности, радиус которой равен длине прямолинейного плеча 4 рычага 3. При повороте рычага 3 на угол о (О ( рад) тяга 6 скатывается на подшипниках 7 по криволинейному плечу 5, оставаясь при этом всегда на линии, удаленной от центра шарнира 2 на расстояние г. В силу этого момент, создаваемый грузом 8 на шарнире 2, остается постоянным независимо от угла поворота рычага 3. 1 з.п. ф-лы, 1 ил.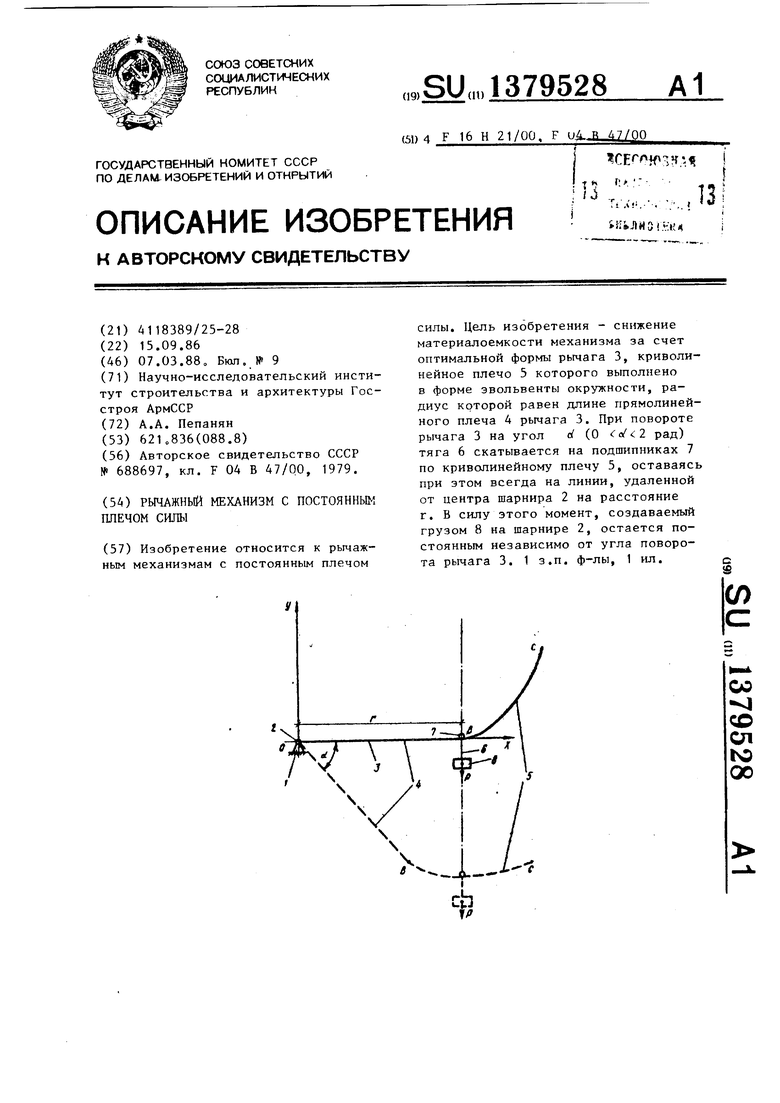
.,L,L
Ф
f/
Изобретение относится к машиностроению, а именно к рычажным грузоподъемным механизмам, и найдет применение, в частности, в нефтяных насосах- качалках, а также в других устройствах, где требуется иметь постоянный изгибающий или крутящий момент при изменении положения рычага
Цель изобретения - снижение материалоемкости механизма за счет выбора наиболее оптимальной формы рычага и повышения надежности„
На чертеже показана кинематическая схема механизма.
Механизм содержит стойку 1 и связанный с нею шарниром 2 рычаг 3, имеющий прямолинейное плечо 4 постоянной длины г и криволинейное плечо 5, выполненное в форме эвольвенты окружности с радиусом г. Эвольвента определена параметрическими уравнениями
X rCcosti+oi sinW) , Y г (sintf -Kcosof) ,
где X,Y - абсцисса и ордината точек эвольвенты с прямоугольной системе координат, начало которой совмещено с осью вращения рычага 3, а ось абсцисс совмещена с прямой проходящей через ось вращения рычага и начальную точку эвольвенты) г - длина прямолинейного плеча А рычага 3 или радиус окружности, очертания эвольвенты которой имеет криволинейное плечо 5 рычага 3, d - текущее значение угла поворота рычага 3 (О 0 2) , рад.
На рычаге 3 установлена тяга 6, на одном конце которой размещены подшипники 7 качения, обеспечивающие возможность перемещения тяги 6 вдоль рычага 3. На другом конце тяги 6 закреплен уравновешиванмций груз 8, создающий силу Р
Механизм работает следующим обра- зом
Исходное положение рычага 3 показано сплошными линиями. От усилия Р в TO TKf О шарнира 2 возникает момент Мв(-п f который может быть ис- поль И Итч в различных целях в зависимо i ч от назначения установки.
Из известного свойства эвольвенты, а именно, что нормаль в любой ее точке является касательной к эволюте, т.во к окружности с радиусом, равным г, следует, что ось действия силы Р на конце прямолинейного плеча 4 рычага 3 в его исходном положении является единой нормалью для всех точек криволинейного плеча 5 в процессе поворота рыг1ага 3 на произвольный угол о1 о Отсюда получаем, что касательные всех точек пересечения криволинейного плеча (эвольвенты) 5 с осью действия силы Р параллельны друг другу и оси абсцисс (ОХ), принятой выше прямоугольной системы координаТо Это, исходя из известных положений, соответствует условию экстремума (в данном случае минимума) функции - эвольвенты.
В силу описанных свойств эвольвенты при повороте рычага 3 на угол о (это положение показано пунктиром) груз 8, подвещеннын на тяге 6 с подшипником 7 качения на конце, скатывается вдоль криволинейного плеча 5 (кривой КС) с очертанием эвольвенты, занимая при этом наинизшие положения, совпадающие с точками минимума эвольвенты в данном положении. Изгибающий момент относительно точки О при этом останется постоянным
М
о( о
М
Р г const
0
5
0
Формула изобретения
X r(coso(+o/sina ) ; Y rCsintV-o cosof) ,
13795284
где X,Y - абс1щсса и ордината точекча рычага, мм ,
эвопьвенты в прямоуголь-« текущее значение угла поной системе координат, на-ворота рычага (О о/ 2),рад,
чало которой совмещенос
с осью вращения рычага, а 2. Механизм по п. 1, о т л и - ось абс1щсс совмещена с чающийся тем, что, с целью прямой, проходящей через повьппения надежности, на конце тяги, ось вращения рычага и на- предназначенном для взаимодействия
чальную точку эвольвенты,ю рычагом, установлены подшипники г - длина прямолинейного пле- качения.
| Станок-качалка | 1978 |
|
SU688697A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
