(Л
оо
со ел
со
IsD
rsj
Изобретение относится к машиностроению, а именно к преобразователям вращательного движения в возвратно-поступательное и наоборот, найдет применение, в частности, в моторостроении и Б компрессоростроении и является усовершенствованием изобретения по авт.сво № 1110969.
Цель изобретения - повышение дол- говечности и КПД механизма за счет замены трения скольжения на трение качения между грузом и шатуном.
На чертеже показана конструктивная схема механизма.
Механизм содержит корпус 1 с прямолинейными направляющими 2, размещенный в корпусе 1 с возможностью вращения вал 3 с кулачком 4 в виде эксцентрика, шатун 5 в виде кольца, установленного на эксцентрике 4 с возможностью вращения вокруг его оси и ползун 6 в виде штока, размещенный в направлякнцих 2 с возможностью возвратно-поступательного перемеще- ния и связанный с шатуном 5 щарни- ром 7. В эксцентрике 4 выполнен продольный паз 8, в котором размещен груз 9. На поверхности груза 9, предназначенной для взаимодействия с ша- туном 5, установлен подшипник 10 качения .
Механизм работает следуюшлм образом.
Усилие, воздействующее на ползун 6 через шарнир 7 передается на шатун 5. Под действием этого усилия ползун ft и шатун 5 смещаются вниз, при этом шатун 5, воздействуя на эксцентрик 4, поворачивает вал 3 на 180. Вторая половина оборота совершается валом 3 за счет сил инерции жестко связанного с ним маховика (не показан) или за счет изменения направления усилия, воздействующего на ползун 6. При врап1ении эксцентрика 4 вместе с валом 3 груз 9, размещенный в продольном пазу 8, под воздействием центробежных сил через установленный на его поверхности подшипник 10 качения прижимается к внутренней поверхности шатуна 5 и отжимает его так, что с противоположной пазу 8 стороны зазор между эксцентриком 4 и шатуном 5 всегда отсутствует. А это в свою очередь исключает ударные нагрузки при работе механизма . Формула изобретения
Эксцентриковый криво1шшно-ползун- ный механизм по авт.ев, № 1110969, отличающийся тем, что, с целью повышения долговечности и КПД, он снабжен подшипником качения, установленным на поверхности груза, предназначенной для взаимодействия с шатуном.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2004 |
|
RU2272198C1 |
| Эксцентриковый кривошипно-ползунный механизм | 1983 |
|
SU1110969A1 |
| Эксцентриковый механизм | 1986 |
|
SU1397653A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2004 |
|
RU2272197C1 |
| ЭКСЦЕНТРИКОВЫЙ ШАТУН | 1999 |
|
RU2178106C2 |
| МЕХАНИЗМ ПРИВОДА ПОЛЗУНА | 1998 |
|
RU2150624C1 |
| УПРАВЛЯЕМЫЙ ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2299371C1 |
| Поршневое устройство насоса | 2019 |
|
RU2716521C1 |
| Бесшатунный механизм поршневой машины | 2021 |
|
RU2781324C1 |
| ШЕСТИЦИЛИНДРОВЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2014 |
|
RU2603878C2 |
Изобретение относится к криво- шипно-ползунным преобразователям вращательного движения в возвратно-поступательное и наоборот и является усовершенствованием основного изобретения по авт.сВо № 1110969. Цель изобретения - повышение долговечности и К1Щ механизма,, При вращении вала 3 с закрепленньм на нем эксцентриком 4 груз 9 через подшипник 10 прижимается к внутренней поверхности шатуна 5 и тем самым ликвидирует зазор между эксцентриком 4 и шатуном 5. Вращательное движение эксцентрика 4 через шатун 5 преобразуется в возвратно-поступательное движение ползуна 6. Подшипник обеспечивает повышение КПД и долговечность за счет замены трения скольжения на трение качения между грузом 9 и внутренней поверхностью шатуна 5. 1 ил. с 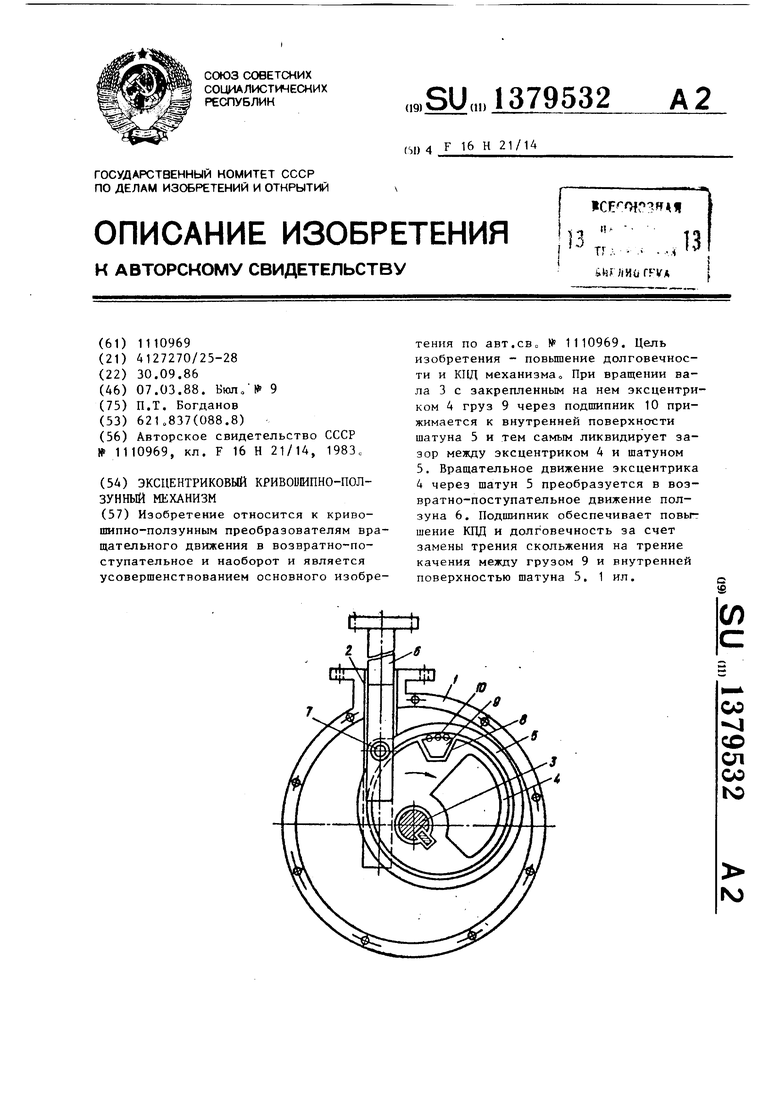
| Эксцентриковый кривошипно-ползунный механизм | 1983 |
|
SU1110969A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
