Изобретение относится к машиностроению и может быть использовано в тех случаях, когда необходимо получить возвратно-поступательное движение по перемещающейся траектории, например, при операциях притирки.
Цель изобретения - расширение кинематических возможностей за счет дополнительного перемещения исполнительного звена вдоль оси вращения механизма.
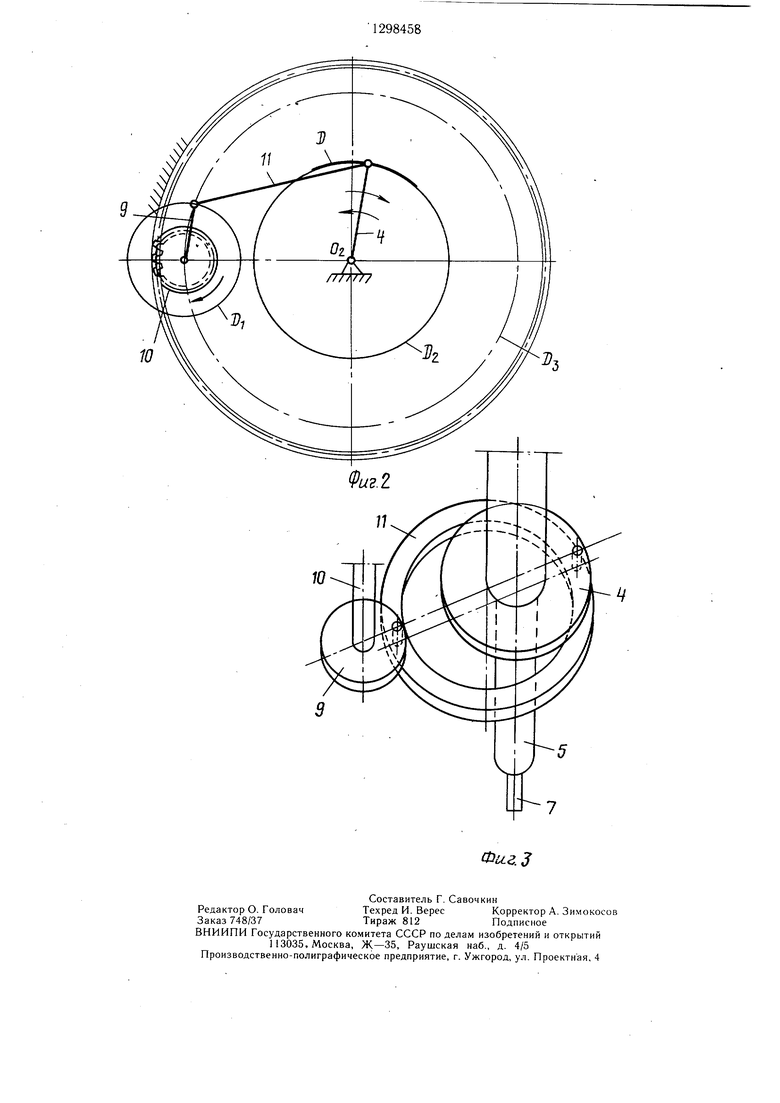
На фиг. 1 изображен предлагаемый механизм, разрез; на фиг. 2 - кинематическая схема механизма; на фиг. 3 - кинематическая связь кривошипа с коромыслом.
Механизм состоит из корпуса 1, выполненного в виде зубчатого колеса с внутренним зацеплением. Соосно зубчатому колесу на подщипниках в корпус 1 размещен шкив 2, концентрично которому в корпусе 1 установлен вал 3 с коромыслом 4 на конус. Вал 3 имеет осевое отверстие, в котором расположен ползун 5 с винтовой канавкой 6 на наружной поверхности и осевым отверстием некруглого сечения, например квадратного. Шток 7 размещен в некруглом отверстии и имеет возможность фиксации на корпусе 1. Палец 8 закреплен на валу 3 и расположен в винтовой канавке 6. В шкиве 2 выполнено отверстие, в котором на подшипниках установлен кривошип 9, на одном конце которого установлена шестерня 10, а другой при помощи шатуна 11 соединен с коромыслом 4. Шестерня 10 входит в зацепление с зубчатым колесом. Шатун 11 выполнен в виде кольца, обхватывающего ползун 5.
На ползуне 5 крепится исполнительное звено 12.
Механизм работает следующим образом.
Шток 7 фиксируется на корпусе 1. При вращении шкива 2 приводом (не показан) кривошип 9 перемещается по окружности Оз. Поскольку шестерня 10 взаимодействует с неподвижным зубчатым колесом, то сам кривошип врашается относительно оси Oi-Oi, а один из концов шатуна 11 перемещается относительно оси Oi-Oi, по окружности DI. Второй конецс щатуна 11 пере : (
мещается возвратно-поступательно по траектории D, которая, в свою очередь, перемещается вдоль окружности Dg.
Коромысло 4 совершает качательное движение вокруг оси 02-02.
Величина колебаний зависит от длины кривощипа 9, шатуна 11 и коромысла 4, а частота от передаточного отношения шестерни 10 и зубчатого колеса. Ползун, а вместе с ним и исполнительное звено 12 совершают колебательное движение относительно своей продольной оси с одновременным постепенным удалением вдоль этой оси от своего начального положения.
Величина продольного перемещения огра- , ничена длиной ползуна 5. Возвращение механизма в исходное положение осуществляется вращением штока 7, предварительно отсоединенного от корпуса 1.
Механизм преобразования вращательного движения в возвратно-поступательное 0 позволяет осушествить за счет обеспечения продольного перемещения оси вращения кривощипа перемещение исполнительного звена по траектории, форма которой может быть прямолинейной, круговой и винтообразной.
Формула изобретения
Механизм преобразования вращательного движения в возвратно-поступательное, содержащий корпус в виде зубчатого колеса внутреннего зацепления, размещенные в нем и установленные концентрично вал с , коромыслом на конце и шкив, шар- нирно установленный в последнем кривошип с шестерней на конце, взаимодействующей с зубчатым колесом, и щатун, связывающий кривошип с коромыслом, отличающийся тем, что, с целью расширения кинематических возможностей, вал имеет осевое отверстие, механизм снабжен размешенным в отверстии вала ползуном с вин- товой канавкой на наружной поверхности и осевым отверстием некруглого сечения, размещенным в нем штоком, пальцем, расположенным в винтовой канавке и закрепленным на валу, а щатун выполнен в виде обхватывающего ползун кольца.
w
7
Составитель Г. Савочкин
Редактор О. ГоловачТехред И. ВересКорректор А. Знмокосов
Заказ 748/37Тираж 812Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фи.г.д
Изобретение относится к машиностроению и позволяет расширить кинематические возможности за счет получения возвратно-поступательного движения по перемеш,аюшейся траектории. Вал 3 имеет осевое отверстие, в котором расположен ползун 5 с винтовой канавкой 6 на наружной поверхности и осевым отверстием некруглого сечения, в котором установлен шток 7. Палец 8 размешен в винтовой канавке 6 и закреплен на валу 3. Шкив 2 приводит в движение кривошип 9, шатун 11 и коромысло 4. Коромысло 4 связано с ползуном 5 посредством вала 3 и пальца 8, поэтому ползун 5 совершает колебательное движение бтносительно своей продольной оси с одновременным постепенным удалением вдоль этой оси от своего начального положения. 3 ил. (Л ьо со 00 4: СП 00 Фиг.1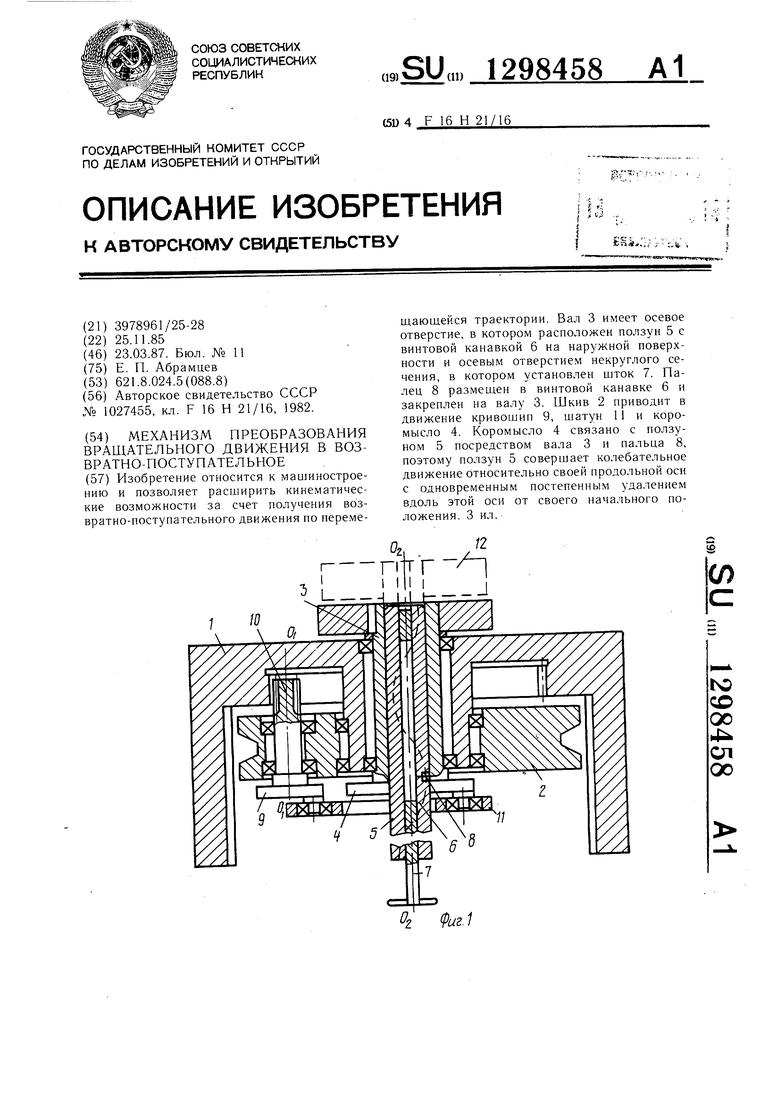
| Механизм преобразования вращательного движения в возвратно-поступательное | 1982 |
|
SU1027455A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
