00
со о: со
Изобретение относится к гидроакустическим измерениям и может быть .использовано при исследовании акустических полей сложных излучающих объ- актов.
Цель изобретения - расширение частотного диапазона в сторону низких частот и увеличение точности определения диаграммы направленности (ДН).
Согласно способу в гидроакустическом бассейне в качестве параметра акустического поля колеблющегося объекта измеряют нормальную составляющую вибрационной скорости V поверхности объекта. В воздушную заглушен- 1ую камеру помещают акустически жесткую модель объекта с геометрически подобными внешними обводами. По поверхности модели перемещают точечный монопольный акустический источник и измеряют в дальней зоне модели распределение звукового давления Р„ по замкнутой поверхности, охватывающей модель, определяя тем самым функцию Грина второй краевой задачи. Знание распределения вибрационн ой скорости и звукового давления позволяет определить ДН с помощью следующей формулы :
... . Л-1 М-(
р(П у а ) Ll --,- У У V P A b f S f,p, QTfJ(J, 0
PnmCr.y,),
где PI и pj - плотности соответственно
воды и воздухаJ f, и fj - частота рабочего диапазона соответственно в воде и в воздухе (f
С ., К
определяется как :;-i. -г); , А
, и Cj - скорость звука в воде
и в воздухе;
А - масштаб моделирования; Q(f, ) - производительность моно- дз польного источника на частоте
п,тп - индексы, соответствующие шп-му пространственному положению точки на ,« поверхности объекта и соответствующей ей точки на поверхности модели; q, S - индексы, соответствуюпше
qs-му угловому положению ее точки ДН{I
г - расстояние от модели до точки измерения давления;
0
5 0 5 0
5
G, - плотность распределения
точек измерения У„„; N, М - количество точек измерения.
На чертеже изображена блок-схема устройства, с помощью которого может быть реализован способ.
В гидроакустический бассейн 1 помещен излучающий объект 2. Геометрические размеры бассейна 1 выбраны из условия R D, где R - расстояние от объекта 2 до границ бассейна 1, D - максимальный геометрический размер объекта. Для возбуждения вибраций объекта 2 предназначен генератор 3, выход которого Соединен с входом усилителя 4 мощности, выход которого соединен с входом вибровозбудителя 5. Виброметр 6 включает зонд 7 и усилитель 8. Перемещение зонда 7 по поверхности объекта 2 осуществляется с помощью механического сканера 9. Блок 10 управления служит для управления перемещением сканера 9 и определения местоположения зонда 7. В месте установки вибровозбудителя 5 установлен неподвижно внбродатчик 11, вькод которого соединен с входом усилителя 12,.выходы виброметра 6 и уси- лителя 12 соединены с аналоговыми входами ЭВМ 13. В воздушную заглушенную камеру 14 помещена акустически жесткая модель 15 объекта 2. Масштаб моделирования определяют из соотношения
А
0
з
«
е
f мин с 2
frp- с,
где ffny, - низшая частота рабочего
диапазона объекта fpp - низшая граничная частота измерений заглушенной камеры .
Источник 16 акустических колебаний установлен на поверхности модели 15 с возможностью перемещения, он подключен к генератору 17, выход которого соединен с входом усилителя 18 мощности. В дальней зоне модели 15 установлен микрофон 19, перемещение которого осуществляется с помощью сканера 20. Блок 21 управления служит для управления перемещением сканера 20 и определения местоположения микрофона 19. Выход микрофона 19 соединен с входом усилителя 22. Выходы последнего и генератора 17 соединены с аналоговыми входами ЭВМ 13.
Способ осуществляют следующим образом.
Объект 2 возбуждают вибровозбудителем 5 подачей на вход последнего сигнала с генератора 3 через усилитель 4 мощности. Определение распределения нормальной составляющей вибрационной скорости поверхности объекта 2 осуществляют путем измерения зондом 7 в точках, расположенных по поверхности объекта 2 с плотностью G, i f Ли , (1 Де „ - длина изгибной волны объекта, Xje длина звуковой волны в воде), модуля амплитуды виброскорости (V и фазы скорости tf относительно фазы в опорной точке п О, m О, используя для этого сигнал с вибродатчика 11, С помощью ЭВМ 13 определяют
Vnm /Vprn/sigi costf.
На поверхности модели 15 последо- вательно в точках, соответствующих точкам измерения V,, помещают источник 16 акустических колебаний, который возбуждают подачей на него сигнала в рабочей полосе частот с гене- ратора 17 через усилитель 18 мощности. Определение распределения звукового давления, создаваемого источником 16, осуществляют микрофоном 19 в точках, расположенных с шагом
чв
56
йу(0,1-0,2), йр (0,1-0,2)- - на сферической поверхности, охватыва- кщей модель измерением модуля амплитуды звукового давления /Рл„,(г,у,|3д) / и фазы fqj относительно фазы.ц)°° , Сигнал с микрофона, пропорциональный мгновенному значению давления, и с генератора 17, служащий для определения фаз ср, подают на аналоговые 40 входы ЭВМ 13, с помощью которой определяют Pn(r,J,/3s) (Ркп,(. п м
cosCfag. ДН объекта 2 определяют по приведенной формуле.
45
Формула изобретения
Способ определения диаграммы направленности излучающих объектов в гидроакустическом бассейне, заключающийся в том, что объект помещают в гидроакустический бассейн, возбуждаю объект в рабочей полосе частот и регистрируют возникающее акустическое поле, по параметрам которого определяют диграмму направленности, отличающийся тем, что, с целью расширения частотного диапазона
5
0 5
и увеличения точности определения диаграммы направленности, в качестве параметра акустического поля измеряют распределение нормальной составляющей вибрационной скорости по поверхности У объекта,дополнительно в воздушную акустическую камеру помещают жесткую модель объекта с расположенным на ее поверхности точечным акустическим источником, перемещая источник по поверхности модели и измеряют в дальней зоне модели распределение звукового давления по замкнутой поверхности, охватывающей модель, а диаграмму направленности определяют с учетом формулы
P(r/A,.(ia) II t: n.V
Pnm(l.4.(5.
где р,
Q(f2)C5 ,
и
р2. - ПЛОТНОСТЬ соответственно воды и воздухаJ f, и 2 - частота рабочего диапазона соответственно в воде и воздухе,
i Cif J. С, А
20 25
т
55
30
/40
п, m 8 45
50
С, и С - скорость звука в воде
и воздухе соответственно;
. А - масштаб моделирования; Q(f ) - производительность монопольного источника на частоте индексы, соответствующие пт-му положению точки на поверхности объекта и соответствующей ей точки на поверхности модели, индексы, соответствующие qs-му угловому положению точки диаграммы направленности, (5, - плотность распределения точек измерения нормальной составляющей вибрационной скорости по поверхности объекта;
давление в дальней зоне модели в точке с угловыми (г,у ,Ад).координатами у, , создаваемое точечным монопольным акустическим источником, расположен«т
ным в nm-й точке поверхности модели;
К,М - количество точек измерения .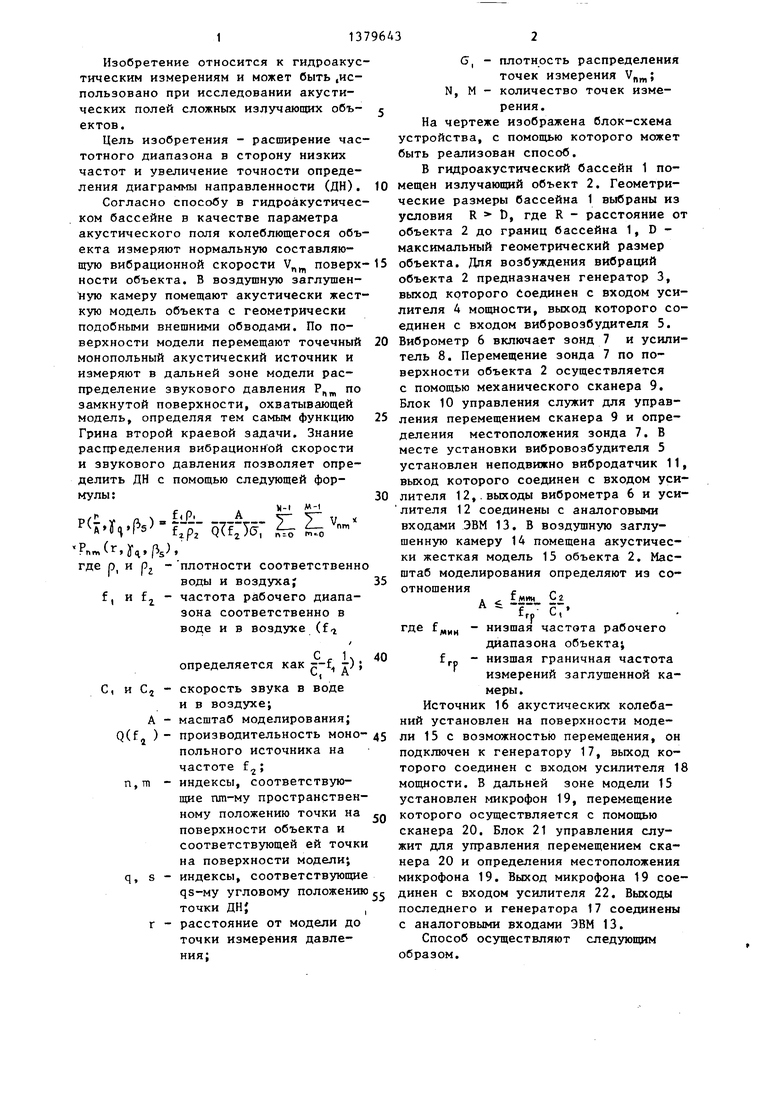

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОАКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПАРАМЕТРИЧЕСКОЙ ГЕНЕРАЦИИ УЛЬТРАЗВУКА | 2017 |
|
RU2697566C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ ПОДГОТОВКИ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2011 |
|
RU2464205C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614854C2 |
| АКУСТИЧЕСКИЙ ПЕЛЕНГАТОР | 1996 |
|
RU2138059C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТНОЙ ЗАВИСИМОСТИ КОЭФФИЦИЕНТА ОТРАЖЕНИЯ ЗВУКА ОТ ПОВЕРХНОСТИ | 2017 |
|
RU2655478C1 |
| Способ измерения характеристик направленности излучающей гидроакустической антенны | 2023 |
|
RU2817561C1 |
| СПОСОБ КОРРЕКЦИИ АМПЛИТУДНО-ФАЗОВОГО РАСПРЕДЕЛЕНИЯ ВОЗБУЖДЕНИЯ МНОГОКАНАЛЬНОЙ ГИДРОАКУСТИЧЕСКОЙ АНТЕННЫ | 2007 |
|
RU2346294C2 |
| НАПРАВЛЕННЫЙ СТЕРЖНЕВОЙ ПЬЕЗОКЕРАМИЧЕСКИЙ ИЗЛУЧАТЕЛЬ ДЛЯ УСТРОЙСТВА АКУСТИЧЕСКОГО КАРОТАЖА, УСТРОЙСТВО И СПОСОБ АКУСТИЧЕСКОГО КАРОТАЖА | 2011 |
|
RU2490668C2 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
Изобретение относится к гидроакустическим измерениям и может быть использованопри исследовании акустических полей слоеных излучающих объектов. Цель изобретения - расвшрение частотного диапазона в сторону низких частот и увеличение точности определения диаграммы направленности (ДН). ДН объекта определяют по результатам измерений в двух средах - воде и воздухе. В гидроакустическом бассейне измеряют нормальную составляющую вибрационной скорости поверхности возбужденного объекта. В воздушную заглушенную камеру помещают акустически жесткую модель объекта с геометрически подобными внешними обводами. По поверхности модели перемещают точечный акустический источник и измеряют в дальней зоне модели распределение звукового давления по замкнутой поверхности, охватывающей модель. По распределениям вибрационной ско- рости и звукового давления определяют ДН объекта по формуле. 1 ил. (Л
| Бовбер Р | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
