i
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления сортировкой изделий | 1986 |
|
SU1388111A1 |
| Устройство для контроля логических схем | 1990 |
|
SU1718222A1 |
| Система автоматического контроля параметров электронных схем | 1989 |
|
SU1700538A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| Устройство для ввода информации от датчиков | 1990 |
|
SU1691828A1 |
| Устройство для программного управления объектом | 1988 |
|
SU1605211A1 |
| Устройство для дискретного управления | 1983 |
|
SU1187150A2 |
| Многоканальное устройство для сбора и обработки информации | 1988 |
|
SU1524078A1 |
| Робототехнический комплекс | 1990 |
|
SU1726235A1 |
| Устройство для селекции изображений | 1988 |
|
SU1638718A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано при создании цикловых систем управления промьшшен- ных роботов, способных работать в гибких производственных системах.
Готобноиль llijcK Инсрормацианныи
бход
до 00
со
00
Цель изобретения - расширение функциональных возможностей и повьшение быстродействия устройства путем совмещения движений механизмов объекта управления. Устройство для циклового программного управления содержит блок памяти 1, счетчик импульсов 6, формирователь импульсов 14, .элемент И 13, элемент ИЛИ 9, первый 5 и второй 8 блоки сравнения, блок 7 триггеров, блок 4 датчиков положения, блоки элементов И 11, ИЛИ 10, блок 12 элемен1
Иэ,обретение относится к автомати- ке и вычислительной технике и может быть использовано при создании цикловых систем управления промьшшенными роботами, способных работать в гибких производственных системах.
Цель изобретения - расширение функциональных возможностей и повышение быстродействия устройства путем совмещения движений механизмов объекта управления.
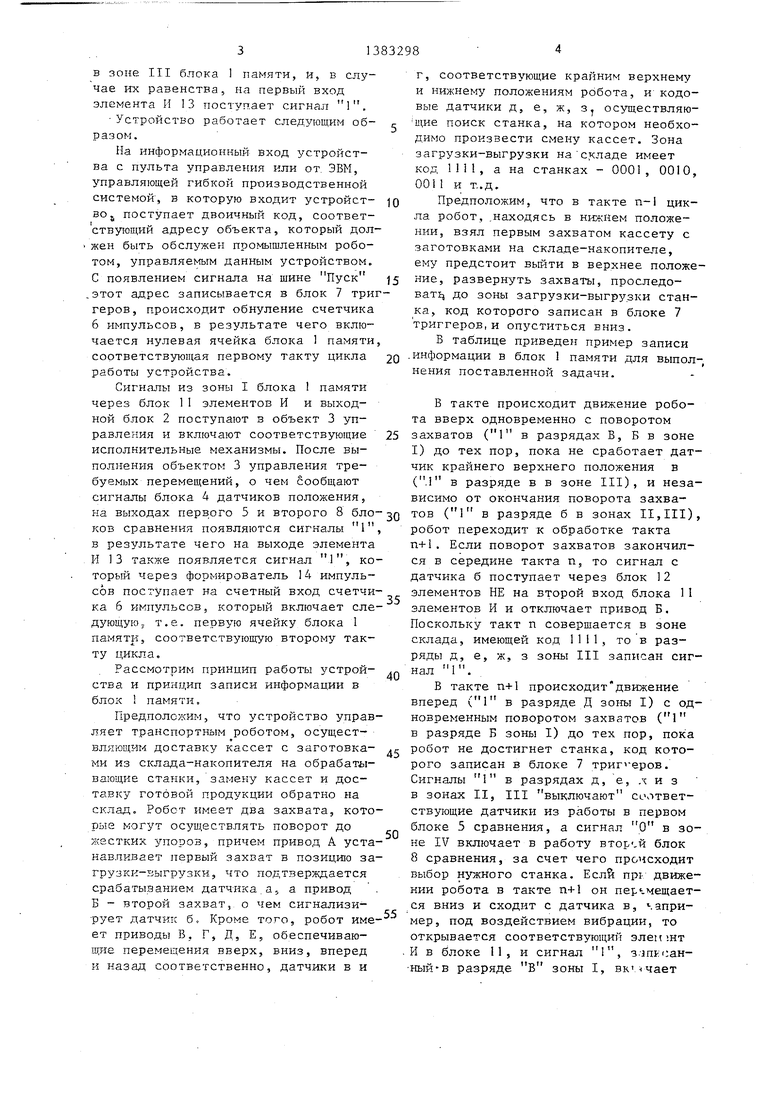
На чертеже представлена функциональная схема устройства.
Устройство содержит блок 1 памяти выходной блок 2, объект 3 управления блок 4 датчиков положения, первый блок 5 сравнения, счетчик 6 импульсов, блок 7 триггеров, второй блок 8 сравнения, элемент ИЛИ 9, блок 10 элементов ИЛИ, блок 11 элементов И, блок 12 элементов НЕ, элемент И 13, формирователь 14 импульсов, шины Пуск и Готовность, информационный вход устройства.
Блок 1 памяти имеет пять зон записи информации, соответствующих пяти выходам блока. В зону III записана информация о последовательности включения приводов объектов 3 управления. В зонах II и I записана информация о состоянии датчиков положения соответствующем окончанию каждого такта цикла, прцчем в зоне II сигнал 1 записан в разряды, соответствующие тем датчикам, состояние которых может принимать любые значения в данном такте цикла, а в остальные разряды записан сигнал О. В зоне I в
тов НЕ, при этом формирователь импульсов выполнен в виде ждущего мультивибратора. Устройство позволяет совместить движение исполнительных механизмов, повысить надежность посредством осуществления автоматической коррекции положения исполнительных механизмов в процессе работы и расширить область применения за счет возможности использования в гибких производственных системах. 1 з.п. ф-лы, I табл., } ил.
с
5
0
5
0
5
разряды, соответствующие тем датчикам, состояние которых должно принять значение О, записан сигнал О, а во все остальные разряды - 1. В разряд зоны IV записан сигнал О в тех тактах, в которых происходит поиск объекта с адресом, записанным в блоке 7 триггеров, а во всех остальных тактах в зоне IV записан сигнал 1. Сигнал 1, записанный в зоне V в последнем такте цикла, поступает на шину Готовность и сообщает о том, что устройство закончило цикл работы и готово приступить к новому.
Сигналы с первого выхода блока 4 датчиков положения сообщают о дости- жении исполнительными механизмами объекта 3 управления конечных положений и поступают через блок 12 элементов НЕ на второй вход 11 элементов И, который отключает соответствующий привод объе кта 3 управления. Сигналы с второго выхода блока 4 датчиков положения представляют собой код объекта, подлежащего обслуживанию роботом, и поступают во второй блок 8 сравнения, где сравниваются с информацией блока 7 триггеров.
- На выходе блока 10 элементов ИЛИ сигналы с тех датчиков положения, которые необходимо выключить в данном такте, принимают значение 1, а все остальные свое натуральное значение .
В первом блоке 5 сравнения сигналы с датчиков положения сравниваются с заданными значениями, записанными
в зоне III блока 1 памяти, и, в случае их равенства, на первый вход элемента И 13 поступает сигнал 1.
Устройство работает следующим образом.
На информационный вход устройства с пульта управления или от. ЭВМ, правляющей гибкой производственной системой, в которую входит устройст- 10 воJ поступает двоичный код, соответствующий адресу объекта, который долен быть обслужен промышленным робоом, управляемым данным устройством. появлением сигнала на шине Пуск J5 этот адрес записывается в блок 7 триггеров, происходит обнуление счетчика 6 импульсов, в результате чего вклюается нулевая ячейка блока 1 памяти, соответствующая первому такту цикла 20 аботы устройства.
Сигналы из зоны I блока 1 памяти ерез блок 1I элементов И и выходной блок 2 поступают в объект 3 управления и включают соответствующие 25 исполнительные механизмы. После выполнения объектом 3 управления требуемых перемещений , о чем сообщают сигналы блока 4 датчиков положения, на выходах первого 5 и второго 8 бло- JQ ков сравнения появляются сигналы 1, в результате чего на выходе элемента И 13 также появляется сигнал 1, который через формирователь 14 импульсов поступает на счетный вход счетчика 6 импульсов, который включает следующую j т.е. первую ячейку блока 1 памяти, соответствующую второму такту цикла.
Рассмотрим принцип работы устройства и принцип записи информации в блок памяти.
Предположим, что устройство управляет транспортным роботом, осуществляющим доставку кассет с заготовками из склада-накопителя на обрабат - вающие станки, замену кассет и доставку готовой продукции обратно на склад. Робот имеет два захвата, которые могут осуществлять поворот до жестких упоров, причем привод А устанавливает 1тервый захват в позицию за- грузкк-зыгрузки, что подтверждается срабатыванием датчика а а привод Б - второй захват, о чем сигнализирует датчик б. Кроме того, робот имеет приводы В. Г, Д, Е, обеспечивающие перемещения вверх, вниз, вперед и назад соответственно, датчики в и
35
40
45
50
55
0 5 0
5 Q
5
0
5
0
5
г, соответствующие крайним верхнему и нижнему положениям робота, и кодовые датчики д, е, ж, з, осуществляю- щие поиск станка, на котором необходимо произвести смену кассет. Зона загрузки-выгрузки на с.кладе имеет код П1, а на станках - 0001, 0010, 001 1 и т..д.
Предположим, что в такте п-1 цикла робот, .находясь в нижнем положении, взял первым захватом кассету с заготовками на складе-накопителе, ему предстоит выйти в верхнее положение, развернуть захваты, проследо- ват до зоны загрузки-выгрузки станка, код которого записан в блоке 7 триггеров, и опуститься вниз.
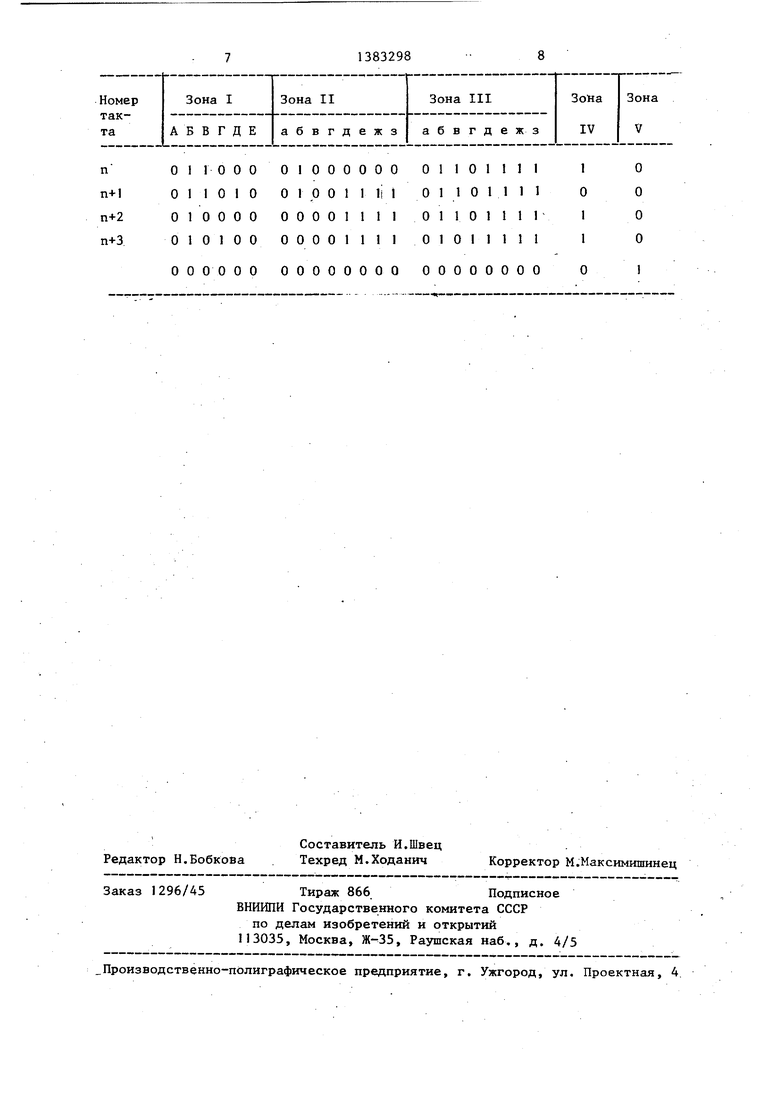
В таблице приведен пример записи .информации в блок 1 памяти для выпол-, нения поставленной задачи.
В такте происходит движение робота вверх одновременно с поворотом захватов (1 в разрядах В, Б в зоне I) до тех пор, пока не сработает датчик крайнего верхнего положения в (.1 в разряде в в зоне III), и независимо от окончания поворота захватов (1 в разряде б в зонах 11,111), робот переходит к обработке такта п+1. Если поворот захватов закончился в середине такта п, то сигнал с датчика б поступает через блок 12 элементов НЕ на второй вход блока 1I элементов И и отключает привод Б. Поскольку такт п совершается в зоне склада, имеющей код 1111, то в разряды д, е, ж, 3 зоны III записан сигнал 1. ,
В такте п+1 происходит движение вперед (1 в разряде Д зоны I) с одновременным поворотом захватов (1 в разряде Б зоны I) до тех пор, пока робот не достигнет станка, код которого записан в блоке 7 триг -еров. Сигналы I в разрядах д, е, л и з в зонах II, III выключают соответствующие датчики из работы в первом блоке 5 сравнения, а сигнал О в зоне IV включает в работу второй блок 8 сравнения, за счет чего происходит выбор нужного станка. Если npi- движении робота в такте п+1 он перемещается вниз и сходит с датчика в, чапри- мер, под воздействием вибрации, то открывается соответствующий элем шт И в блоке 11, и сигнал I, з пкоан- ный-в разряде В зоны I, вк ,1чает
5
привод в до тех пор, пока вновь не сработает датчик в, сигнал с которго поступает через соответствующий элемент НЕ блока 12 на второй вход соответствующего элемента И блока и отключает привол В.
Таким образом, производится автматическая коррекция положения исполнительных механизмов робота без нарушения цикла работы. Аналогично производится коррекция положения зватов робота за счет наличия сигна 1 в разряде Б зоны I в такте п+1
При достижении роботом требуемо станка устройствоj независимо от
окончания поворота, захватов (1 в разряде б в зонах .II, III), переходит к исполнению такта п+2, где производится анализ выполнения поворота захватов (О в разряде б зоны II и 1 в разряде б зоны III). Если поворот закончен до начала такта п+2, то формирователь 14 импульсов, выпол ненный в виде ждущего мультивибрато- ра, формирует два импульса, устройст во сразу переходит к исполнению такта п+З.
поворот не завершен, то устройство ждет его окончания в такте п+2 и с приходом сигнала: от датчика б переходит к исполнению такта п+З, где робот совершает движение вниз (I в разряде Г зоны I) до срабатывания датчика г (1 в разряде г зоны III). В такте п+З также производится коррекция положения захватов за счет сигнала 1 в разряде Б зоны I .
В последнем такте m цикла записывается сигнал 1 в зоне V, а во все остальные разряды записывается, например, сигнал О, чтобы устройство не перешло к такту т+1.
50
При установлении электрической пе-., ва, установочный вход которого соеди- .. г-,. jjgjj J. записывающим входом блока триггеров и с обнуляющим входом счетчика импульсов, выход второго блока сравнения соединен с первым входом элемента ИЛИ, выход которого подключен к второму входу элемента И, а второй вход - к четвертому выходу блока памяти, пятый выход которого соединен с шиной готовность устройства.
ремычки между шинами Пуск и Гьтов- ность, устройство после завершения цикла К работы автоматически приступает к выполнению цикла К+1.
Применение изобретения позволяет значительно повысить производительт ность обслуживаемого оборудования путем совмещения движений исполнительных механизмов, повысить надежность посредством осуществления автоматической коррекции положения исполнительных механизмов в процессе работы и р 1сширить область применения уст55
роиства за счет возможности использования в гибких производственных системах.
Формула изобретения
0
5
0 5 .
д
5
0
01 1000 01 1010 010000 010100
01000000
01 p 0 1 1 li 1
000011 1 1 00001111
0 0 00 00 00000000 00000000
1101111 1 1011 1 I 1 101 1 1 г 1011111
0000000
1
0
1
1
0
0 0 0 0
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
