00
00
4
о:
)
Изобретение относится к землеройным машинам непрерывного действия, а именно к их гидроприводам.
Цель изобретения - повьшение надеж- ности работы машины за счет обеспечения работы гидросистемы рабочего органа в автоматическом режиме управления гидроцилиндром регулирования ширины срезаемой стружки в зависимости от нагрузки на гидромотор привода шне- кового вала.
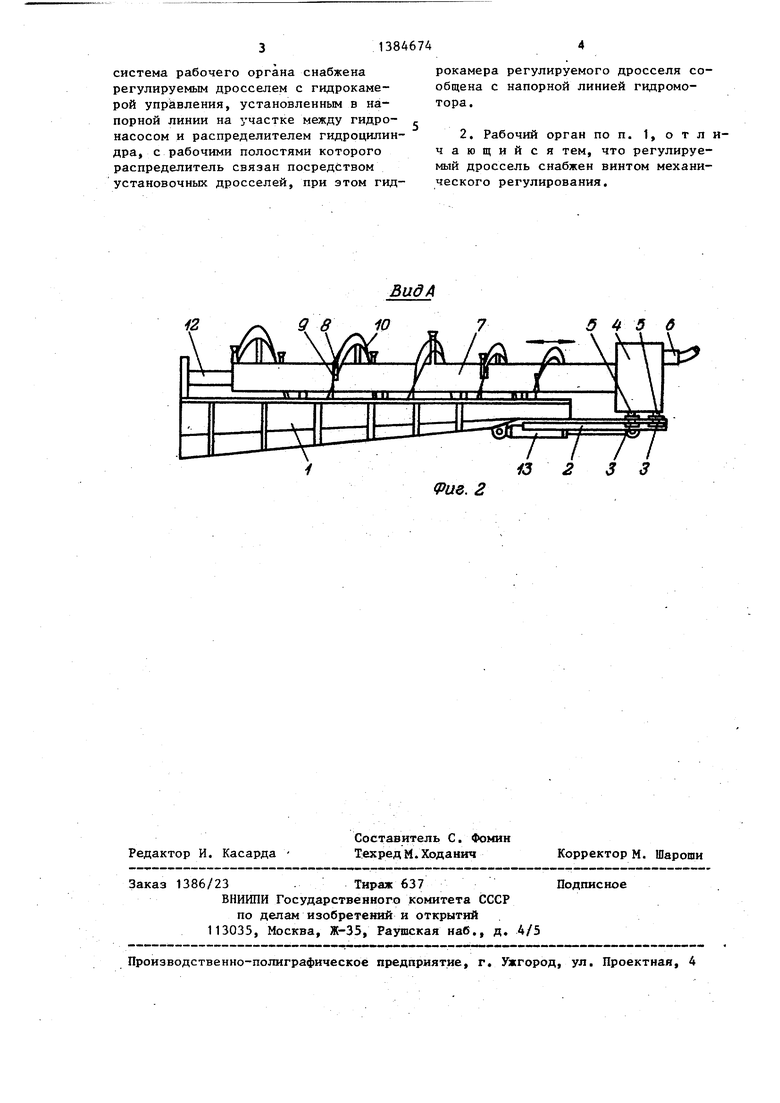
На фиг. 1 изображен рабочий орган землеройной машины с гидравлической системой; на фиг. 2 - вид А на фиг.1.
Рабочий орган землеройной машины состоит из рамь t, соединенной с базовой машиной. На раме 1 жестко закреплены рельсовые направляющие 2, свободные концы которых вхоДят в за- цепление с выемками роликов 3, установленных на корпусе редуктора 4, с помощью осей 5. Редуктор 4 с приводов от гидромотора 6 соединен с полым валом 7, на котором с равномерным шагом по винтовой линии размещены режущие элементы 8, снабженные кронштейнами
9.К последним крепится лента шнека
10,Нижний конец полого вала 7 выполнен со шлицами 11, охватывающими шлицевой вал 12, который связан с рамой
и имеет возможность вращения вокруг своей продольной оси, например, на
Подшипниках.
1.
Привод возвратно-поступательного
перемещения полого вала 7 осуществляется при помощи гидроцилиндра 13, один конец которого связан с рамой 1, а другой - с приводом. Кроме то- го, гидронасос 14 соединен трубопроводами с гидромотором бис имеющим гидрокамеры управления регулируемым дросселем 15, выход которого соединен с входом распределителя 16. Вход и выход дросселя 15 могут перекрываться плунжером 17, внутри которого находится пружина с регулировочным винтом 18, а надплунжерное пространство С (гидрокамера управления) сое- динено трубопроводом с напорной магистралью гидромотора 6. Выходы распределителя 16 соединены с входами установочных дросселей 19, а их выходы - с полостями гидроцилиндра 13. Реверс распределителя 16 осуществляется с помощью переключателей 20.Для предохранения гидравлической систе1МЫ от перегрузок, в магистраль гидромотора 6 и гидроцилиндра 13 включе- ны перепускные клапаны 21.
Рабочий орган землеройной машины работает следующим образом.
От гидронасоса 14 приводится во вращение гидромотор 6, который через понижающий редуктор 4 передает вращающий момент на полый вал 7 шнека 10. Одновременно с помощью трубопроводов к гидросистеме через дроссель 15, распределитель 16 и установочные дроссели 19 подключается гидроци-. f линдр 13. Дроссель 15 производит регулировку расхода жидкости в зависимости от давления в подводящем трубопроводе гидромотора 6. При увеличении нагрузки, а следовательно, и давления в подводящем трубопроводе гидромотора 6, которое по трубопроводу передается в надплунжерное пространство С и вЬздействует на плунжер 17, перемещение последнего вызывает перекрытие входного и выходного каналов дросселя 15, через который рабочая жидкость прступает к гидроцилиндру 13.
Уменьшение расхода жидкости через дроссель 15 вызывает уменьшение скорости перемещений штока гидроцилиндра 13, а следовательно, и ширины срезаемой стружки. Регулировку момента срабатьшания автоматического дросселя 15 производят при помощи пружины и винта 18. Реверс гидроцилиндра 13 происходит при переключении распределителя 16 переключателями 20. Дня установочной регулировки скорости прямого и обратного ходо гидроцилиндра 13 в его магистраль включены установочные дроссели 19. Перепускные клапаньт 21, включенные в магистраль гидромотора 6 и гидроцилиндра 13, предотвращают перегрузку гидросистемы.
Ф о р м у л а изобретения
1. Рабочий орган землеройной машины по авт. св. К 1305270, отличаю щи и с я тем, что, с целью повышения надежности работы мапмны за счет обеспечения работы гидросистемы рабочего органа в автоматическом режиме управления гидроцилиндром регулирования ширины срезаемой стружки в зависимости от нагрузки на гидромотор привода шнекового вала, гидросистема рабочего органа снабжена регулируемым дросселем с гидрокамерой управления, установленным в напорной линии на участке между гидронасосом и распределителем гидроцилиндра, с рабочими полостями которого распределитель связан посредством установочных дросселей, при этом гидрокамера регулируемого дросселя сообщена с напорной линией гидромотора.
2, Рабочий орган по п. 1, отличающийся тем, что регулируемый дроссель снабжен винтом механического регулирования.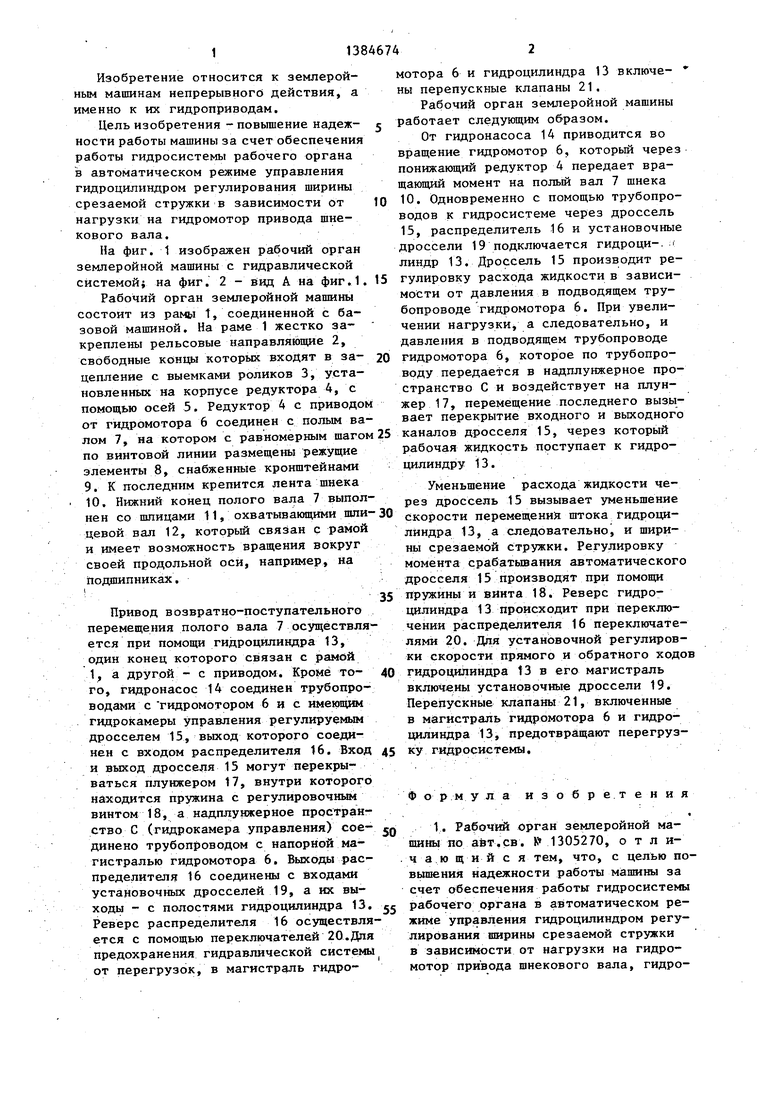
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод рабочего органа землеройной машины | 1990 |
|
SU1773274A3 |
| Объемная гидромеханическая передача землеройной машины | 1982 |
|
SU1059093A1 |
| Гидросистема управления рабочими органами шпалоподбивочного устройства | 1990 |
|
SU1761844A1 |
| Синхронизированный привод подающего транспортера агрегата для внесения минеральных удобрений | 1991 |
|
SU1822641A1 |
| Машина для рытья траншей | 1979 |
|
SU829825A1 |
| Землеройная машина | 1979 |
|
SU861510A1 |
| Бульдозер | 1981 |
|
SU1004545A1 |
| Нагружатель стенда для испытания землеройной машины | 1987 |
|
SU1472586A1 |
| Землеройная машина | 1982 |
|
SU1060771A1 |
| Шнековый траншеезасыпатель | 1985 |
|
SU1283310A1 |
Изобретение относится к землеройной технике. Цель изобретения - повьшение надежности работы машины за счет обеспечения работы гидросистемы рабочего органа в автоматическом режиме управления гидроцилиндром 13 .регулирования ширины срезаемой стружки в зависимости от нагрузки на гидромотор привода шнекового ва«па. Для этого гидросистема рабочего органа имеет регулируемый дроссель 15 с гидрокамерой управления. Дроссель 15 установлен в напорной линии на участке между гидронасосом 14 и распределителем 16 гидроцилиндра 13, с рабочими полостями которого распределитель связан посредством установочных дросселей 19. Гидрокамера управления дросселя 15 сообщена с наг порной линией гидромотора 6. Дроссель 15 регулирует расход жидкости в зависимости от давления в подводящем трубопроводе гидромотора 6. Регулировку срабатьшания дросселя 15 производят винтом 18. Реверс гидроцилиндра 13 происходит при переключении распределителя 16. Для установочной регулировки скорости прямого и обратного хода гидроцилиндра 13 включают дроссель 19. 1 з.п. ф-лы. .2 ил. § сл
/2
ff
Бид/1
S 5 б
fPue. 2
| Рабочий орган землеройной машины | 1985 |
|
SU1305270A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
