10
11384702
Изобретение относится к насосным винтовым агрегатам и героторным механизмам общего применения и может быть использовано при бурении нефтяных и газовых скважин в качестве гидравлических забойных винтовых двигателей.
Известен забойный винтовой двига- , тель, содержащий статор и располб- женный внутри него ротор, имеющие специально спрофилированные винтовые рабочие поверхности, шарнирное соединение и шпиндель 1.
Недостатком указанной конструкции двигателя является высокий уровень контактных напряжений в паре и меж- витковых перепадов давления на линиях уплотнения, поскольку технологические ограничения длины статора не позволяют выполнить рабочие органы двш ателя оптимальной длины. Это приводит к возникновению в двигателе больших радиальных нагрузок и моментов.25
Кроме того, для данной конструкции винтового двигателя характерен высокий уровень вибраций, возникающих в про- цессе эксплуатации двигателя. Вибрапорн ст ос ст ге об ге ст ни в
на
15
20
р р
на
л
п п то
ге ре
0
5
последовательно установленные герото- рные механизмы, включающие соосные статоры и размещенные в них роторы, оси которых смещены относительно оси статоров на величину эксцентриситета героторных механизмов, последние объединены в модули, причем роторы героторных механизмов связаны посредством направляющих узлов для смещения оси каждого последующего ротора в модуле относительно оси предьщущего
. 360° на угол
о ----, где N - число ге
роторных механизмов в модуле, равно 2 и более, и последовательного разворота модулей относительно друг друга
о Збо на угол р ---,.где М число модулей, равно 2 и более.
Кроме того, направляющие узлы выполнены в виде кривошипов, рабочие поверхности которых установлены в роторах посредством подшипников.
На фиг. 1 изображена конструкция героторной машины, продольный разрез; на фиг. 2 - сечение А-А на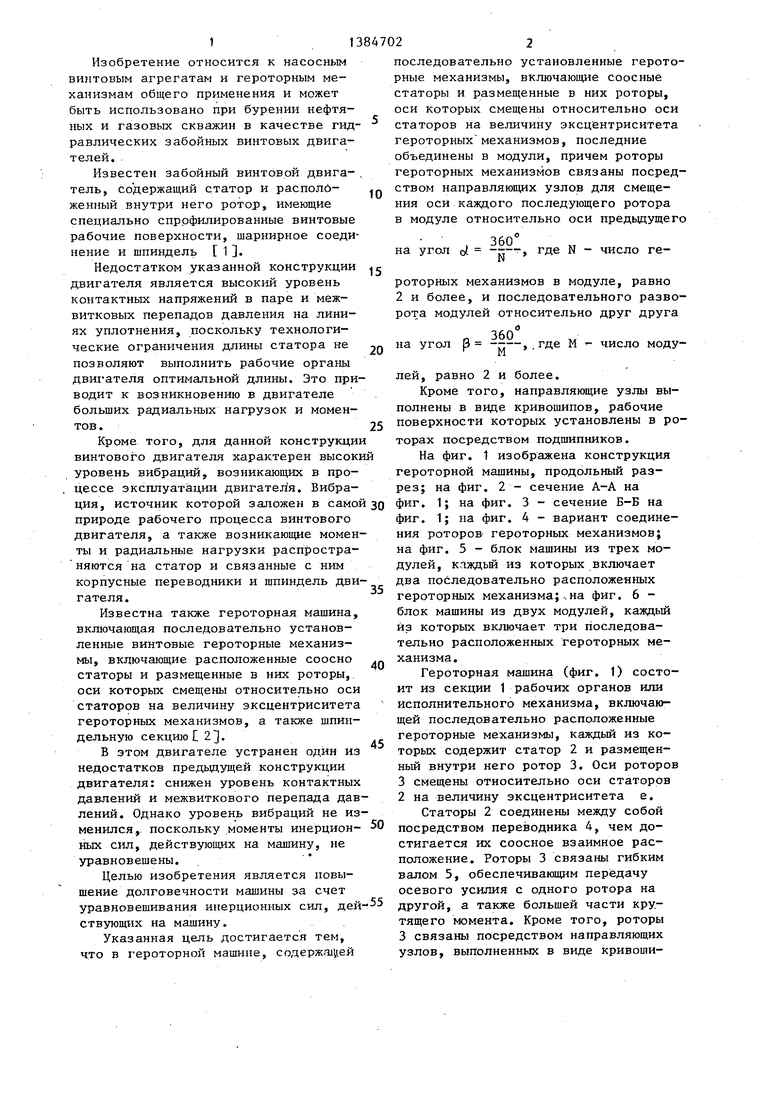

| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕРОТОРНАЯ МАШИНА | 2007 |
|
RU2345208C1 |
| ВИНТОВОЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2524238C2 |
| ЗАБОЙНАЯ ГЕРОТОРНАЯ ВИНТОВАЯ ГИДРОМАШИНА | 2005 |
|
RU2318108C2 |
| КАРДАННЫЙ ВАЛ ДЛЯ СОЕДИНЕНИЯ РОТОРА ВИНТОВОЙ ГЕРОТОРНОЙ ГИДРОМАШИНЫ СО ШПИНДЕЛЕМ | 2005 |
|
RU2285781C1 |
| ТУРБОВИНТОВОЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2295023C1 |
| СТАТОР ВИНТОВОЙ ГЕРОТОРНОЙ ГИДРОМАШИНЫ | 2005 |
|
RU2300617C2 |
| ЗАБОЙНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2334073C2 |
| ВИНТОВОЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2365726C1 |
| СТАТОР ВИНТОВОЙ ГЕРОТОРНОЙ ГИДРОМАШИНЫ | 2005 |
|
RU2285823C1 |
| ГЛУБИННЫЙ ДАТЧИК ЧИСЛА ОБОРОТОВ РОТОРА ЗАБОЙНОГО ДВИГАТЕЛЯ | 1973 |
|
SU432268A1 |


ция, источник которой заложен в самой зо фиг. 1; на фиг. 3 - сечение Б-Б на
природе рабочего процесса винтового двигателя, а также возникающие моменты и радиальные нагрузки распростра- няются на статор и связанные с ним корпусные переводники и щпиндель двигателя.
Известна также героторная машина, включающая последовательно установленные винтовые героторные механизмы, включающие расположенные соосно
статоры и размещенные в них роторы, оси которых смещены относительно оси статоров на величину эксцентриситета героторных механизмов, а также шпиндельную секцию С 2.
В этом двигателе устранен один из недостатков предыдущей конструкции двигателя: снижен уровень контактных давлений и межвиткового перепада давлений. Однако уровень вибраций не изменился, поскольку моменты инерцион- ных сил, деиствуюш 1х на машину, не уравновешены.
Целью изобретения является повышение долговечности машины за счет уравновешивания инерционных сил, дей ствующих на машину.
Указанная цель достигается тем, что в героторной машине, содержа1у ей
i35
40
45
0
55
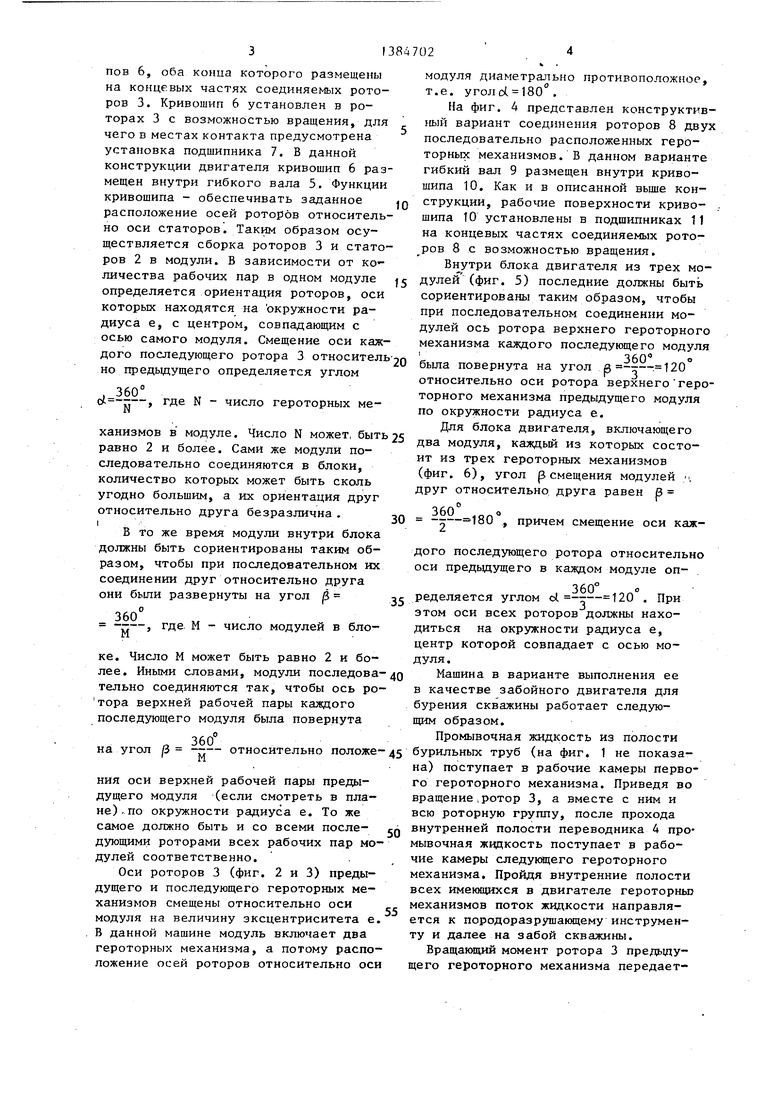
фиг. 1; на фиг. 4 - вариант соединения роторов героторных механизмов; на фиг. 5 - блок машины из трех модулей, клждьй из которых включает два последовательно расположенных героторных механизма;..на фиг. 6 - блок машины из двух модулей, каждый из которых включает три последовательно расположенных героторных механизма .
Героторная машина (фиг. 1) состоит из секции 1 рабочих органов или исполнительного механизма, включающей последовательно расположенные героторные механизмы, каждый из которых содержит статор 2 и размещенный внутри него ротор 3. Оси роторов 3 смещены относительно оси статоров
2на величину эксцентриситета а.
Статоры 2 соединены между собой посредством переводника 4, чем достигается их соосное взаимное расположение. Роторы 3 связаны гибким валом 5, обеспечивающим передачу осевого усилия с одного ротора на другой, а также большей части крутящего момента. Кроме того, роторы
3связаны посредством направляющих узлов, выполненных в виде кривошипов 6, оба конца которого размещены на концевых частях соединяемых роторов 3. Кривошип 6 установлен в роторах 3 с возможностью вращения, для чего в местах контакта предусмотрена установка подшипника 7. В данной конструкции двигателя кривошип 6 размещен внутри гибкого вала 5. Функции кривошипа - обеспечивать заданное расположение осей роторов относительно оси статоров. Таким образом осуществляется сборка роторов 3 и статоров 2 в модули. В зависимости от количества рабочих пар в одном модуле определяется ориентация роторов, оси которых находятся на окружности радиуса е, с центром, совпадающим с осью самого модуля. Смещение оси каждого последующего ротора 3 относитель но предыдущего определяется углом
, 360° „
, где N - число героторных механизмов в модуле. Число N может, быть равно 2 и более. Сами же модули последовательно соединяются в блоки, количество которых может быть сколь угодно большим, а их ориентация друг относительно друга безразлична .
В то же время модули внутри блока должны быть сориентированы таким образом, чтобы при последовательном их соединении друг относительно друга они были развернуты на угол |3
Збо „- «
--, где М - число модулей в бло- М
ке. Число М может быть равно 2 и более. Иными словами, модули последовательно соединяются так, чтобы ось ро- тора верхней рабочей пары каждого последующего модуля была повернута
« 360° на угол /3 --- относительно положения оси верхней рабочей пары предыдущего модуля (если смотреть в плане) . по окружности радиуса е. То же самое должно быть и со всеми после- дующими роторами всех рабочих пар модулей соответственно.
Оси роторов 3 (фиг. 2 и 3) предыдущего и последующего героторных механизмов смещены относительно оси
модуля на величину зксцентриситета е. В данной машине модуль включает два героторных механизма, а потому расположение осей роторов относительно оси
. Qjjпп
25 о
эг
до
45
сА
5
модуля диаметрально противоположное, т.е. уголо(. 180 .
На фиг. 4 представлен конструктивный вариант соединения роторов 8 двух последовательно расположенных героторных механизмов. В данном варианте гибкий вал 9 размещен внутри кривошипа 10. Как и в описанной выше конструкции, рабочие поверхности криво- .. шипа 10 установлены в подшипниках 11 на концевых частях соединяемых рото- ров 8 с возможностью вращения.
Внутри блока двигателя из трех модулей (фиг. 5) последние должны быть сориентированы таким образом, чтобы при последовательном соединении модулей ось ротора верхнего героторного механизма каждого последующего модуля
1Sftn о
бьша повернута на угол 0 относительно оси ротора верхнего героторного механизма предыдущего модуля по окружности радиуса е.
Для блока двигателя, включающего два модуля, каждый из которых состоит из трех героторных механизмов (фиг. 6), угол р смещения модулей , друг относительно друга равен В
збо .„„о
, причем смещение оси каждого последующего ротора относительно оси предьщущего в каждом модуле оп1
ределяется углом о(. . При этом оси всех роторов должны находиться на окружности радиуса е, центр которой совпадает с осью модуля .
Машина в варианте выполнения ее в качестве забойного двигателя для бурения скважины работает следующим образом.
Промывочная жидкость из полости бурильных труб (на фиг. 1 не показана) поступает в рабочие камеры первого героторного механизма. Приведя во вращение,ротор 3, а вместе с ним и всю роторную группу, после прохода внутренней полости переводника 4 промывочная жидкость поступает в рабочие камеры следукяцего героторного механизма. Пройдя внутренние полости всех имеюощхся в двигателе героторныз механизмов поток жидкости направляется к породоразрушающему инструменту и далее на забой скважины.
Вращающий момент ротора 3 предьщу- щего героторного механизма передается на ротор 3 последующего геротор- ного механизма с помощью гибкого вала 5. Моменты роторов 3 героторных механизмов суммируются и передаются на шпиндель (на фиг. 1 не показан) с помощью гибкого вала или шарнирног соединений.
Поток промывочной жидкости, поступающий в рабочие органы, создает вращакиций момент на роторе и реак- тивньй на статоре. Результатом действия давления жидкости на ротор является также перекашивающий момент осевая гидравлическая сила и т.д. Гидравлические силы, являясь внутренними силами относительно статора, вызывают перекос и прижатие ротора к статору. Их действие не распространяется на корпус статора или двига- теля.
Силами, вызывающими вибрацию корпуса, в основном, являются массовые инерционные силы Fj, прижиманнцие ротор к обкладке статора в зоне полюса зацепления. Их возникновение связано с кинематикой и принципом действия забойного винтового, двигателя.
Полное уравновешивание инерционных сил и их моментов, действующих на машину, достигается в секционном исполнении героторной машины, геро- торные механизмы которой последовательно соединены в блоки, количество которьпс может быть 1 и более. Каяиый из блоков содержит М модулей (М - любое целое число, начиная с 2 и более). В Свою очередь, модуль состоит, из 2 (рис. 5), 3 (рис. 6)
или N соосно расположенных статоров, внутри которых размещено соответствующее количество роторов (N - также любое целое число, начиная с 2 и более) . Оси указанных роторов находятся на окружности радиуса е с центром, совпадающим с осью модуля, при этом ось каждого последующего ротора относительно каждого предыдущего смещена
360
I У W f / J Рц л
360117П°
2
, 360°
чае d ---. Сами же модули повернуты N
друг относительно друга на угол р,
на угол d
о
120
180 (рис. 6)
(рис. 7); о1 или в общем слу360 .. .4 fl ЗбО -.(- 120 (рис.5);б -у-
(рис. 6) или в общем случае р
s
5
0
На фиг. 5 и 6 на схематичных поперечных сечениях героторныг механизмов отдельных модулей (I-I для модуля I, 11,11 - для модуля II и т.д.).показаны углы d и j3 между соответствующими роторами в различных модулях, а также взаимное расположение модулей друг относительно друга при установке их в блоке.
Если количество блоков в героторной машине 2 и более, сами блоки могут устанавливаться с безразличной ориентацией друг относительно друга.
Таким образом, предложенные схемы секционных забойных винтовых двигателей позволяют уменьшить и в большинстве вариантов полностью уравновесить инерционные силы и их моменты, что значительно снижает уровень вибрации корпуса и других элементов двигателя.
Фиг.1
Фиг.З
Фиг. If
« о
пГ
csT
4
CS
N
U-4.
te5i
l
tS
I-. §
(I
I
t
4 I
n
«
a
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гусман М.Т | |||
| и др | |||
| Забойные винтовые двигатели для бурения скважин | |||
| М.: Недра, 1981, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
