Изобретение относится к устройствам (машинам) для бурения скважин забойными двигателями.
Известен винтовой забойный двигатель (см. а.с. СССР №926208 или обзорную информацию "Винтовые героторные гидравлические машины", Д.Ф.Балденко, ЦНИИНТИ, серия ХМ-4, 1983, стр.25...27, рис.14в, 15) с несоосным ротором двигателя и нижерасположенным шпиндельным валом, соединенным между собой кинематически гибким валом, имеющим соотношение между его длиной и диаметром 10...60. Недостатком этого двигателя, особенно при использовании многошаговых рабочих органов с полым ротором, является чрезмерный поперечный прогиб длинного, расположенного в полом роторе двигателя гибкого вала из-за вибраций двигателя и сил инерции, приводящих к поперечным перемещениям гибкого вала относительно двигателя, к дополнительной знакопеременной нагрузке самого гибкого вала и смежных с ним элементов двигателя, поломкам, снижению надежности двигателя. При этом тенденция на удлинение винтовых рабочих органов осложнила и даже исключила применение гибких валов в этих двигателях. Недостаточная продольная устойчивость длинных гибких валов, вызывает необходимость увеличения диаметра (массы) гибкого вала, что усугубляет предыдущие недостатки (прототип).
Известен винтовой забойный двигатель (патент РФ №2185488) с эксцентричным, несоосным шпиндельному валу ротором, содержащий дополнительную радиальную опору, установленную на соединительной муфте шпинделя, связанной с ротором посредством узла их кинематического соединения, в частности посредством гибкого вала. Эта конструкция практически не предусматривает уменьшения динамических нагрузок и деформаций на узел кинематического соединения, а лишь их частичную локализацию.
Известен гидравлический забойный двигатель (патент РФ №1756525) с несоосным ротором и шпиндельным валом, соединенными гибким валом, имеющим увеличенный момент инерции в его средней части. Эта конструкция позволяет увеличить продольную устойчивость гибкого вала, но не решает задачу кардинального уменьшения динамических нагрузок на гибкий вал и смежные с ним узлы двигателя.
Известен забойный двигатель с несоосными ротором и шпиндельным валом, соединенными между собой валом-муфтой, снабженным в своей средней по длине части упругой радиальной опорой (см. патент РФ №1385685). Органическим недостатком забойного двигателя является то, что при работе двигателя вал-муфта по всей своей длине совершает переносное движение по окружности, радиус которой плавно уменьшается от эксцентриситета "е" в месте соединения с ротором до нуля в месте соединения со шпиндельным валом. То есть образуется центробежная (инерционная) сила, величина которой не зависит от наличия упругой радиальной опоры, которая функционально опорой не является, а служит лишь упругим передаточным элементом этой силы на корпус двигателя, препятствующей отвороту резьбы. Кроме того, следствием высокой жесткости вала-муфты является наличие больших перекашивающих сил, действующих на смежные с валом-муфтой элементы двигателя - опору, вал шпинделя, ротор двигателя.
Предлагаемое изобретение направлено на решение задачи предотвращения поломок гибкого вала и смежных с ним деталей двигателя от его поперечных деформаций за счет повышения продольной устойчивости, уменьшения отрицательного воздействия динамических и вибрационных нагрузок на гибкий вал, перекашивающих сил.
Решение указанной задачи достигается тем, что в забойном двигателе, включающем корпусные элементы со статором, роторные элементы с несоосными между собой ротором двигателя и нижерасположенным по ходу потока жидкости шпиндельным валом, кинематически связанные между собой гибким валом посредством концевых заделок, согласно предлагаемому техническому решению двигатель снабжен промежуточными радиальными опорами, обеспечивающими увеличение продольной устойчивости и ограничивающими радиальное (поперечное) перемещение гибкого вала относительно роторных элементов двигателя и/или его корпусных элементов в интервале нижней трети гибкого вала.
Кроме того, по крайней мере, одну из промежуточных радиальных опор целесообразно выполнять упругой с возможностью допущения регламентированного радиального смещения гибкого вала, смягчения динамических и вибрационных нагрузок.
На чертеже показан вариант двигателя в разрезе с несоосными ротором и шпиндельным валом, соединенными между собой кинематически гибким валом с установкой предлагаемых опор.
Двигатель содержит статор 1, внутренняя винтовая рабочая резиновая обкладка которого находится в зацеплении с наружной винтовой рабочей поверхностью ротора 2 с возможностью его планетарного вращения, т.е. центральные оси 3 и 4 соответственно статора 1 и ротора 2 не совпадают.
Ротор 2 и шпиндельный вал 5 также несоосны, т.е. их оси соответственно 4 и 6 также не совпадают. Эта несоосность является результатом указанного выше эксцентричного расположения ротора 2 относительно статора 1, а также искривления корпусных элементов, например, соединительного переводника 7 в двигателе-отклонителе.
Роторные элементы двигателя: ротор 2 и шпиндельный вал 5 соединены между собой кинематически гибким валом 8 посредством полумуфт 9 и 10 соответственно с верхней частью полого ротора 2 и шпиндельным валом 5.
Вышеперечисленные роторные элементы и другие элементы, скрепленные с ними, образуют систему ротора.
Полумуфты 9 и 10 согласно теории продольной устойчивости являются жесткими концевыми заделками (кинематическими связями) гибкого вала, как гибкого стержня, ограничивающими поперечно-линейные и угловые перемещения концов гибкого вала.
Отличительной особенностью двигателя является наличие в нем промежуточных радиальных опор (промежуточных кинематических связей), повышающих продольную устойчивость гибкого вала, а именно промежуточных радиальных опор 11, центрирующих гибкий вал 8 относительно других элементов системы ротора. В данном варианте они расположены в расточке ротора 2 винтового двигателя. Кроме того, двигатель снабжен промежуточной радиальной опорой (кинематической связью) 12, закрепленной в корпусном элементе, а именно в соединительном переводнике 7, и ограничивающей возможность радиального перемещения (поперечного прогиба) гибкого вала 8 относительно системы корпуса в нижней трети 13 общей гибкой части 14 гибкого вала 8. (Корпусными элементами являются статор 1, корпус шпинделя 19 и другие элементы двигателя, например соединительный переводник 7, скрепленные между собой в систему корпуса). Для повышения износостойкости при расположении опор 12 в корпусных элементах гибкий вал целесообразно оснастить втулкой радиальной опоры 15. Крепление промежуточных радиальных опор 11, центрирующих гибкий вал 8 относительно роторных элементов двигателя, осуществляется или на гибком валу, или в роторных элементах двигателя, например в полом роторе 2.
Гибкий вал 8 может центрироваться промежуточными радиальными опорами (кинематическими связями) относительно отцентрированных в корпусных элементах роторных элементов двигателя: в полом валу 5 нижерасположенного шпинделя, полом валу вышерасположенной турбинной двигательной секции (на чертеже не показаны) и/или в скрепленных с ними элементах. Причем, указанные валы в свою очередь отцентрированы относительно корпуса двигателя радиальными опорами (радиальными подшипниками). Так, на чертеже показана промежуточная радиальная опора 16 (кинематическая связь), расположенная в элементе системы ротора, а именно в полом удлинителе 17, скрепленном с полумуфтой 10 шпиндельного вала 5, который отцентрирован относительно корпусного элемента, а именно корпуса шпинделя 18, радиальными опорами (радиальными подшипниками) 19.
Как вариант исполнения возможно соединение одного или обоих концов гибкого вала не жесткими заделками (полумуфтами 9 и 10), а шарнирными соединениями, т.е. заделками (кинематическими связями), допускающими угловое перемещение концов гибкого вала относительно ротора 2 двигателя и шпиндельного вала 5.
Количество, месторасположение, вид, жесткость (упругость) промежуточных опор 11, 12, 16 устанавливается выбором оптимальных вариантов на основе расчета деформаций и напряжений в гибком валу как статически неопределимой балки с учетом действия центробежных сил инерции. Оптимальные варианты проверяются на продольно-поперечную устойчивость и уточняются по результатам работы двигателей.
Отличительная особенность работы предлагаемого забойного двигателя заключается в том, что при вращении роторной системы промежуточные радиальные опоры 11, 12, 16 (кинематические связи) гибкого вала 8 предотвращают неконтролируемое, взаимообусловленное нарастание поперечного прогиба гибкого вала 8 и сил инерции, а следовательно, и напряжений в гибком валу 8. Опоры как закрепленные в корпусных элементах (опора 12), так и в роторных элементах, скрепленных со шпиндельным валом, например, в полом удлинителе 17 (опора 16) или с отцентрированным в корпусе турбинным валом (на чертеже не показана), практически полностью предотвращают образование инерционных сил, действующих на смежные с ним элементы, таких как удлинитель 17, полумуфту 10, вал 5 шпинделя, опору 19, а также переводник 7. Опоры 11, центрирующие гибкий вал 8 относительно ротора 2 винтового двигателя и жестко скрепленных с ним элементов, не исключают действие инерционных сил, так как ось 4 ротора 2 движется по окружности с радиусом, равным эксцентриситету, т.е. расстоянию между осью 3 статора 1 и осью 4 ротора 2, однако они предотвращают взаимообусловленный неконтролируемый рост поперечных деформаций и инерционных сил, а следовательно, напряжений в гибком вале 8 и инерционной нагрузки на резиновую обкладку статора 1.
При использовании промежуточных радиальных опор 11 гибкого вала устраняется нежелательный эффект спиралеобразной деформации гибкого вала 8, т.е. отставание по фазе поперечных прогибов нижней части вала 8 от его верхней части.
Продольная устойчивость гибкого вала в первом приближении увеличивается обратнопропорционально квадрату расстояния между промежуточными опорами 11, 12, 16. Поэтому, при установке даже одной промежуточной радиальной опоры продольная устойчивость гибкого вала увеличивается при работе двигателя в 2...4 раза. При этом соотношение lсв/d между свободной длиной lсв гибкого вала и ее диаметром d можно выдерживать в интервале 30...45, т.е. (см., например, график, приведенный в прототипе) иметь оптимальные комбинации значений жесткости, поперечной силы, запаса устойчивости и напряжений в гибком вале.
Варьируя количеством промежуточных радиальных опор гибкого вала, можно уменьшать его диаметр, минимизировать отрицательное влияние массы гибкого вала на поперечные вибрации двигателя, улучшить энергетическую характеристику двигателя.
При бурении на собственные вибрации винтового двигателя, вызванные неуравновешенной массой его ротора, налагаются зубковые вибрации долота. Для снижения отрицательного ударного воздействия зубковых вибраций в их высокочастотном спектре на опоры 11, 12, 16 двигатель целесообразно оснащать упругими промежуточными радиальными опорами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХШАРНИРНЫЙ КАРДАННЫЙ ВАЛ ЗАБОЙНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2407877C1 |
| ДВУХШАРНИРНЫЙ КАРДАННЫЙ ВАЛ ЗАБОЙНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2411335C1 |
| РАДИАЛЬНАЯ ОПОРА ЗАБОЙНОГО ДВИГАТЕЛЯ | 1999 |
|
RU2151850C1 |
| ШПИНДЕЛЬ ЗАБОЙНОГО ДВИГАТЕЛЯ | 2006 |
|
RU2319823C2 |
| ШПИНДЕЛЬ ЗАБОЙНОГО ДВИГАТЕЛЯ | 1998 |
|
RU2137896C1 |
| МНОГОШАГОВЫЙ ВИНТОВОЙ ДВИГАТЕЛЬ | 1994 |
|
RU2075589C1 |
| СТАТОР ЗАБОЙНОЙ ГЕРОТОРНОЙ МАШИНЫ | 1992 |
|
RU2018620C1 |
| ПЕРЕЛИВНОЙ КЛАПАН ЗАБОЙНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2407876C1 |
| Гидравлический забойный двигатель | 1990 |
|
SU1756525A1 |
| КЛАПАН БУРОВОЙ ЦИРКУЛЯЦИОННЫЙ | 2010 |
|
RU2426862C1 |
Изобретение относится к области буровых забойных двигателей. Двигатель включает корпусные элементы со статором двигателя, роторные элементы с несоосными между собой ротором двигателя и шпиндельным валом, кинематически соединенные друг с другом посредством концевых заделок гибким валом. Двигатель имеет промежуточные радиальные опоры, обеспечивающие увеличение продольной устойчивости гибкого вала, ограничение его поперечного прогиба относительно роторных элементов двигателя и/или относительно его корпусных элементов. Обеспечивает повышение продольной устойчивости гибкого вала, ограничение поперечных прогибов, предотвращение систематических поломок гибких валов и взаимодействующих с ним элементов, возникает возможность уменьшения диаметра, (т.е. массы) гибкого вала, что обеспечивает уменьшение вибраций двигателя, величину перешивающих сил, улучшение энергетической характеристики двигателя, его работоспособности. 1 з.п. ф-лы, 1 ил.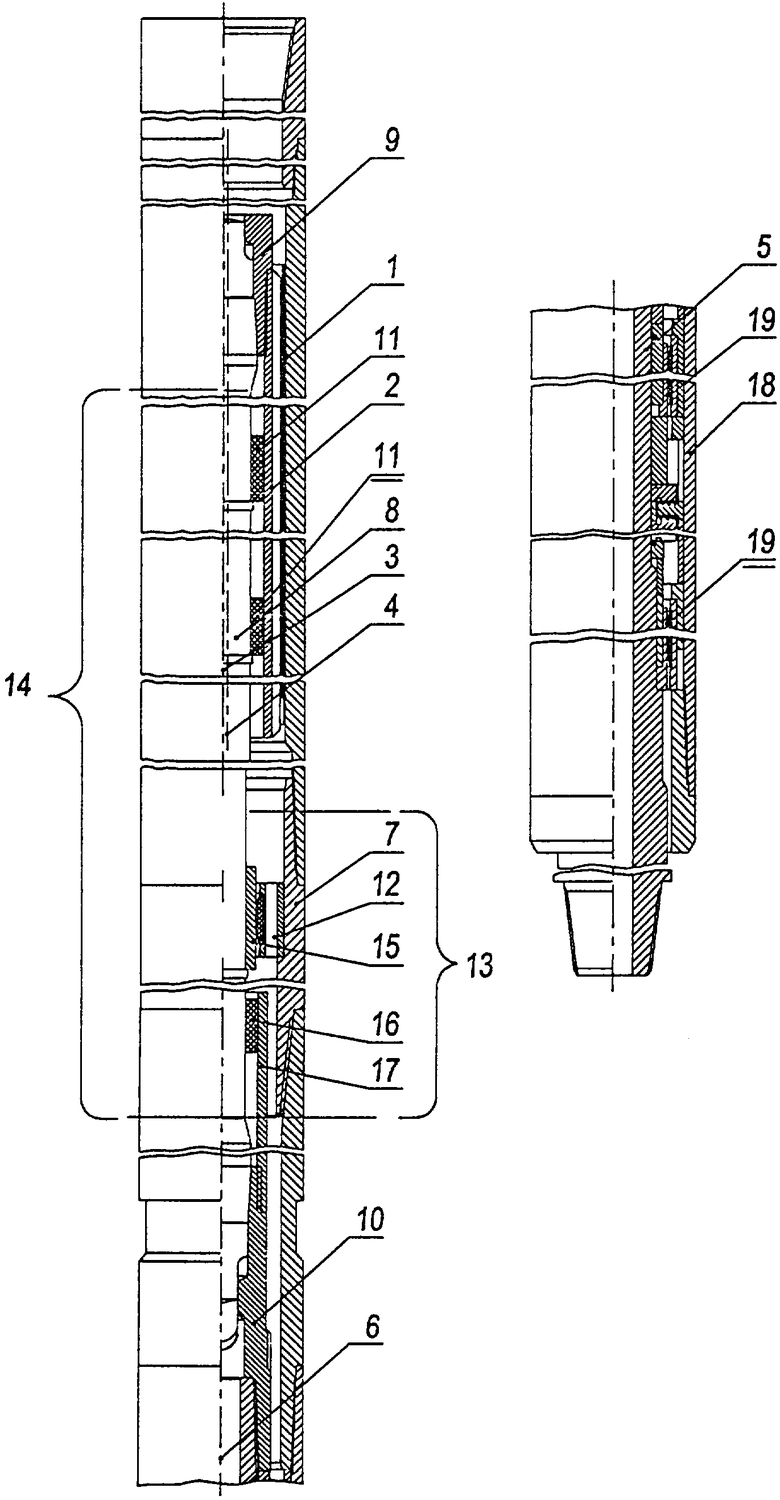
| Винтовой забойный двигатель | 1979 |
|
SU926208A1 |
| Устройство для бурения направленных скважин | 1979 |
|
SU890989A3 |
| Сканирующее устройство для неразрушающего контроля цилиндрических полостей | 1980 |
|
SU911308A1 |
| Героторная машина | 1983 |
|
SU1384702A1 |
| SU 1385685 А1, 10.12.1997 | |||
| Гидравлический забойный двигатель | 1990 |
|
SU1756525A1 |
| ВИНТОВОЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2185488C1 |
| ВИНТОВОЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2187615C1 |
| Устройство для автоматического управления электродом при электролечении | 1931 |
|
SU29552A1 |
| US 4909337 A, 20.03.1990 | |||
| БАЛДЕНКО Д.Ф | |||
| и др | |||
| Винтовые забойные двигатели | |||
| - М.: Недра, 1999, с.69-71, 268-271. | |||

