Изобретение относится к измерит тельной технике и может быть использовано при контроле параметров вибра .ционного поля, возбуждаемого в меха- нических конструкциях работающими механизмами, машинами или иными ис- -точниками вибраций, например, в системах активной компенсации вибраций.
Цель изобретения - сокращение времени, затрачиваемого на размещение датчиков в наиболее информативных точках контроля.
На чертеже изображена функцио- нальная схема возможного варианта устройства, реализующего способ.
Устройство, реализующее способ, содержит датчики 1.1-1.К, блоки 2.1-2.К определения дисперсии, блоки 3.1-3.К выбора максимума, блоки 4,2- -4.К определения коэффициента корреляции, блоки 5.2-5.К деления, блоки 6.2-6.К з ножения и блоки 7.2-7.К вычитания.
Способ осуществляют следующим образом.
Первый датчик 1.1 последовательно перемещают по механической конструкции и для каждого его положения определяют дисперсию его сигнала Si.(t) с помощью блока 2.1 определения дисперсии. Выбирают максимальное значение дисперсии с помощью блока 3.1 выбора максимума и закрепляют датчик
в точке, где дисперсия максимальна, Т , .
Второй датчик 1.2 последовательно перемещают по механической конструкции и для каждого его положения выделяют ортогональную составляющую ) его сигнала ) по отношению к сигналу S,(t) первого датчика 1.1:
s;(t) S(t) - - -S.Ct),
где Р,- коэффициент корреляции сигналов s,(t) и SjCt); „ - дисперсия сигнала S,(t). Для выполнения, этой операции определяют : коэффициент JJ,2 корреляции сигналов S,Ct} и ) с помощью блока 4.2 определения коэффициента корреляции, определяют отношение коэф- фкциента J,2 корреляции: и дисперсии f,, сигнала S, (t) с помощью блока 5.2 деления. С помощью блока 6.2 умножения и блока 7.2 вычитания выделяют ортогональную составляющую- SjCt) сигнала S(t). Затем определяют дисперсию ортогональной составляющей В(t) сигнала второго датчика 1.2 с помощью блока 2.2 определения дисперсии и находят максимальное значение дисперсии с помощью блока 3.2 выбора максимума. Затем закрепляют второй датчик 1.2 в точке, где дисперсия максимальна. Аналогичным образом поступают с каждым последующим датчиком.
Пусть закреплены датчики с первого до (k-1)-ro. К-й датчик Г. К последовательно перемещают по механической конструкции и для каждого его положения выделяют ортогональную составляющую- ) его .сигнала S(t) по отношению к сигналам ), ), ,.., S, (t) закрегашнных датчиков по правилу
К-(
s ,(t) s,(t) - Ц sL(t),
li
/pp
5
О
5
0
5
0 5
izn Рк 1К КОЭФФИ- циенты корреляции сигналов.
;s (t)s,(t),sj,(t),...su(t)
с сигналом S)(t);
: (i , fk-i x-i дисперсии сигналов S(t), ), ..., S KH (t).
Для выполнения этой операции о.п- ределяют;. коэффициенты f, f2к,-(f-I/ .корреляции сигналов S|Ct) , ) ,...., ..., S , (t) с сигналом S(t) с .помощью блоков 4.К определения коэффициента корреляции. Определяют соответствующие отнощения коэффициентов Г (К } У 24
корреляции к дисперсиям V« ,
Vfj . . f ц.(. ., с помощью блочков 5.К деления. С помощью блоков 6.К умножения и блоков 7.К вычитания выделяют ортогональную составляющую S j(t) сигнала S(t) k-ro датчика, затем определяют дисперсию ортогональной составляющей S (t) сигнала k-ro датчика 1.К с помощью блока 2.К определения дисперсии и находят максимальное значение дисперсии с помощью.блока З.К выбора максимума.. После чего закрепляют k-й датчик 1.К в точке, где дисперсия максимальна. Так продолжают до тех пор, пока дисперсия ортогональной составляющей сигнала очередного датчика по отношению к сигналам размещенных датчиков не будет меньше наперед заданного значения, либо число размешенных датчиков не достигнет заданной величины.
Формула изобретения
Способ размещения датчиков системы измерения вибрационного поля, заключающийся в том, что устанавливают в сеточных точках датчики и измеряют коэффициенты корреляции их .сигналов, отличающийся тем, что, с целью сокращения времени, затрачиваемого на резмещение датчиков в
наиболее информативных точках контроля, перемещают первый датчик, определяют дисперсию его сигнала и зак-.. репляют его в точке, где дисперсия максимальна, перемещают каждый последующий датчик и для каждой точки его расположения выделяют ортогональную составляющую его сигнала по отношению к сигналам всех закрепленных датчиков, определяют дисперсию ортогональной составляющей его сигнала и закрепляют этот датчик в точке, где дисперсия максимальна.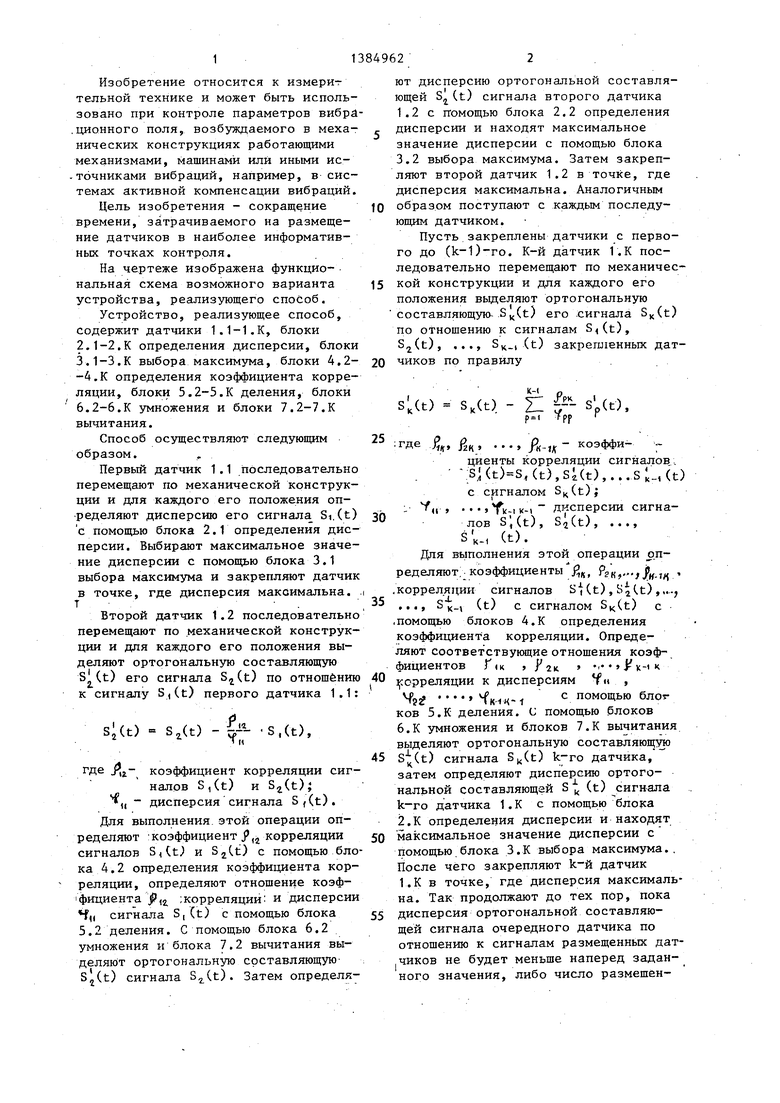
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ ПОБОЧНОГО ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ОТ ЭЛЕМЕНТОВ СРЕДСТВ ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ | 2015 |
|
RU2617453C1 |
| СПОСОБ МНОГОУРОВНЕВОЙ ВИБРОСЕЙСМОРАЗВЕДКИ | 2000 |
|
RU2169382C1 |
| СПОСОБ РЕГИСТРАЦИИ МАЛОШУМНОГО МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2572052C2 |
| СПОСОБ ДИАГНОСТИКИ ФОРМООБРАЗОВАНИЯ ПРИ СВАРКЕ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2127177C1 |
| СПОСОБ ДИАГНОСТИКИ ИНДУКЦИОННОЙ ПАЙКИ | 1998 |
|
RU2132262C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ВОЗМОЖНОСТИ ВОЗНИКНОВЕНИЯ ЦУНАМИ И ОПРЕДЕЛЕНИЕ ЕГО ЭПИЦЕНТРА | 2005 |
|
RU2300787C2 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2023 |
|
RU2824054C1 |
| СПОСОБ ДИАГНОСТИКИ КОНТАКТНОЙ СВАРКИ | 1998 |
|
RU2133179C1 |
| Устройство для определения параметров электромиограммы | 1989 |
|
SU1717104A1 |
| Способ измерения скорости движения протяженных объектов | 2023 |
|
RU2803031C1 |
Изобретение относится к измерительной технике и может быть использовано при контроле параметров вибрационного поля, возбуждаемого в механических конструкциях работающими механизмами, машинами или иными источниками вибраций, например в системах активной компенсации вибраций. Цель изобретения - сокращение времени, затрачиваемого на размещение датчиков в наиболее информативных точках контроля. Цель достигается тем, что каждый следующий датчик перемещают в вибрационном поле до тех пор, пока дисперсия составляющей его сигнала, ортогональной к сигналам всех предьщущих датчиков, не достигнет максимального значения, после чего датчик закрепляют в этом положении. 1 ил. в
| Кузьма В.М | |||
| Оптимизация измерений случайных колебаний | |||
| Киев: Зна- | |||
| кие, 1976, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
