Изобретение относится к медицинской технике, в частности к устройствам автоматизации проведения психофизиологических и медикобиологических исследований, основанных на измерении различных характе- ристик электромиограмм человека.
Наиболее близким к изобретению по технической сущности и достигаемому результату является челюстной электромиограф 2. Однако он позволяет измерять лишь временные интервалы без выделения различных временных составляющих миог- раммы, не выделяет ее энергетические параметры, что снижает его функциональные возможности.
Цель изобретения - повышение достоверности диагностики за счет определения дополнительных информативных параметров и унификации условий регистрации электромиограммы.
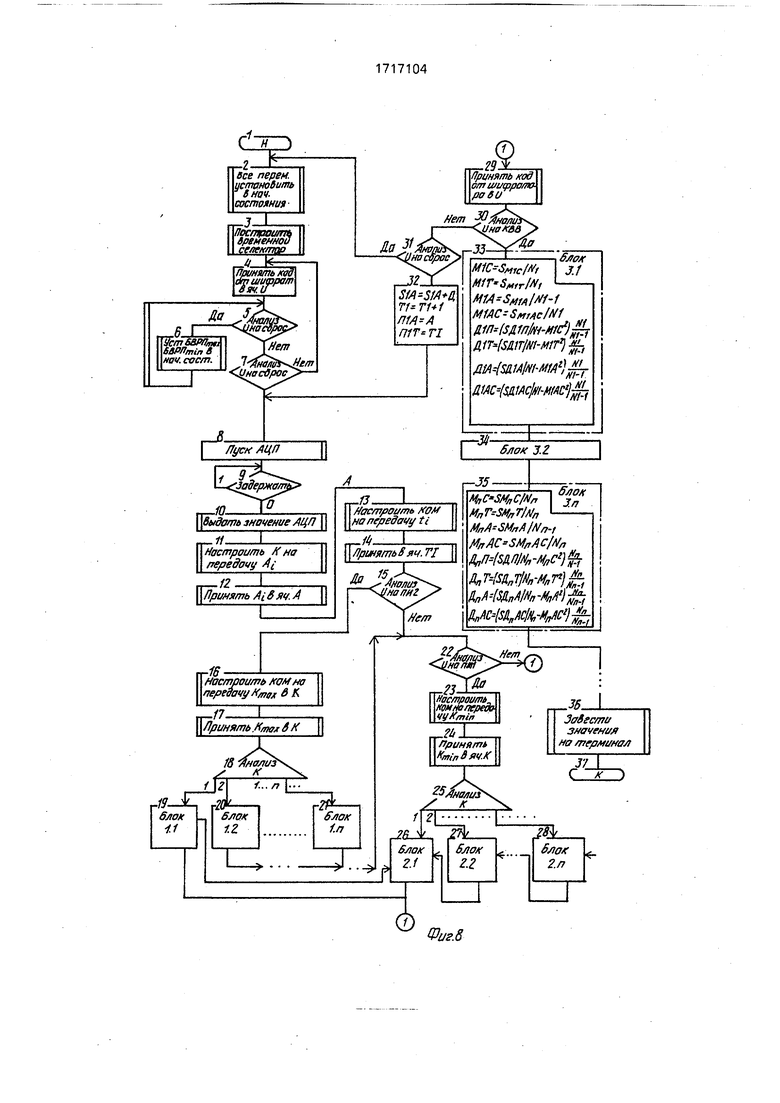
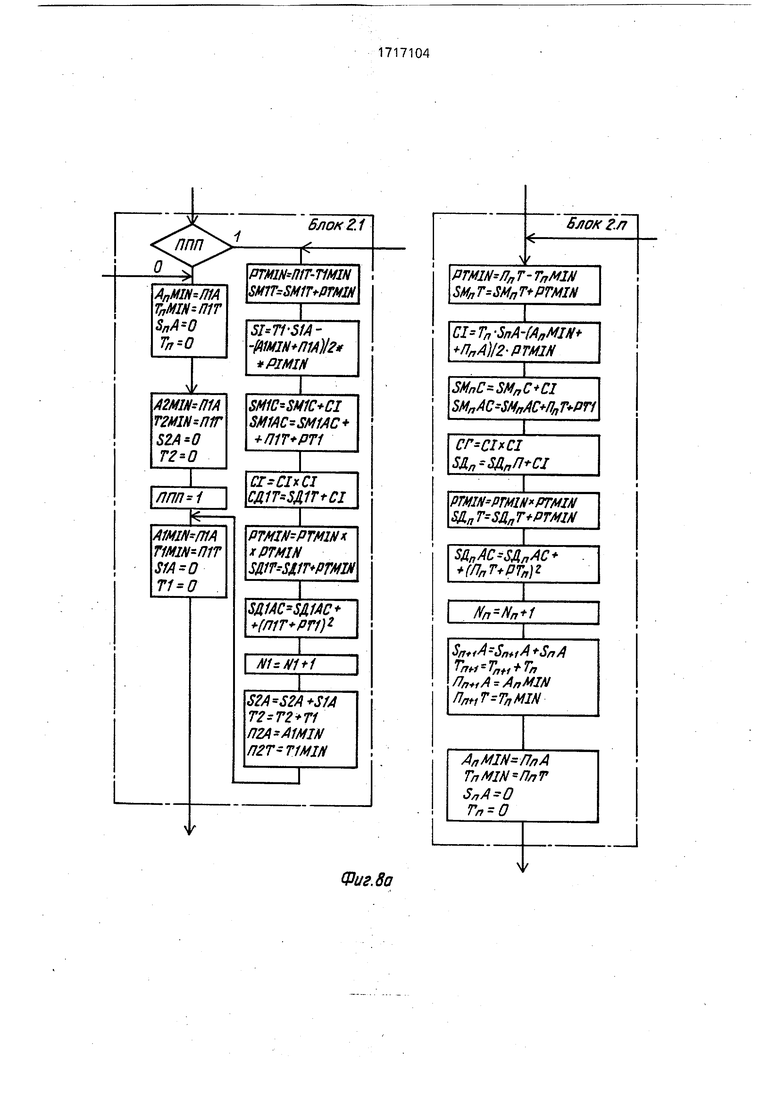
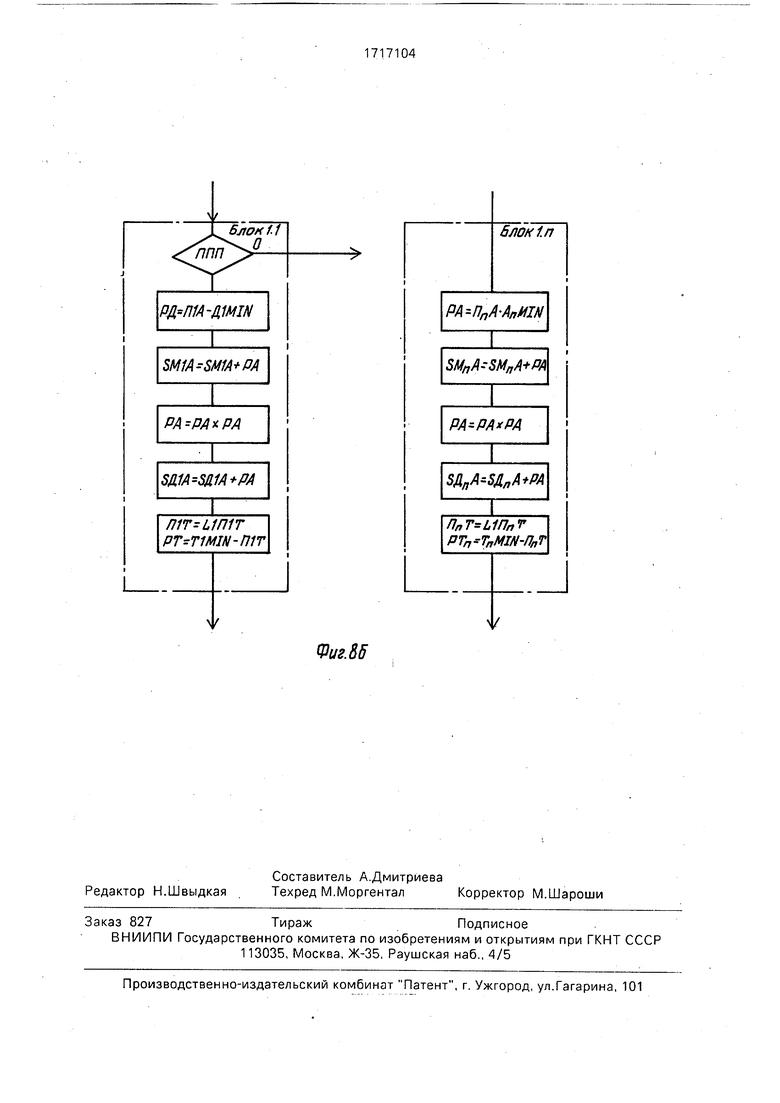
На фиг. 1 представлена структурная электрическая схема устройства; на фиг. 2 - диаграмма ранжирования входного сигнала электромиограммы; на фиг. 3 - схема формирования характеристик первого ранга разложения электрофизиологического сигнала (электромиограммы); на фиг. 4 - схема формирования характеристик второго ранга разложения электрофизиологического сигнала (электромиограммы); на фиг. 5схема построения динамических характеристик для двух рангов разложения электрофизиологического сигнала; на фиг. 6 - структурная схема устройства; на фиг. 7 - структурная схема вычислительного блока; на фиг. 8, 8а, 86 - блок-схема алгоритма работы вычислительного блока.
Устройство для определения параметров электромиограммы содержит последовательно соединенные датчик 9 электромиограммы и первый усилитель 10, последовательно соединенные второй усилитель 2 и первый пороговый элемент 4, делитель 3 напряжения, первый вход которого подключен к второму входу первого порогового элемента 4, вычислительный блок 11, датчик 1 усилий, подключенный к входу второго усилителя 2, и последовательно соединенные второй пороговый элемент 5, амплитудный селектор 6, временной се- лектор 8 и блок 7 управления, второй вход которого соединен с выходом первого порогового элемента 4, первый вход которого подключен к первому входу второго порогового лемента 5, второй вход которого соеди- нен с вторым выходом делителя 3 напряжения, причем первые выходы блока 7 управления подключены соответственно к первым входам вычислительного блока 11, вторые входы которого соединены соответственно с вторыми выходами временного селектора 8, вторые входы которого подключены соответственно к вторым выходам блока 7 управления, первый вход которого соединен с третьим входом вычислительного блока 11, четвертый вход которого подключен к выходу первого усилителя 10, а выходы подключены соответственно к третьим входам временного селектора 8.
Устройство регистрирует следующие параметры электромиограммы: 1. Средняя площадь под кривой ЭМГ
МС
i о,п ,
(1)
minmln
,|(,)-A -H+A j 12
x(f,T+i -гТГ),
где С| - площадь под текущей волной, заключенная между огибающей сигнала и линий, соединяющей точки i-ro и i + 1-го минимумов;
AIJ(T) - амплитуда сигнала для участка между i-м и i+1-м минимумами для дискреты с номером j;
Aimln и Ai+imln - амплитуда минимумов сигнала.для i-ro и i+1-fo минимумов;
tT,imin и TT,i+imin -текущее время появления i-ro и i+1-го минимумов;
т- частота дискретизации ЭМГ;
j - текущий номер дискреты на участке; между двумя соседними минимумами;
п - количество минимумов ЭМГ на вычисляемом участке;
i ТТп - номер минимума ЭМГ на вычисляемом участке. 2. Средняя длительность волны
1
мт - 2 (tfjp+i -tTmin). n i 1
(3)
3. Средняя амплитуда сигнала
МА - 2 (АГ -АР1 1), (4)
n i 1
где Ajmax - амплитуда максимума сигнала между минимумами с номерами i и i+1. 4. Средняя асимметрия сигнала
MAC -1- Ј (V№+1 - ТтТ - ) , (5) n i 1
где tT,imax -текущее время появления максимума между i-м и i+1-м минимумами.
5. Дисперсия среднего значения площади под кривой ЭМГ
(т,1,с -мс2 - (6)
6.Дисперсия средней длительности волны
(( -мт2). 00.
7.Дисперсия средней амплитуды
(-L Ј (АГ -АГ)2- п - 1 n | 1
-МА2).(8)
8.Дисперсия асимметрии
- 2 ( + . n - i n i 1
- 2 trT )2 - MAC2).(9)
Вышеперечисленные параметры могут быть получены с использованием следующего математического парамета, называемого методом рангового анализа по точкам переключения.
В соответствии с данным методом вычисления искомых параметров осуществляются на основе выделения из исследуемого сигнала специальных опорных точек, которые в дальнейшем используются как точки отсчета для вычислительных процедур, связанных с получением информативных признаков. В качестве опорных точек (точек отсчета) могут использоваться точки перегибов, нарушения монотонности, нарушения минимумов и максимумов, точки переключений и разрывов. Для электрофизиологиче- ских процессов наибольший интерес представляют точки минимумов и максимумов.
Для выполнения операции ранжирования сигналов по его временным составляющим вводится оператор переключения % для которого j определяется как порядковый номер переключения k для точек отсчета k-ro ранга. Ранги определяются и упорядочиваются по номеру скоростных составляющих, образующих исследуемый процесс. Точки отсчета первого ранга формируются после обработки оператором переключения исходного сигнала (), а точки отсчета каждого последующего ранга - при применении оператора переключения к точкам переключения предыдущего ранга.
Заканчивается ранжирование либо исчерпыванием точек переключения на оче- редном шаге ранжирования, либо после выхода за пределы информативности исследуемых показателей с точки зрения целей решаемой задачи.
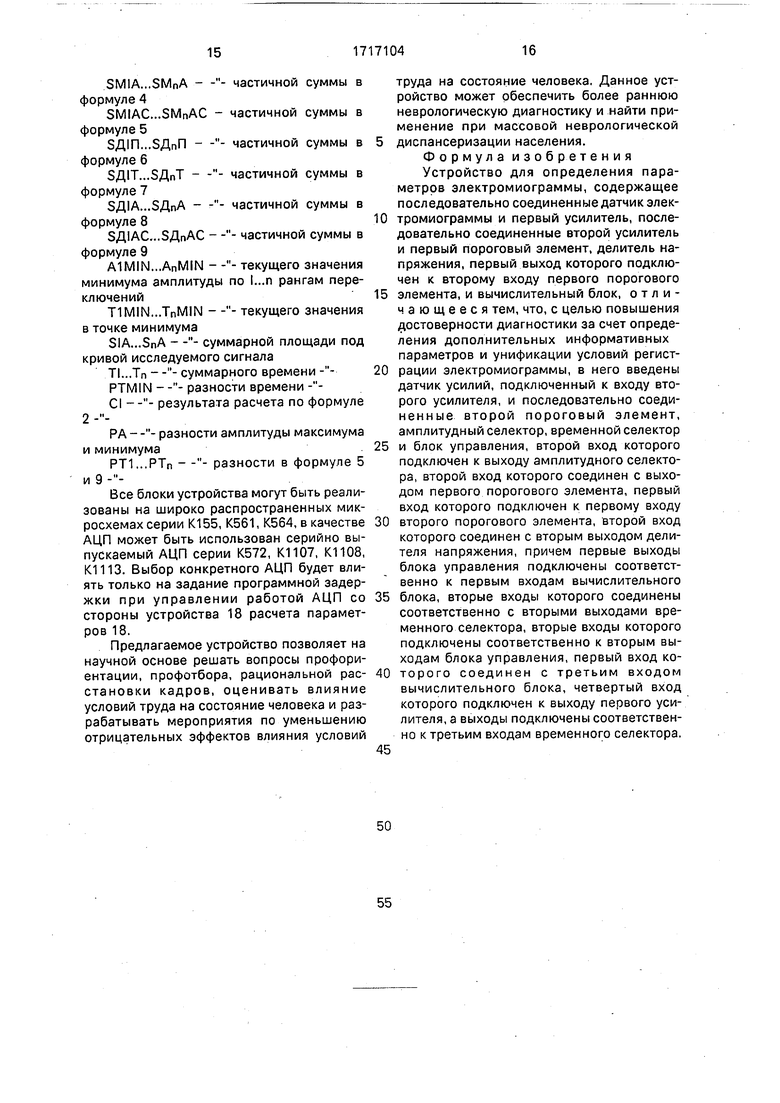
На фиг. 2 показан пример ранжирова- ния сигнала оператором переключения % по минимуму после предварительной его дискретизации, что характерно для цифровых систем обработки информации.
Результатом дискретизации сигнала X(t) является получение решетчатой функции
00
Yjo(t) X(t) Ј d(t-lT) i 0
где i - номер дискреты, а т- период дискретизации.
; 1 ДЛЯ t I Т
д (t - i т) % (Одляг т.
Из фиг. 2 видно, что точки отсчета первого ранга Yji(t) получены из дискретизован- ного исходного сигнала Yjc(t) путем
выделения всех его локальных минимумов. Точки отсчета второго ранга Yja(t) получены путем выделения всех локальных минимумов из точек отсчета первого ранга Yji(t) и т.д.
Аналитически оператор переключения может быть представлен выражением
(1 при наличии переключения % -j; в k-м ранге (.0 при отсутствии переключения
т.е. оператор % опрделен только в моменты переключения сигнала или его рангов.
Для рассматриваемого примера оператор переключения по минимуму определяется выражением
(1, если (YH,k(t) YJ, ОД)д (Yj+i,k(t) Yj,k(t))
0, если (Yj-i,k(t) Yj,k(t))i/(YH-i,k(t) Yj,k(t))
Выражение для j-x элементов решетча- той функции k-ro ранга определяется следующим образом:
Yj,k(t) Yj-i,k(t) fy.
Для наглядности на фиг. 2 вершины решетчатой функции соединены прямыми линиями.
Моменты времени переключения для исследуемого сигнала и его рангов определяется по формуле
tj.k i 7 #j,k
Полученные двойки {Yj,k(t), tj,k} будут в дальнейшем использоваться как точки отсчета для j-ro участка k-ro ранга при постро- ении различных характеристик . отражающих те или иные свойства исследуемого сигнала. Динамические свойства изучаемых характеристик удобно описывать с помощью элементарных ступенчатых функций
0.k(t) V
,k (t) ПРИ tj.k t tj+1,k
О при tj+,k t tj,k
путем введения зависимости
ИДО,
где j,k(t)- величина функции исследуемой характеристики, вычисляемая для каждого участка каждого ранга.
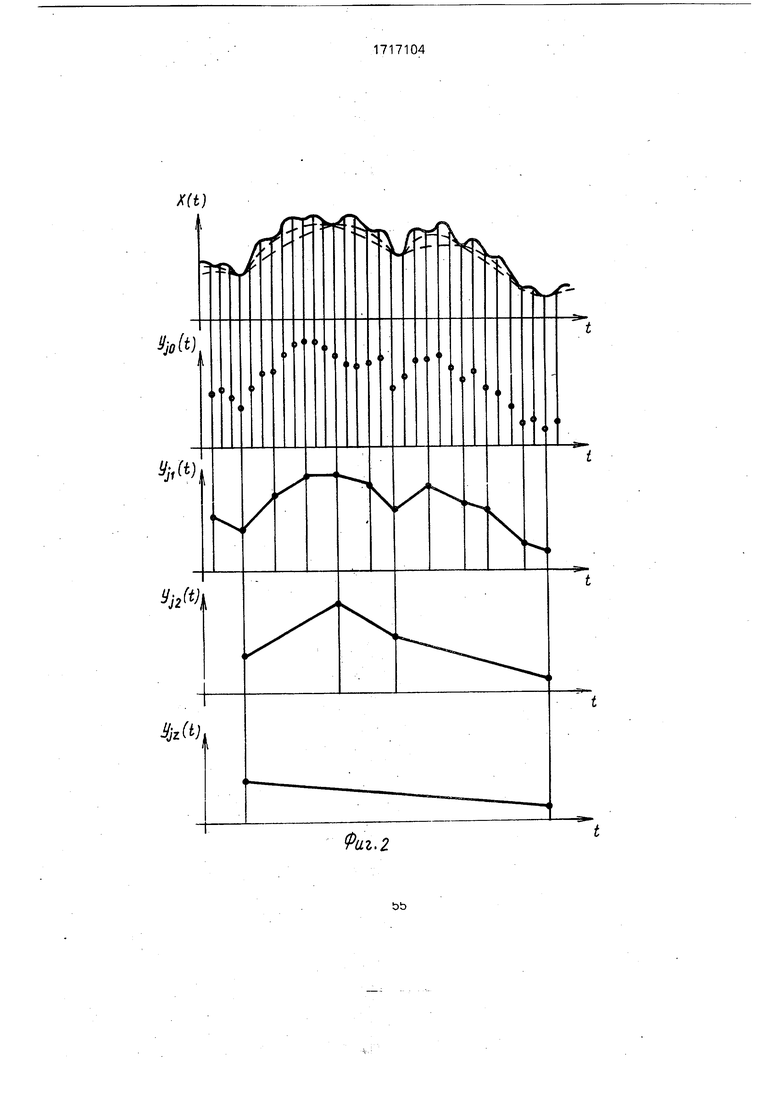
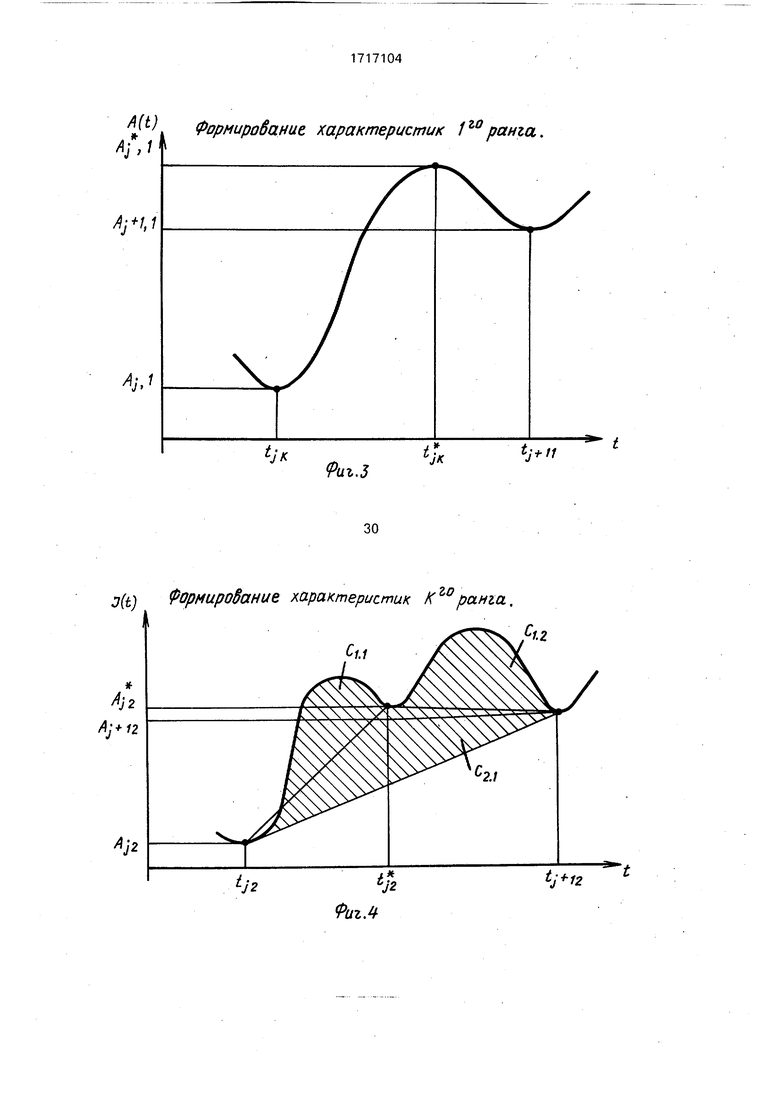
На фиг. 3 и 4 показаны способы формирования различных характеристик для первого и k-x рангов (на примере второго ранга). Для примера в рассмотрении будут участвовать две характеристики, используемые для исследования ЭМГ: средняя длительность волны (МТ и МС) и средняя площадь под кривой ЭМГ.
1.Средняя длительность волны (МТ)(пе- риодометрическая характеристика) согласно описанной выше теории может быть описана следующими формулами:
ftj+i,k-tj,k, если tj. tk+u Tj.k -)
( 0, если tj-n,k . t tj,k
1 °°
и МТ - У Tj.k n
2.Средняя площадь под кривой (МС) (планометрическая характеристика) описана следующими формулами
. л , Afh.k +AjT 2 Aj.i(t)-n-
.
(tj+u - tj,k), при tjk t tj+u Q.k j
L 0
00
, при tj+u t tj.k
и 2 Cj.k. n
На фиг. 5 приведены примеры получения графиков динамических характеристик МТ и МС для двух рангов разложения сигнала x(t). Заштрихованная фигура иллюстрирует пример формирования участка планометрической динамической характеристики второго ранга. Из фиг.5 видно, что эти графики достаточно наглядно отражают процесс изменения во времени исследуе0 мых характеристики по их разложениям. Вычитание трапеции при расчете планометрической характеристики из общей площади, ограниченной исследуемым сигналом, позволяет избавиться от влияния на резуль5 тат вычислений дрейфа изолинии.
Аналогичным образом могут быть представлены и все другие параметры ЭМГ, перечисленные выше.
Устройство работает следующим обра0 зом.
В качестве датчика 1 усилий используется динамометр Розенблата, в который встроен переменный потенциометр, соединенный с упругим элементом, приводящим
5 в движение стрелку динамометра. Таким образом, напряжение, снимаемое с потенциометра пропорционально величине усилия, прикладываемого к динамометру. В качестве датчика 9 электромиограмм может быть
0 использован практически любой серийно выпускаемый электромиограф.
Перед началом исследования испытуемый получает инструкцию приложить максимально возможные усилия к источнику
5 усилий (сжать грушу динамометра) в датчике 1 усилий (фиг.б). Экспериментатор по регистрирующему прибору этого же датчика 1 снимает показания максимального усилия Fmax и рассчитывает величины верхней и
0 нижней границ (FB 0,75 Fmax и FH (0,15-0,2) х х Fmax). По этим показаниям настраивается амплитудный селектор 6 следующим образом. Источник усилия удерживается с усилением, равным рассчитанной нижней
5 границы FH. Величина усилия фиксируется по регистрирующему прибору. Потенциометры RI и Ra делителя 3 напряжения выводятся в среднее положение, что при задании FH обеспечивает зажигание лампочки Лт.
0 Постепенным увеличением (уменьшением) величины потенциометра нижней границы R2 добиваются потухания лампочки /h амплитудного селектора 6. Это обеспечивает выставление порога на втором пороговом
5 элементе 5, сооветствующего нижней границе усилия. При этом на выходе второго порогового элемента 5 формируется сигнал логического нуля, который закрывает элемент И амплитудного селектора 6. Потухание лампочки /Н амплитудного селектора б
говорит о том, что он настроен на нижнюю границу усилия.
Для настройки амплитудного селектора 6 по верхней границе усилия к источинку усилия датчика 1 усилий прикладывается усилие, соответствующее рассчитанной верхней границе FB. Величина усилия фиксируется по регистрирующему прибору (РП) датчика 1. При этом несмотря на то что на выходе второго порогового элемента 5 логическая единица, лампочка Лт амплитудного селектора 6 погашена, поскольку потенциометр RI делителя 3 напряжения выставлен в среднее положение, что соответствует 30- 60% Fmax. Поворотом ручки потенциометра добиваются загорания лампочки /И, что обеспечивается изменением порога срабатывания первого порогового элемента 4, на выходе которого появляется сигнал логического нуля, который, инвертируясь элементом НЕ амплитудного селектора 6, открывает элемент И, на выходе которого вырабатывается сигнал логической единицы. На этом настройка амплитудного селектора 6 считается законченной.
По окончании настройки амплитудного селектора 6 в работу по команде устройства расчета параметров 1В (фиг.7) включается вчислительный блок, работающий по программе, блок-схема алгоритма которой представлена на фиг.8. В частности, он отрабатывает блоки 1-5, 7,8, в результате чего все ячейки памяти, участвующие в расчете параметров электромиограмм устанавливаются в исходное состояние, в регистр временного селектора 8, (фиг.6), загружается величина временных ворот и в ячейку памяти с именем U принимается код всех внешних признаков, поступающих в блок 11 по входам 1 и 3. Поскольку на начальном этапе все внешние признаки отсутствуют, вычислительный блок 11 переходит в режим ожидания входных сигналов Сброс (по первому входу) и Пуск (по второму входу), а поскольку их нет, то циклически выполняются блоки 5 и 7 блок-схемы на фиг. 8, чем и обеспечивается режим ожидания. После выполнения указанных операций устройство настроено на работу.
Испытуемый получает инструкцию прикладывать к источнику усилий датчика 1 усилий усилие, равное FCp (FB + Рн)/2, и удерживать это усилие в амплитудных воротах, визуально себя контролируя либо по регистрирующему прибору датчика 1 усилий, либо по состоянию лампочки /И амплитудного селектора 6 (если усилие находится в амплитудных воротах, то лампочка Лт горит). Измерение и расчет параметров электромиограмм начинается после последовательного нажатия кнопок Сброс и Пуск блока 7 управления.
По нажатию кнопки Сброс (КС) через второй элемент ИЛИ блока 7 управления
триггер устанавливается в нулевое состояние и лампочка Л2 погашена. Через третий элемент ИЛИ блока 7 управления на первый вход блока 11 подается сигнал Сброс, при анализе которого последний устанавливает
свои блоки в начальное состояние (блок 6, фиг. 8). Через элемент ИЛИ временного селектора сигнал от кнопки Сброс устанавливает в нулевое состояние счетчика временного селектора 8. Таким образом,
все устройство готово к работе.
По нажатию кнопки Пуск (КП) в блоке 7 управления триггер устанавливается в состояние 1, чем поджигается лампочка Л2 и на один из входов первого и второго элементов И временного селектора 8 подаются-от- пирающие потенциалы. Одновременно через первый элемент ИЛИ блока 7 управления в блок 11 поступает сигнал Пуск (по второму входу), по которому разрешается
расчет параметров по программе (фиг.8).
Испытуемый, удерживая усилие в заданных амплитудных воротах с усилием FCp 0,5 Fmax через второй усилитель 2 первый 4 и второй 5 пороговые элементы обес- печивает на выходе -амплитудного селектора сигнал логической 1, которая открывает элемент И временного селектора 8, и тактовые частоты от генератора тактовых импульсов поступают на счетный вход счетчика временного селектора 8.
Одновременно от датчика 9 электромиограмм через первый усилитель 10 и вычислительный блок 11 поступает электрофизиологический сигнал, подвергающийся анализу.
Если испытуемый по какой-либо причине вышел за границы амплитудных ворот, то срабатывает первый или второй пороговые элементы, при этом лампочка Л1 амплитудного селектора 6 гаснет, информируя испытуемого о том, что необходимо вернуться в рамки амлпитудных ворот, а на выходе амплитудного селектора 6 появляется
логический ноль, который через элемент НЕ и третий элемент ИЛИ блока 7 управления выставляет на первом входе вычислительного блока 11 сигнал Сброс. Одновременно сигнал с элемента НЕ через элемент ИЛИ
поступает на вход установки в ноль счетчика временного селектора 8. Тем самым все устройство будет переведено в состояние начальной готовности, а накопленные результаты исследования будут анулиро- ваны.
После того, как испытуемый снова вернется в заданные границы амплитудных ворот, на выходе амплитудного селектора появится сигнал лог. 1 и загорится лампочка Л1, информируя последнего о том, что он снова вошел в заданные границы. Перепад из нуля в единицу на выходе амплитудного селектора 6 разрешает одновибратору блока 7 управления выработать сигнал, который, пройдя через первый элемент ИЛИ, поступает на второй вход вычислительного блока 11 и интерпритируется им как сигнал Пуск. Одновременно открывается элемент И временного селектора 8 и измерение электрофизиологического сигнала возоб- новляется.
Время измерения электрофизиологического сигнала определяется кодом, принятым от вычислительного блока 11 в регистр временного селектора 8. Таким образом, когда код счетчика временного селектора 8 сравняется с кодом регистра, то на выходе схемы сравнения появляется сигнал, который и останавливает работу устройства, т.е. через элемент ИЛИ устанавливает в нуле- вое состояние счетчик временного селектора 8, через второй элемент ИЛИ сбрасывает в ноль триггер блока 7 управления, тем самым закрывается элемент И временного селектора 8 и прекращается подача тактовых импульсов от генератора тактовых импульсов в счетчик временного селектора 8. Одновременно с этим гаснет лампочка в блоке управления, информируя испытуемого о том, что закончилось время исследова- ния, и подается сигнал на третий вход вычислительного блока 11, определяющий конец расчета параметров и выдачу результатов измерений.
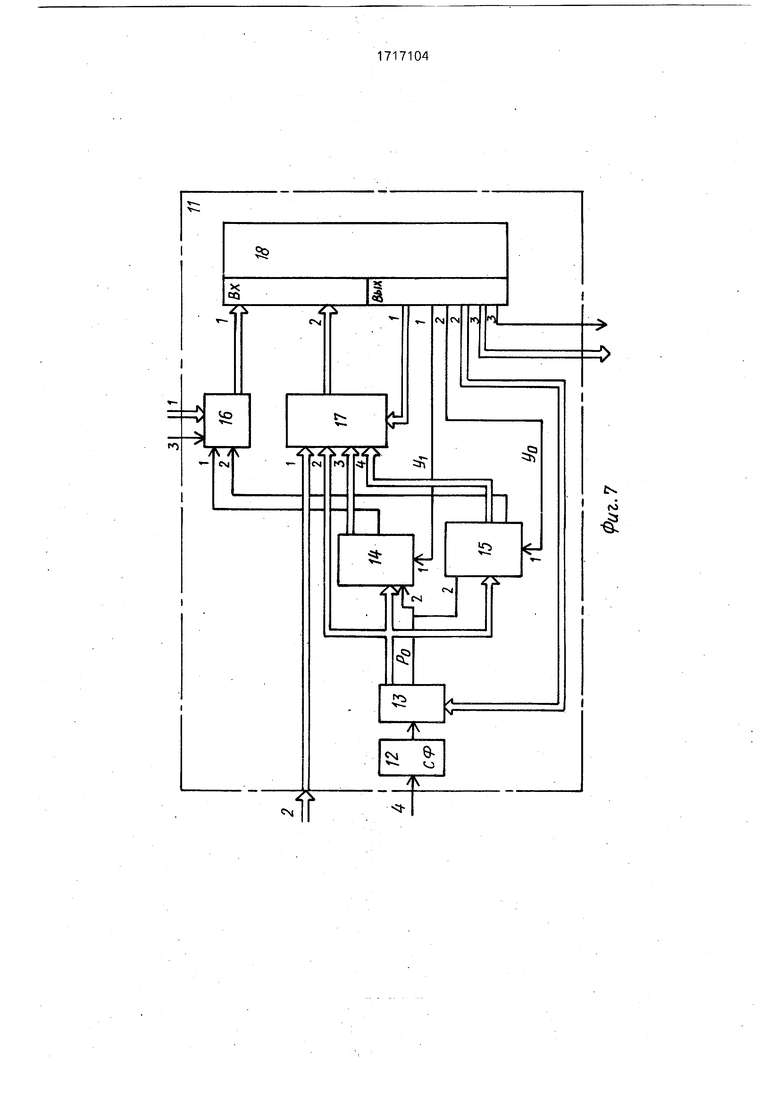
Структурная схема вычислительного блока 11 представлена на фиг. 7 и работает, как было сказано выше, по блок-схеме алгоритма (фиг.8), под управлением устройства 18 расчета параметров следующим образом, В качестве устройства 18 расчёта пара- метров в вычислительном блоке 11 может быть использовано серийно выпускаемое микропроцессорное устройство с портовой организацией ввода-вывода типа ДВК, ВК, Электроника-60, МС-1201 и др., либоспеци- ально разработанное микропроцессорное устройство на процессорных комплектах КР 580, К 1810, и др.
В макетном образце авторами была использована серийно выпускаемая персо- нальная микроЭВМ ВК-0010, имеющая в своем составе программно-управляемый шестнадцатиразрядный порт ввода-вывода. Разряды вводного и выходного портов разнесены следующим образом:
Входной порт
разряды с 0 по 12 отданы под коммутатор 17;
разряды с 13 по 15 отданы под шифратор 16. Выходной порт
разряды с 0 по 8 информационные для регистра временного селектора 8; разряд 9 разрешение приема в регистр временного селектора 8;
разряды 10 и 11 служат для управления АЦП13;
разряд 12 служит для начальной установки блока 15 выделения рангов переключения максимумов;
разряд 13 служит для начальной установки блока 14 выделения рангов переключения минимумов;
разряды 14 и 15 для управления коммутатором 17.
При включении в работу вычислительного блока 11 (запуск программы командой, например, S10P0) он начинает выполнять программу по блок-схеме алгоритма (фиг.8).
При выполнении блока 2 устанавливаются все ячейки памяти, участвующие в работе программы, в начальное состояние. Выставляется на выходном порте устройства расчета параметров 18 код времени, заданный экспериментатором как величина временных ворот, и сигнал разрешения приема этого кода в регистр временного селектора 8 (блок 3). Далее принимается с входного порта устройства расчета параметров 18 код от шифратора 16, кодирующего признаки переходов по программе расчета параметров миограмм и заносит его в ячейку памяти с именем И. Далее анализируется принятое значение (блоки 4,5,7 фиг.8), Если на первом и втором входах вычислительного блока 11 отсутствуют сигналы, интерпритируемые устройством расчета параметров 18 как сигналы Сброс и Пуск соответственно, то это устройство находится в режиме циклического выполнения блоков 4,5,7 (фиг.8) до появления одного из этих сигналов.
При нажатии кнопки Сброс в блоке 7 управления, на первом входе вычислительного блока 11 появляется сигнал Сброс, по которому устройство расчета параметров 18 активизирует в выходном порте разряды 12 и 13 и устанавливает блоки расчета рангов переключения по минимуму 14 и 15 в начальное состояние (выход ДА блока 5, блок 6, фиг. 8). После этого устройство расчета параметров переходит опять в режим циклического выполнения блоков 4,5,7,
По нажатии кнопки Пуск в блоке 7 управления на втором входе вычислительного блока 11 появляется сигнал Пуск, по
которому устройство расчета параметров 18 переходит к расчету параметров электроми- ограмм по вышеприведенным формулам 1-9.
Для этого устройство расчета парамет- ров 18 выставляет на входе АЦП 13 сигнал запуска (блок 8), затем устройство расчета параметров 18 переходит в режим ожидания,длительность которого определяется временем преобразования АЦП. По оконча- ниии программной задержки устройство расчета параметров 18 выставляет сигнал разрешения выдачи информации на выход АЦП 13. В ответ на этот сигнал АЦП 13 вырабатывает сигнал разрешающий прием информации в блоки выделения рангов переключения минимумов 14 и максимумов 15, которые анализируют принятое значение, если оно является минимумом или максимумом какого-либо ранга, то эти блоки выставляют код ранга переключения, к которому относится данный минимум или максимум ПИ1 или ПИ2 (признак информации), говорящий о том, что блоком выделения рангов переключения минимумов 14 или максимумов 15 найден минимум либо максимум исследуемого сигнала.
Однвоременно с этим устройство расчета параметров 18 настраивает коммутатор 17 на передачу величины от АЦП 13 и при- нимает последнюю в ячейку памяти с именем А. Затем настраивает коммутатор 17 на передачу информации о текущем времени от временного селектора 8 и принимает ее величину в ячейку памяти с именем Т1 (бло- ки 11-14, фиг. 8).
К этому моменту в блоках выделения рангов переключения минимумов 14 и максимумов 15 закончатся переходные процессы и устройство расчета параметров 18 анализирует ячейку памяти с именем И на наличие или отсутствие сигналов ПИ1 и ПИ2.
Если отсутствует сигнал ПИ1, то устройство расчета параметров 18 настраивает коммутатор 17 на передачу кода ранга переключения от блока выделения рангов переключения минимумов 14 и принимает этот код в ячейку памяти с именем К. Анализируя принятую величину К, устройство расчета параметров 18 выясняет для какого ранга переключения необходимо произвести подсчет частичных значений по вышеприведенным формулам и отрабатывает блок 2 К и все блоки 2 с более низким рангом переключе- ния до первого (блоки 22-28).
Если присутствует сигнал ПИ2, то устройство расчета параметров 18 настраивает коммутатор 17 на передачу кода ранга переключения от блока выделения рангов пере-
ключения 15 и принимает этот код в ячейку памяти с именем К. Анализируя принятую величину К устройство расчета параметров 18 поясняет для какого ранга переключения необходимо произвести подсчет частичных значений по формулам, приведенным выше (блоки 15-21).
Далее устройство расчета параметров 18 принимает код от шифратора 16 и анализирует принятое значение на наличие сигналов Сброс и КВВ (конец временных ворот). Сигнал Сброс может появиться в том случае, если испытуемый вывел усилие за пределы установленных границ, а в этом случае необходимо произвести начальную установку устройства расчета параметров (блок 31) и расчет параметров вести заново. По окончании заданного времени (временных ворот) временной селектор 8 вырабатывает сигнал КВВ, по которому устройство расчета параметров 18 рассчитывает параметры в окончательном виде и выводит результаты измерений на видеотерминал, входящий в состав устройства расчета параметров 18 (блоки 33-37). Если эти сигналы отсутствуют, то устройство расчета параметров 18 продолжает расчет частичных значений параметров по описанному выше алгоритму.
Количество блоков 1 и 2 (блоки 19-21, 26-28) определяется необходимым количеством рангов переключения (5-10) и строятся они по аналогичным схемам, например, представленным на фиг. 8.
При описании блок-схемы алгоритма использовались, следующие идентификаторы:
MIC...MnC - ячейка памяти для хранения средней площади под кривой i ЭМГдля 1...п рангов разложения сигнала;
М1Т...МпТ- ячейка памяти для хранения средней длительности волны по 1...п рангам переключения;
,..МпА-ячейка памяти для хранения средней амплитуды рангам переключения;
М1АС...МпАС - ячейка памяти для хранения средней асимметрии сигнала по 1...П рангам переключения;
Д1П...ДПП - дисперсия площадей ...ДпТ - дисперсии длительности волны ...ДпА - дисперсии амплитуды ...ДпАС дисперсии асимметрии.Nn - количество измерений - SMIC...SMnC - частичной суммы С; в формуле 1
SMIT...SMnT частичной суммы в формуле 3
SMIA...SMnA частичной суммы в формуле 4
SMIAC...SMnAC - частичной суммы в формуле 5
ЗД1П...5ДПП - частичной суммы в формуле 6
ЗД1Т...5ДпТ - частичной суммы в формуле 7
5Д1А...5ДпА - частичной суммы в формуле 8
ЗД1АС...5ДпАС - частичной суммы в формуле 9
A1MIN...AnMIN - текущего значения минимума амплитуды по l...n рангам переключений
T1MIN...TnMIN - текущего значения в точке минимума
SIA...SnA - суммарной площади под кривой исследуемого сигнала
TL.Tn - суммарного времени - PTMIN - разности времени результата расчета по формуле 2 - разности амплитуды максимума и минимума
РТ1...РТП - разности в формуле 5 и 9 блоки устройства могут быть реализованы на широко распространенных микросхемах серии К155, К561, К564, в качестве АЦП может быть использован серийно выпускаемый АЦП серии К572, К1107, К1108, К1113. Выбор конкретного АЦП будет влиять только на задание программной задержки при управлении работой АЦП со стороны устройства 18 расчета параметров 18.
Предлагаемое устройство позволяет на научной основе решать вопросы профориентации, профотбора, рациональной расстановки кадров, оценивать влияние условий труда на состояние человека и разрабатывать мероприятия по уменьшению отрицательных эффектов влияния условий
труда на состояние человека. Данное устройство может обеспечить более раннюю неврологическую диагностику и найти применение при массовой неврологической
диспансеризации населения.
Формула изобретения Устройство для определения параметров электромиограммы, содержащее последовательно соединенные датчик электромиограммы и первый усилитель, последовательно соединенные второй усилитель и первый пороговый элемент, делитель напряжения, первый выход которого подключен к второму входу первого порогового
элемента, и вычислительный блок, отличающееся тем, что, с целью повышения достоверности диагностики за счет определения дополнительных информативных параметров и унификации условий регистрации электромиограммы, в него введены датчик усилий, подключенный к входу второго усилителя, и последовательно соединенные второй пороговый элемент, амплитудный селектор, временной селектор
и блок управления, второй вход которого подключен к выходу амплитудного селектора, второй вход которого соединен с выходом первого порогового элемента, первый вход которого подключен к первому входу
второго порогового элемента, второй вход которого соединен с вторым выходом делителя напряжения, причем первые выходы блока управления подключены соответственно к первым входам вычислительного
блока, вторые входы которого соединены соответственно с вторыми выходами временного селектора, вторые входы которого подключены соответственно к вторым выходам блока управления, первый вход которого соединен с третьим входом вычислительного блока, четвертый вход которого подключен к выходу первого усилителя, а выходы подключены соответственно к третьим входам временного селектора.
idrevj
w,


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ | 1973 |
|
SU382983A1 |
| УСТРОЙСТВО ДЛЯ РАНГОВОЙ ОБРАБОТКИ ДИСКРЕТНО-АНАЛОГОВЫХ СИГНАЛОВ | 1992 |
|
RU2129302C1 |
| Самонастраивающийся амплитудный селектор | 1983 |
|
SU1152082A1 |
| Устройство синхронизации электроразведочных приемников | 1980 |
|
SU883832A1 |
| Способ управления устройствами посредством обработки сигналов ЭЭГ | 2019 |
|
RU2717213C1 |
| Устройство для программного управленияСТАНКОМ | 1979 |
|
SU830307A1 |
| Временной селектор видеоимпульсов для дальномера | 1982 |
|
SU1070495A1 |
| Устройство для адаптивного скользящего сглаживания | 1986 |
|
SU1387017A1 |
| Развертывающий преобразователь | 1986 |
|
SU1372336A1 |


Изобретение относится к медицинской технике. Устройство содержит датчик 1 усилий, усилитель 2, делитель 3 напряжения, пороговые элементы 4 и 5, амплитудный селектор 6, блок 7 управления, временной селектор 8, датчик 9 электромиограммы, усилитель 10, вычислительный блок 11. Оно повышает достоверность диагностики за счет определения дополнительных информативных параметров и унификации условий регистрации электромиограммы. 1-2-4-6-8-11,3-5-6, 3-4, 2-5. 9-10-11, 6-7-8-11, 7-11.8 ил.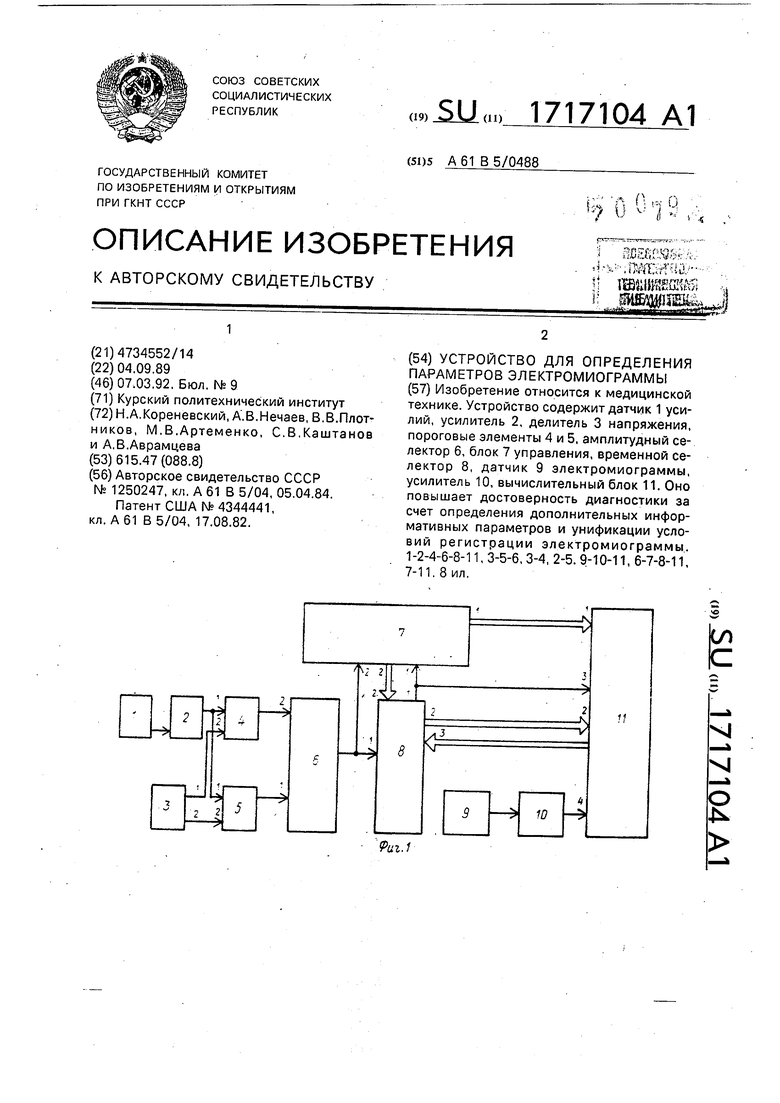
УМ,
Фаг. 2
) Формирование характеристик 1горанга Aj 11
A;+1ti
Риг.З
j(t) Формирование характеристик Кго ранш.
ft.Z
Aj+12
ФигА
Ъ + 12t
Т
t}2 t22
&
$
1 r,
MC.
/
Фиг.5
РТМ1Н-П1Т-Т1М1Н
SM7T sMiTi-pmiH
I
51 71 -StA- -$MN+mA)l2 PI Ml It
SM1C SH1C+CI SM1AC-SM1AC +Л1Т+РТ1
СГ-CIxCI СД1Т 5Л1Т1-С1
PTMIN-PTM1N
xPTMIN
S L1T S&1T+PTM1H
WAC S&1AC+ +(Л1Т+РГ1)г
NUM1+1
S2A S2A+S1A T2 T2+T1 n2A A1MIN .1М1Н
г
Фиг. 8a
Блок .л
f
РТМ№ЛПТ-Т„ММ SMnT SMnT+PTMIN
Cl Tn-SnA-(AnMIN+ +ППА)12-PTM1N
1
SMnC SMnC+Cl SMnAC SMi,AC+nnT+PT1
I
SHn SAnn+CI
PTmN PTMlN PTMIN SJLnT SunT+PTMM
5Д„АС ЗДЛАС+ +(ЛпТ+РТ„}г
I
.J
PT T1MIN-ri1T
f
Фиг. 8 5
6ЛОК1.П
РА ППА-А„И1М
5МПА-8МПА+ А
I
РА РАхРД
1
1
nnT L1/7/1r РТп Т„М1Н-П„Т
..J
/
| Система передачи и обработки электромиограмм | 1984 |
|
SU1250247A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Патент США №4344441, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
