с
00 О5
4
4
жении якорь 7 находится в нижнем положении, опираясь краем поверхности 9, на которой выполнена многозаход- ная винтовая резьба, на крышку 12 корпуса с подшипником 20 При необходимости поворота схвата 4 на требуемый угол на обмотку 6, расположенную в корпусе 1, подается постоянное-напряжение от источника питания 5. Якорь 7 при этом втягивается в обмотку 6,
одновременно поворачиваясь вокруг своей оси за счет электромагнитного взаимодействия резьбы якоря 7 с резьбой гайки 11, установленной в корпусе 1, При этом штифты 18, закрепленные на хвостовике 10 якоря, поворачивают втулку 13, на которой закреплен схват 4. Величина угла поворота схвата 4 зависит от величины напряжения на обмотке 1 з.п. ф-лы, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1985 |
|
SU1284828A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ КЛАПАН | 1992 |
|
RU2046238C1 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ | 2015 |
|
RU2610747C1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| ПУСКОВОЕ УСТРОЙСТВО | 1991 |
|
RU2048654C1 |
| Схват | 1986 |
|
SU1335450A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЗАМОК | 2005 |
|
RU2283411C1 |
| Вакуумный захват (его варианты) | 1984 |
|
SU1201214A1 |
Изобретение относится к области робототехники и может быть использовано в промьппленных роботах различного назначения. Целью изобретения является расширение технологических возможностей за счет осуществления ориентации схвата без контакта с захватываемым объектом. В исходном поло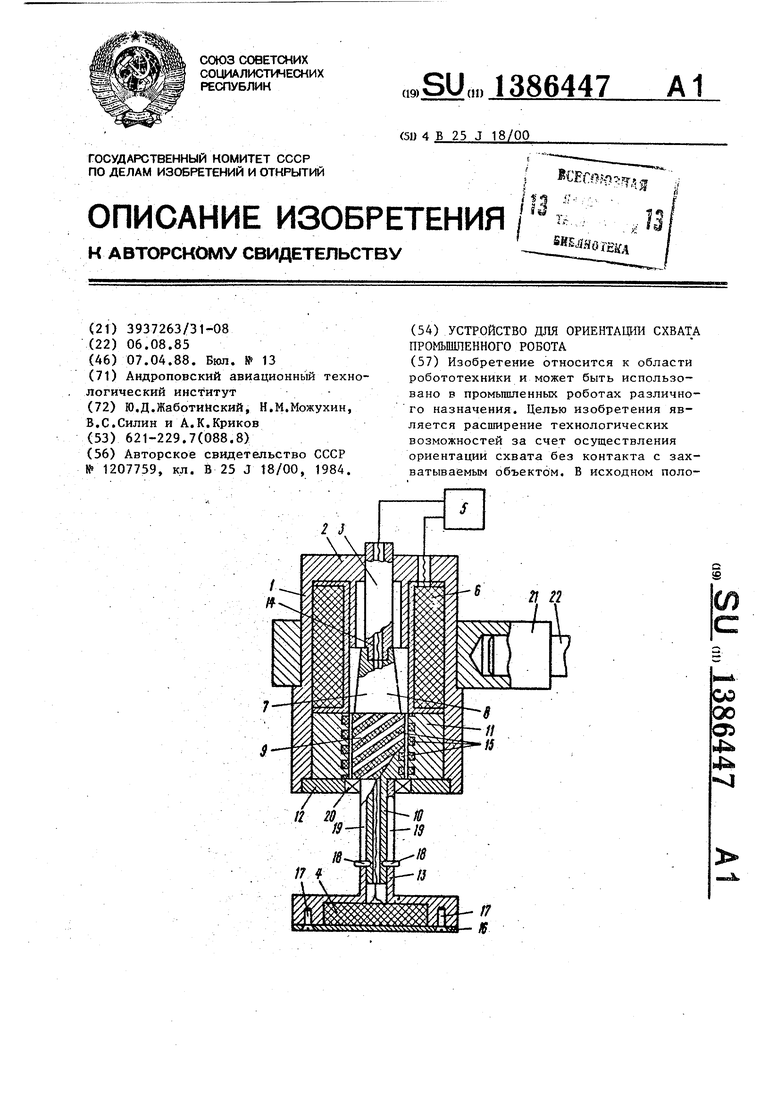
1
Изобретение относится к робототехнике и может быть использовано в про- мыишенных роботах различного назначения.
Целью изобретения является расширение технологических возможностей за счет осуществления ориентации схвата без контакта с захватываемым объектом.
.На чертеже изображено устройство, общий вид.
Устройство для ориентации схвата промышленного робота содержит цилиндрический корпус 1, на одном торце 2 которого имеется отверстие под стержень 3, выполненный из немагнитного материала и имеющий возможность продольного перемещения и поворота относительно отверстия в торце 2 корпуса 1. Устройство также содержит электромагнитный схват 4, источник 5 питания, установленные в корпусе 1 обмотку 6, якорь 7, один конец 8 которого выполнен коническим, при этом на цилиндрической боковой поверхности 9 выполнена многозаходная винтовая резьба, а другой конец выполнен в виде цилиндрического хвостовика 10.
Кроме того, устройство содержит гайку 11 с многозаходной резьбо й, шаг которой равен шагу резьбы якоря, выполненную из магнитопроводного материала и установленную в корпусе 1, крышку 12 корпуса и втулку 13. Конец 14 стержня 3 жестко связан с якорем 7, а пазы между витками резьбы якоря 7 и гайки 11 заполнены немагнитопро- водными материалами 15.
Схват 4 установлен на нижней части нтулки 13 и закрыт крышкой 16, коепя0
0
5
0
5
0
щейся к втулке винтами 17. В хвостовик 10 якоря 7 запрессованы два штифта 18, входящие в пазы 19 втулки 13. Конец втулки 13 с натягом вставлен в Подшипник 20, установленный в крьпике 12, запрессованной в нижнюю часть, корпуса Г. Первый выход источника 5 питания через отверстие в корпусе 1 подключен к катушке 6 индуктивности, а второй выход через отверстия в стержне 3 и якоре 7 - к обмотке электромагнитного схвата 4. Устройство для ориентации схвата с помощью хомута 21 крепится на руке 22 промышленного робота.
Устройство работает следующим образом.
В начальный момент якорь 7 нахо- i дится в крайнем нижнем положении, опираясь краем поверхности 9 на крьш1- ку 12 кор.пуса с подшипником 20. В рабочем режиме при необходимости поворота схвата 4 на требуемый угол с первого выхода источника 5 питания на обмотку 6 подается постоянное напряжение. Так как стержень 3 выполнен из немагнитного материала, то магнитный поток катушки 6 разомкнут, и начинается втягивание якоря 7 в обмотку 6. Величина втягивания (вертикального перемещения якоря 7) пропорциональна напряжению на первом выходе источника 5 питания. Втягивание якоря 7 сопровождается одновременным efo поворотом, это связано с тем, что винтовая резьба на поверхности 9 якоря 7 и гайка 11 образуют передачу ти-- па винт - гайка за счет электромагнитного взаимодействия между ними, при этом угол поворота пропорционален
напрявтягиванию, а следовательно, и жению на первом выходе источника 5 питания. При втягивании якоря 7 штифты 18 перемещаются .вверх по пазам 19 втулки 13. Одновременно с эти за счет поворота якоря 7 штифты 18 вступают в контакт с кромкой пазов 19 и разворачивают втулку 13 со схва том 4. В результате схват 4 разворачивается на угол , зависящий от величины напряжения на первом выходе источника 5 питания. При захвате детал с второго выхода источника 5 питания
подается напряжение на обмотку элект- якоря, вьшолненной из магнитопроводромагнитного схвата 4. При снятии напряжения на втором выходе источника 5 питания деталь опускается, и . при снятии напряжения на первом выходе якорь 7 приходит в исходное состояние.
Формула изобретения
25
30
ного материала и установленной внутри корпуса со стороны схвата, крьшкой корпуса, расположенной со стороны схвата, втулкой с продольными пазами, установленной в крьш1ке корпуса с возможностью поворота, и штифтами, расположенными в пазах втулки и закреп- ленными на цилиндрическом хвостовике якоря, при этом якорь расположен во втулке с возможностью продольного перемещения, схват закреплен на втулке, а впадины между витками резьбы якоря и гайки заполнены немагнито- проводным материалом.
такта его с захватываемым объектом, он снабжен аксиально установленной в корпусе обмоткой с расположенным внутри нее с возможностью продольного перемещения и поворота вокруг оси якорем, на цилиндрической боковой поверхности которого выполнена много- заходная резьба, один его конец выполнен коническим и жестко связан со стержнем, а другой выполнен в виде цилиндрического хвостовика, а также гайкой с многозаходной резьбой, щаг которой равен шагу винтовой нарезки
0
5
0
ного материала и установленной внутри корпуса со стороны схвата, крьшкой корпуса, расположенной со стороны схвата, втулкой с продольными пазами, установленной в крьш1ке корпуса с возможностью поворота, и штифтами, расположенными в пазах втулки и закреп- ленными на цилиндрическом хвостовике якоря, при этом якорь расположен во втулке с возможностью продольного перемещения, схват закреплен на втулке, а впадины между витками резьбы якоря и гайки заполнены немагнито- проводным материалом.
| Устройство для ориентации захвата промышленного робота | 1984 |
|
SU1207759A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
