мер заготовки 22. Схват подводится к заготовке 22 до контакта роликов 1.8. В то же время коромысло 16 воздействует на ролики 13, установленные на противоположных плечах двуплечих захватных рычагов 12. При дальнейшем перемещении корпуса 3 в сторону за- го.товки 22 ролики 18 обкатываются по
1
Изобретение относится к машиностроению, а именно к захватным устройствам промьшшенпых роботов, може быть использовано в различных технологических процессах, где требуется точное позиционирование заготовки.
Цель изобретения - расширение технологических возможностей за сче обеспечения возможности захвата заготовок различной конфигурации.
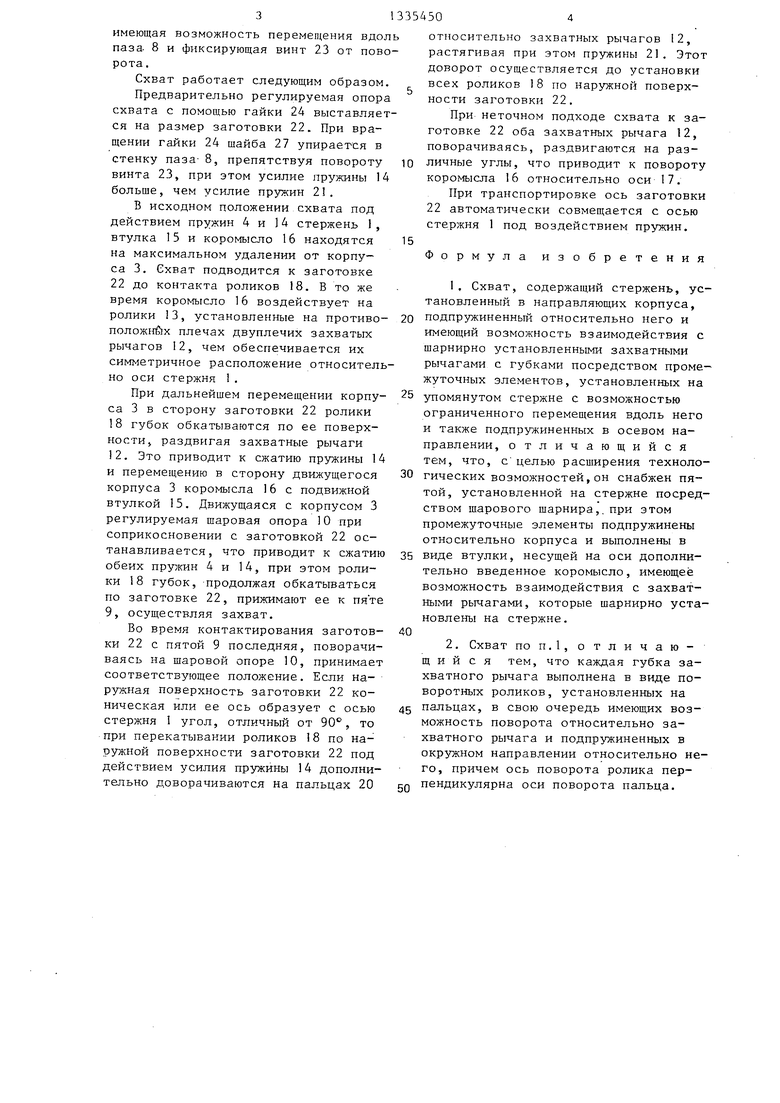
На фиг.1 изображен схват, общий вид, с зажатой в нем заготовкой; на фиг. 2 - то же, при з;зжиме заготовки ось которой смещена относительно оси схвата; на фиг.З - вид А на фиг.1, на фиг.А - разрез Б-Б на фиг.1; на фиг.5 - разрез В-В на фиг.1; на фиг.6 - разрез Г-Г на фиг.1; на фиг.7 - разрез Д-Д на фиг.1.
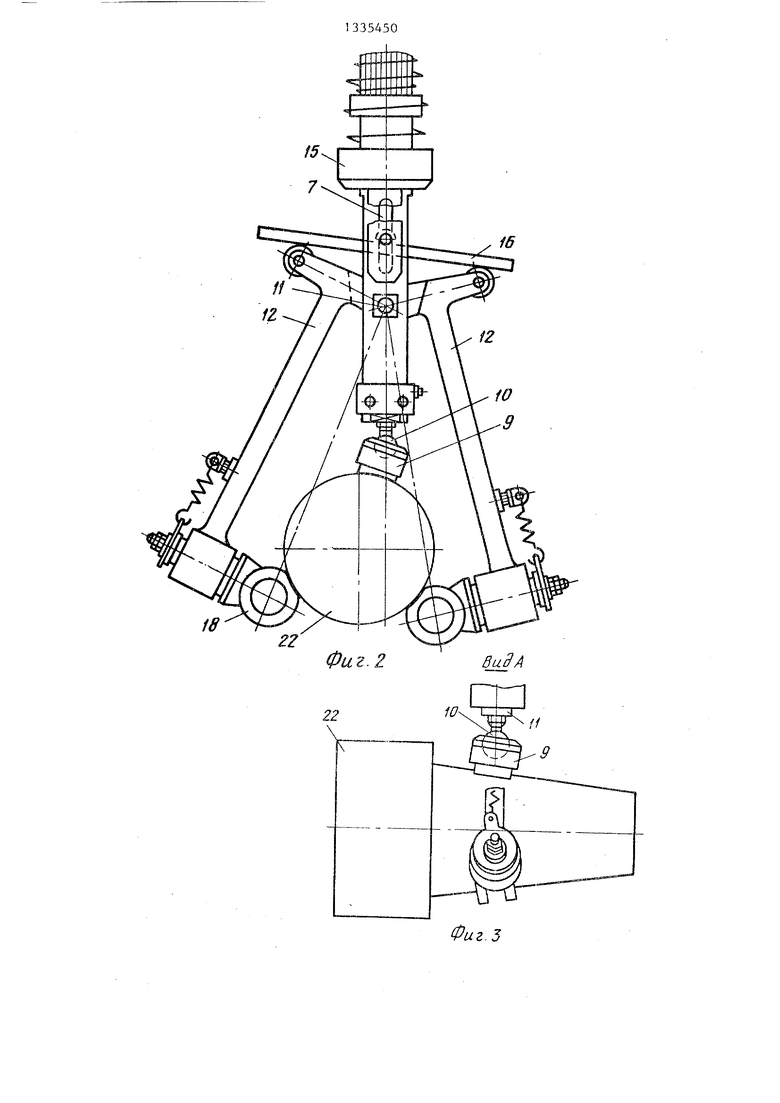
Схват содержит стержень 1, имеющи возможность перемегления по направляющим 2 корпуса 3 и подпружиненньй относительно корпуса пружиной А, установленной коаксиально стержню 1 между чашечками 5. Стержень 1 имеет ответные направляющие и регулировочную резьбу на одном конце, круглый поясок 6 и два взаимно перпендикулярных паза 7 и 8 - в середине, торцовое и соосные боковые отверстия - на про- -тивоположном конце, причем торцовое отверстие соединено с пазом 8.
В торцовом отверстии установлена
пята 9 на шаровой опоре 10 с возможностью регулировочного перемещения. В соосных боковых отверстиях шарнир- но установлены посредством оси 11 двуплечие захватные рычаги 12, одни плечи которых несут губки, а другие ролики 13, взаимодействующие с про
ее поверхности, раздвигая захватные рычаги 12. Шаровая опора 10 с пятой 9 останавливается при соприкосновении с заготовкой 22, при этом ролики 18, продолжая обкатываться по заготовке 22, прижимают ее к пяте 9, осуществляя захват. 1 з п. ф-лы, 7 ил.
5
С
5
0
0
межуточпыми элементами, которые подпружинены относительно корпуса 3 пружиной 14, установленной коаксиально пружине 4 и стержню 1. Промежуточные элементы состоят из втулки 15 и коромысла 16. Втулка 15 устагювлена на круглом пояске 6 стержня 1 с возможностью перемещения вдоль него и выполнена с буртиком, в который упирается пружина 14, и двумя проушинами, в которых выполнены сооспые отверстия и установлена ось 17 коромысла 16, причем ось 17 имеет возможность перемещения по пазу 7, а коро-. мысло 16 - по пазу 8.
Губки захватных рычагов 12 выполнены в виде роликов 18, установленных с возможностью noBopo ia относительно кронштейнов 19, выполненных на пальцах 20, имеющих возможность поворота относительно захватных рычагов 12 и подпружиненных в окружном направлении относительно них пружиной 21, причем оси поворота роликов 18 перпендикулярны осям поворота пальцев 20. Для лучшего контакта с заготовкой ролики 1В выполнены спаренными и покрыты так же, как и пята 9, материалом, имеющим высокий коэффициент трения, например резиной.
Регулировочное перемещение шаровой опоры 10 с пятой 9 осуществляется посредством винта 23 и гайки 24. Гайка 24 фиксируется в стержне 1 от продольного переме1иения штифтами 25, однако кольцевая проточка, выполненная на поверхности гайки, позволяет осуществлять ее поворот. Фиксация от поворота гайки 24 осуществляется стопорным винтом 26. В торце винта 23 установле} а 1иайба 27 с лысками.
имеющая возможность перемещения вдол паза 8 и фиксирующая винт 23 от поворота .
Схват работает следующим образом.
Предварительно регулируемая опора охвата с помощью гайки 24 выставляется на размер заготовки 22. При вращении гайки 24 шайба 27 упирает ся в стенку паза- 8, препятствуя повороту винта 23, при этом усилие пружины 14 больше, чем усилие пружин 21.
В исходном положении схвата под действием пружин 4 и 14 стержень 1, втулка 15 и коромысло 16 находятся на максимальном удалении от корпуса 3. Схват подводится к заготовке 22 до контакта роликов 18. В то же время коромысло 16 воздействует на ролики 13, установленные на противо- полож1гб1х плечах двуплечих захватых рычагов 12, чем обеспечивается их симметричное расположение относительно оси стержня 1.
При дальнейшем перемещении корпуса 3 в сторону заготовки 22 ролики 18 губок обкатываются по ее поверхности, раздвигая захватные рычаги 12. Это приводит к сжатию пружины 14 и перемещению в сторону движущегося корпуса 3 коромысла 16 с подвижной втулкой 15. Движущаяся с корпусом 3 регулируемая шаровая опора 10 при соприкосновении с заготовкой 22 останавливается, что приводит к сжатию обеих 4 и 14, при этом ролики 18 губок, продолжая обкатываться по заготовке 22, прижимают ее к пяте 9, осуществляя захват.
Во время контактирования заготов- ки 22 с пятой 9 последняя, поворачиваясь на шаровой опоре 10, принимает соответствующее положение. Если наружная поверхность заготовки 22 коническая или ее ось образует с осью стержня 1 угол, отличный от 90, то при перекатывании роликов 18 по наружной поверхности заготовки 22 под действием усилия пружины 14 дополнительно доворачиваются на пальцах 20
10
15354504
относительно захватных рычагов 12, растягивая при этом пружины 21. Этот доворот осуществляется до установки всех роликов 18 по наружной поверхности заготовки 22.
При неточном подходе схвата к заготовке 22 оба захватных рычага 12, поворачиваясь, раздвигаются на различные углы, что приводит к повороту коромысла 16 относительно оси 17.
При транспортировке ось заготовки 22 автоматически совмещается с осью стержня 1 под воздействием пружин.
Формула изобретения
1,Схват, содержащий стержень, установленный в направляющих корпуса, подпружиненный относительно него и имеющий возможность взаимодействия с шарнирно установленными захватными рычагами с губками посредством промежуточных элементов, установленных на упомянутом стержне с возможностью ограниченного перемещения вдоль него и также подпружиненных в осевом направлении, отличающийся тем, что, с целью расширения технологических возможностей,он снабжен пятой, установленной на стержне посредством шарового шарнира,.при этом промежуточные элементы подпружинены относительно корпуса и выполнены в
виде втулки, несущей на оси дополнительно введенное коромысло, имеющее возможность взаимодействия с захватными рычагами, которые шарнирно установлены на стержне.
2.Схват ПОП.1, отличающийся тем, что каждая губка захватного рычага выполнена в виде поворотных роликов, установленных на пальцах, в свою очередь имеющих возможность поворота относительно захватного рычага и подпружиненных в окружном направлении относительно него, причем ось поворота ролика перпендикулярна оси поворота пальца.
16
1335450
б-Б
фигЛ
фиг. 5
Г-Г
Л-Л
1818
.7
фиг. 6
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство манипулятора | 1988 |
|
SU1572807A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Схват | 1983 |
|
SU1119842A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Захватное устройство | 1985 |
|
SU1255430A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
Изобретение относится к машиностроению, а именно к захватным устройствам промышленных роботов. Цель изобретения - расширение технологических возможностей за счет обеспечения возможности захвата заготовок различной конфигурации. Предварительно регулируемая опора 10 схвата при помощи гайки 24 выставляется на разч J (Л со GO сл 4 СЛ
Редактор В.Петраш
Составитель Т.Пинчук Техред Л.Олийнык
Заказ 4010/16 Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, -Ж-ЗЗ, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород, ул.Проектная, 4
Корректор Н.Король
| Заявка ФРГ № 3201353, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Схват | 1980 |
|
SU960009A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
