(54) ИСПОЛНИТЕЛЬНЫЙ ОРГАН СБОРОЧНОГО МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки деталей | 1977 |
|
SU663525A1 |
| Устройство для сборки деталей | 1980 |
|
SU1057228A1 |
| Сборочный агрегат | 1979 |
|
SU872177A1 |
| Исполнительный орган промышленного робота | 1979 |
|
SU781054A1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| Транспортер | 1975 |
|
SU601205A1 |
| Головка манипулятора | 1983 |
|
SU1085807A1 |
| Исполнительный орган манипулятора | 1979 |
|
SU861060A1 |
| Автомат для сборки деталей | 1979 |
|
SU831490A1 |
| Схват | 1977 |
|
SU659377A1 |

1
Изобретение относится к машиностроению и приборостроению и предназначено для автоматизации технологических процессов сборки и других операций на основе применения промышленных роботов и манипуляторов.
Известны исполнительные органы манипуляторов, содержашие руку, несуш,ую захват с пальцами, оснащенными наклонными упругими элементами, и привод зажимаразжима пальцев 1.
Недостатком известных исполнительных органов является ограниченная подвижность кисти с зажимными губками. Так, для совершения, например, операций укладки или сборки необходимо осуществлять движение всей руки, что снижает точность операций, повышает время цикла выполнения подобных операций. Кроме того, отсутствует возможность изменения положения деталей в схвате без изменения состояний губок схвата. Так, чтобы деталь была за-жата губками схвата только на половине ее длины, губки необходимо разводить и вновь осуществлять операцию захвата детали.
Цель изобретения - расширение технологических возможностей (универсальности) исполнительного органа для более эффективного манипулирования деталями при осу цествлении их укладки, сборки и т. п. 5Указанная цель достигается за счет того, что исполнительный орган снабжен установленным на механической руке, виброприводом, связанным с пальцами.
Вибропривод может быть выполнен элек10 тромагнитным, причем пальцы связаны с его якорем, а внутри катушки установлен привод зажима-разжима пальцев.
Кроме того, иглы могут быть установлены с наклоном одновременно в вертикальной и горизонтальной плоскостях. 5 Пальцы могут быть выполнены круглого поперечного сечения и снабжены приводом вращения вокруг своей оси.
Исполнительный орган может быть снабжен сферическим шарниром, установлсн20 ным между якорем вибропривода и схватом.
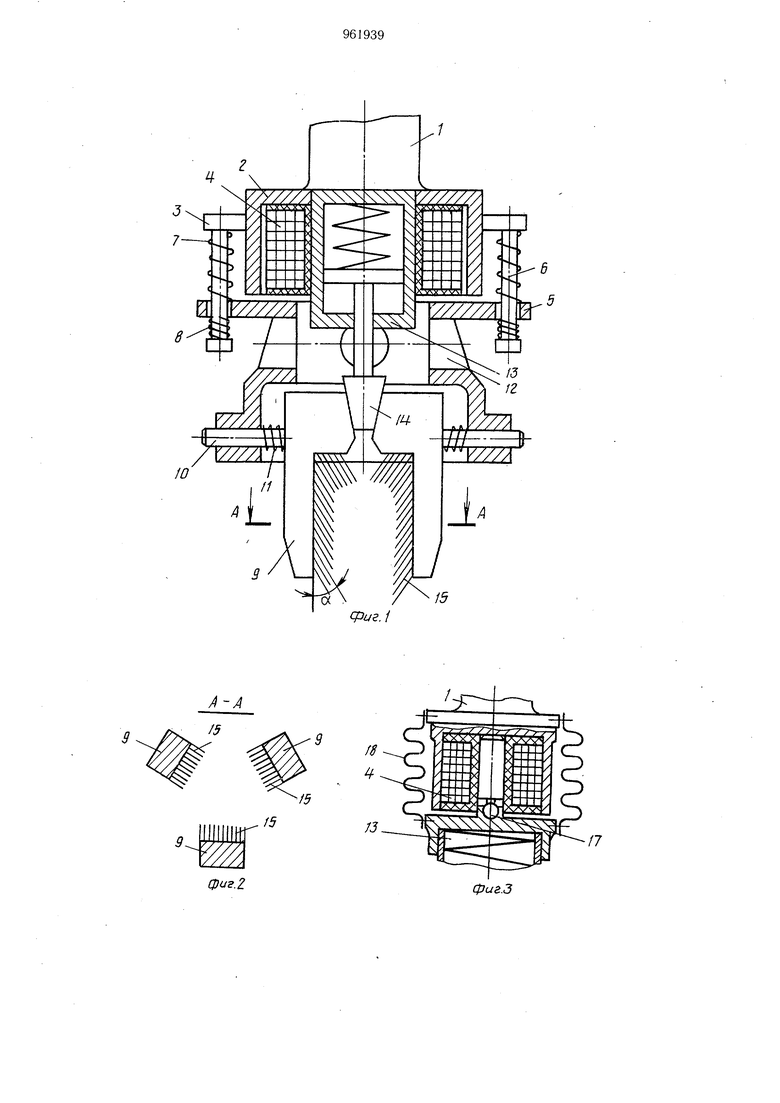
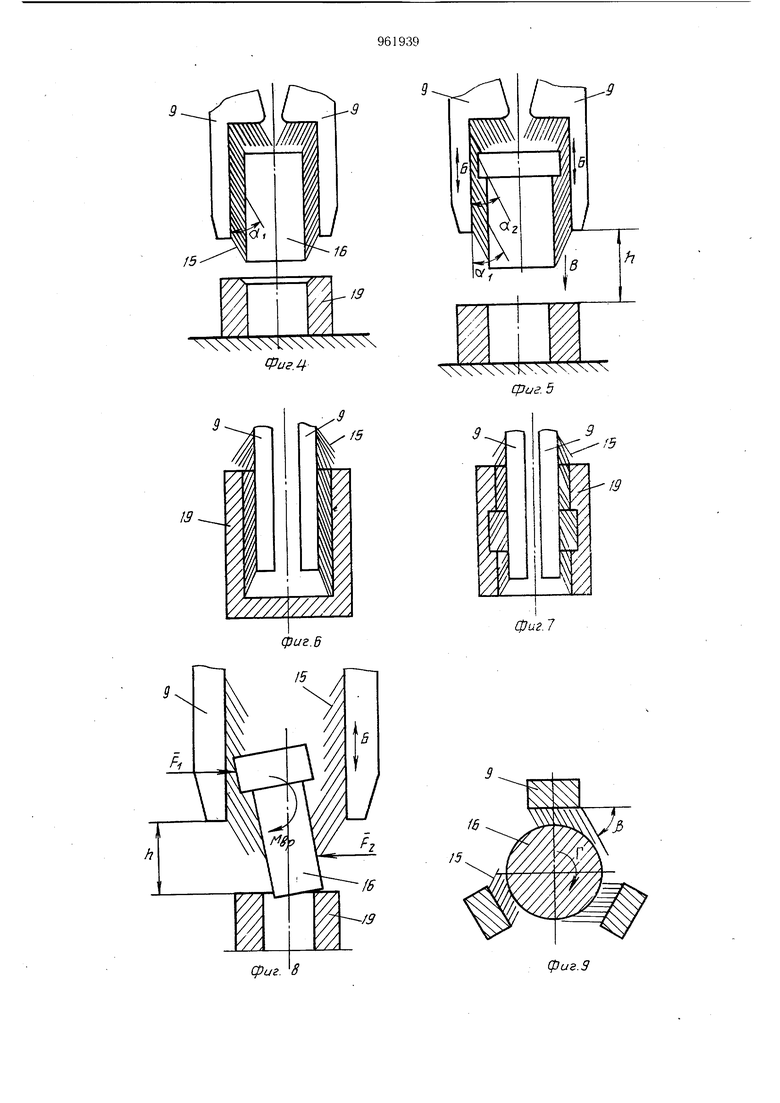
На фиг. 1 изображен схват сборочного манипулятора, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - вариант взаимосвязи руки манипулятора с исполнительным органом; на фиг. 4 - пальцыгубки исиолнительного органа, удерживаю,|цие .цилиндрическую деталь (вал) над втулкой; на фиг. 5 - схема захвата ступенчатой детали; на фиг. 6 - то же, нолой детали; на фиг. 7 - то же, полой ступенчатой детали; на фиг. 8 - возможное относительное положение деталей при их сопряжении; на фиг. 9 - вариант расположения упругих элементов (игл) на пальцах; на фиг. 10 - вариант конструкции пальцев исполнительного органа; на фиг. 11 - сечение Д-Д на фиг. 10 ; на фиг. 12 - вариант конструкции исполнительного органа.
Исполнительный орган (фиг. 1) сборочного манипулятора установлен на его руке 1 и содержит вибратор, включающий ярмо 2, кронштейн 3, обмотку 4, якорь 5. Последний взаимосвязан с кронштейном 3 посредством стержней 6 и пружин 7 и 8, снабжен отверстиями для пальцев 9 с хвостовиками 10, подпружиненными пружинами 11,а также снабжен отверстиями 12 для облегчения самого якоря 5. Внутри каркаса об.мотки 4 вибратора установлен пневмопривод 13 пе|эемеш,ения пальцев 9, шток которого снабжен сменным конусом 14.
Пальцы 9, в свою очередь, снабжены упругими наклонными элементами (иглами) 15, например, из проволоки, установленными с наклоном к поверхности каждого из пальцев 9 для удержаниядетали 16 (фиг. 4- 12). При этом наклон игл 15 может быть обеспечен как в вертикальной плоскости под углом оС (фиг. 4-8, 10-11), так и в горизонтальной плоскости под углом (фиг. 9).
Рука может быть связана со схватом посредством сферического шарнира 17 (фиг. 3), подвижно связывающего якорь вибратора со схватом, и сильфона 18,также связывающего руку 1 манипулятора со схватом. Пальцы 9 могут быть выполнены круг лыми в поперечном сечении и с возможностью поворота вокруг собственных осей (фиг. 10 и 11). Схват может осуществить зажим деталей 16 и 19.
Схват по.фиг. 12 содержит стержень 20, выполненный с возможностью закрепления на якоре вибратора. На стержне 20 установлена жестко крышка 21 и подвижно корпус 22. Стержень 20 заканчивается приливом 23,расположенным как поршень в корпусе 22. В пазах прилива 23 на осях 24 установлены пальцы 9, отжимаемые пружинами 25. Внутри корпуса 22 на стержне 20 установлена пружина 26. Подвижный корпус 22 взаимосвязан с неподвижной крышкой 21 посредством сильфона 27.
Исполнительный орган работает следующим образом.
В исходном положении схвата (фиг. 1) пальцы 9 под действием конуса 14 привода
13 разведены, а упругие элементы - иглы 15 пальцев 9 находятся в свободном состоянии, т. е. наклонены под углом оС к поверхности пальцев 9 (фиг. 1, 2,12).
При подаче воздуха в подпорщневую полость привода 13 перемещения пальцев 9 его щток с конусом 14 поджимается. Под действием пружин 11 пальцы 9 сводятся, т. е. осуществляется захват (зажим) детали 16 (фиг. 5, 5, 8-11). Под действием усилия
0 сжатия (под действием пружин 11) иглы 15 пальцев 9 несколько изгибаются и устанавливаются под углом оС (фиг. 4 и 5), при этом деталь 16 надежно удерживается в пальцах 9. Угол наклона и игл 15 изменяется в зависимости of степени сжатия детали 16 пальцами 9. При захвате ступенчатых деталей (фиг. 5) угол наклона игл 15 в одних местах (и в разных плоскостях) равен oti, в других о(..2, т. е. иглы самоустанавливаются, облегая сложный профиль детали
16 и, таким образом, надежно удерживают ее. Практически схват может осуществлять зажим различных по форме деталей 16 и 19 (фиг. 4-7) при установке соответствующих пальцев 9 с внутренним (фиг. 1,2, 4, 5,
- 8-12) или внешним (фиг. 6, 7) расположением игл 15 на пальцах 9.
Для осуществления сборки пары деталей, например 16 и 19 (фиг. 4 и 5) исполнительный орган устанавливают над деталью 19 и
0 подают питание на обмотку 4 вибратора. При работе последнего якорь 5 колеблется а вместе с ним совершают продольное колебание по стрелке Б пальцы 9 с иглами 15. Воздействие игл 15 на деталь 16 при ходе пальцев 9 вверх и вниз разное из-за наклона игл 15 под углом оС. При ходе пальцев 9 вверх иглы 15 проскальзывают вдоль поверхности детали 16, последняя при этом фактически остается на месте и даже несколько смещается вниз под действием силы тяжести. При ходе пальцев 9 вниз иглы 15 упираются в деталь 16 и толкают ее вниз, перемещая и приближая к втулке по стрелке В, Особенно сильным является воздействие игл, расположенных сверху над торцом детали 16 (эти иглы выделены жирными линиями на фиг.5). Поэтому деталь 16 быстро приближается к детали 19 и входит в отверстие, если оси деталей 16 и 19 совпадают. При этом слева на деталь 16 воздействует сила FI, так как
0 иглы 15 в этом месте изогнуты больше. Справа и ниже действует сила Гг по той же причине. Поэтому возникает момент Мвр , который разворачивает деталь 16 на центр отверстия детали 19, и деталь 16 попадает в это отверстие,- т. е. таким образом осуществляется сборка. По окончании сборки вибратор выключают, пневопривод разводит пальцы 9, и схват вновь может повторять цикл работы.
Отметим, что расстояние h (фиг.5) в процессе подачи детали 16 и сборки «е с деталью 19 не изменяется, так,как перемещение детали 16 осуществляется без движения вниз всего схвата. Это существенно упрощает сборочную систему и делает ее более эффективной. Кроме того, если даже сборка не осуществилась, поломки механизма не произойдет, так как иглы 15 являются упругими элементами.
Под действием упругих элементов - игл 15 не датель 16 при работе устройства при установке иглы 15 с наклоном их в горизонтальной плоскости под углом j3 обеспечивается еще и вращение детали 16 вокруг своей оси по стрелке Г. Дополнительное вращение детали 16 ускоряет и облегчает сопряжение деталей 16 и 19 (фиг. 4,5 и 8). В таком варианте устройство может быть использовано для наживления винтов, завинчиваемых в резьбовые отверстия, что расщиряет сферу его применения.
При работе исполнительного органа по фиг. 3 обеспечивается следующее: когда при несоосном положении собираемых деталей, под действием сборочного усилия возникает перекос деталей (фиг. 8), то возможен перекос относительно руки 1 и всего схвата благодаря наличию сферического шарнира 17 и гибкой связи с рукой 1 посредством сильфона 18.
После самоустановки детали 16 в пальцах 9 под действием сил FI и FZ и при осуществлении сборки, перекос схвата может оставаться. Однако по окончании сборки и возвращении руки 1 со схватом в исходное положение последний (под действием упругих сил, возникающих в сильфоне в момент перекоса исполнительного органа) займет свое первоначальное положение. Таким образом, благодаря наличию упругих гибких игл 15 происходит компенсация неточного расположения деталей и неточного выведения схвата на рабочую позицию благодаря наличию сильфона 18 и сферического щарнира 17.
Работа схвата при варианте конструкции пальцев 9, показанном на фиг. 10, 11,.осуществляется аналогично описанной выще, но благодаря возможности поворота пальцев 9 с иглами 15 можно путем только поворота по стрелке Е пальцев9 обеспечивать захват и фиксацию детали 16 или ее освобождение .
Для осуществления работы исполнительного органа по варианту, показанному на фиг. 12, во внутреннюю полость сильфона 27 подают сжатый воздух. Подвижный корпус 22 при этом из исходного положения перемещается вниз и сдвигает пальцы 9, поворачивая их вокруг осей 24,что обеспечивает захват и фиксацию детали 16. При включении вибратора (не показан.) пальцы 9 с
деталью 16 начинают колебаться и деталь 16 подается в соответствующее отверстие сопрягаемой детали (как показано на фиг. 5).
После окончания сборки воздух из полости сильфона выпускается и пружина 26 отводит корпус 22 вверх, а пружины 25 разводят пальцы 9. Исполнительный орган удаляется из зоны сборки, и может начинаться новый цикл с новой парой деталей.
Предлагаемый исполнительный орган без какой-бы то ни было переналадки можно использовать для сборки разных по диаметру и форме деталей, что свидетельствует о перспективности и значимости устройства, а также о его целесообразности. Простота устройства дополнительно определяет указанные вьшю преимущества. Такая конструк-ция схвата позволяет подавать детали не только сверху вннз, но и, наоборот, снизу вверх, а также сбоку, что очень существенно
при вставке, например, стержневых деталей в корпусные. Таким образом, в предлагаемой конструкции схвата существенно расширяются его функциональные возможности, обеспечивается нежесткий захват (зажим) детали и подвижность ее в пальцах.
Формула изобретения
он снабжен установленным на-механически руке виброприводом, связанным с пальцами.
плоскостях.
Источники информации, принятые во внимание при экспертизе
/5
фиг.г
фиг.З
ФигМ
W
фиг.
фиг. 7
фиг. 9
