Изобретение относится к электротехнике и может быть использовано для автоматизации включения на параллельную рабйту синхронных генераторов (СГ), в частности е судовой электроэнергетике.
Цель изобретения- увеличение скорости и упрощение синхронизации.
Поставленную цель достигают тем, что установление синхронно-синфазного режима подключаемого генераторного агрегата (ГА) относительно энергосистемы осуществляют за один период скольжения синхронизируемых напряжений путем изменения с постоянной скоростью частоты вращения ГА, начиная от момента достижения фазового сдвига синхронизируемых напряжений величины:
V ii
Он рад
где #si - начальное значение частоты скольжения;
Qh скорость изменения скольжения, до момента достижения указанного режима, при этом подгонку частоты ГА (скольжения) производят с максимально возможной скоростью, величина которой ограничена Средней скоростью изменения апериодической составляющей переходной характеристики агрегата за период времени, равный его инерционной постоянной:
00 СО
ы о
sup од1
(1 )
, рад/с2,
где сой и Таг- номинальная частота вращения и постоянная времени синхронизируемого ГА. а верхнюю границу допустимых значений начального скольжения определеляют из расчета возможности установки требуемого режима с постоянной скоростью од1 sup Шз, т.е. в соответствии с выражением
-/ j
)Юй
Та
рад/с.
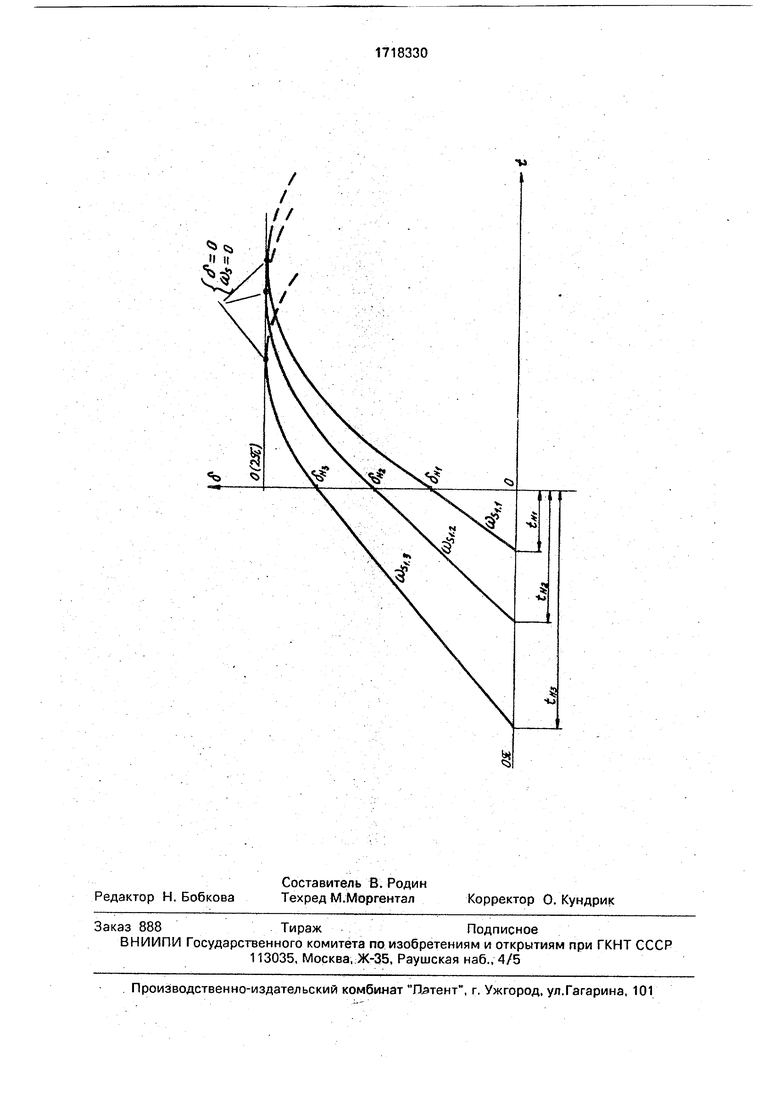
На чертеже приведены графики изменения разности фаз синхронизируемых напряжений в функции времени при разных параметрах начального скольжения «Osi.i ftfer.2 У51.зи соответствующих им значениях начальной разности фаз 5щ , 5н2 и днз в момент достижения которых вводится регулирующее воздействие, направленное на уменьшение скольжения, которое при совпадении фаз д 0 (2л:) становится равным нулю ( со$ 0).
Изобретение может быть реализовано на базе микропроцессорного контроллера, в ПЗУ которого заносится нормализованная информация (константы) о границах допустимых значений начального скольжения и о скорости применения скольжения при регулировании частоты вращения конкретных ГА. При наличии разрешающего сигнала на синхронизацию определяется угловая частота скольжения подключаемого ГА относительно энергосистемы и рассчитывается момент введения регулирующего воздейст-, вия. Исходя из зависимости начальной разности фаз. соответствующей моменту введения регулирующего воздействия, от величины начального скольжения и скорости его изменения:
« ii
..Он Рад
этот момент наступает через временной интервал
2л. %1
tH
«31
2о4
после момента совпадения фаз.
Таймер микроконтроллера, кодируемый на время задержки, равное tH, запускается на отсчет в момент регистрации совпадения фаз. По окончании задержки формируется сигнал изменения частоты вращения ГА, который прерывается в момент достижения условий, соответствующих реальным параметрам синхронно-синфазного режима, и одновременно формируется ко. 0
5
0
5
0
5
0
5
манда на включение ГА. Реальные параметры синхронно-синфазного режима могут соответствовать, например, следующим допустимым диапазонам: 5 0-10 эл.град и u)s О- ТО град/с.
Изобретение может быть использовано при разработке эффективных систем синхронизации ОГ, например в судовых электростанциях.
Формула изобретения Способ точной синхронизации синхронных генераторов, заключающийся в установлении синхронно-синфазного режима подключаемого генераторного агрегата относительно энергосистемы путем детерминированной подгонки его частоты и фазы, и включении на шины энергосистемы в момент достижения указанного режима, отличающийся тем, что, с целью увеличения скорости и упрощения синхронизации, установление синхронно-синфазного режима подключаемого генераторного агрегата относительно энергосистемы осуществляют за один период скольжения синхронизируемых напряжений путем изменения с постоянной скоростью частоты вращения агрегата, начиная от момента достижения фазового сдвига синхронизируемых напряжений величины:
-п«it
ан 27Г ТШГраА
где - начальное значение частоты скольжения,
0)1 - скорость изменения скольжения, до момента достижения указанного режима, при этом подгонку частоты генераторного агрегата производят с максимаьлно возможной для равномерного изменения скоростью, величина которой ограничена средней скоростью изменения апериодической составляющей переходной характеристики агрегата за период времени, равной его инерционной постоянной:
I Г1
SUP UJs .
, рад/с2
где WH и Та - соответственно номинальная частота вращения и инерционная постоянная времени синхронизируемого генераторного агрегата,
а верхнюю границу допустимых значений начального скольжения определяют из расчета возможности достижения требуемого режима при изменении скольжения с посто,1
л
яннои скоростью Ws sup .од.,
SUpUJsj
-2 }-2
(1 -е . )ий
рад/с.
И/
VX -I
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОЙ СИНХРОННОЙ МАШИНЫ С СЕТЬЮ | 2008 |
|
RU2359384C1 |
| Способ синхронизации возбуждённой синхронной машины с сетью | 2021 |
|
RU2770910C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОЙ СИНХРОННОЙ МАШИНЫ С СЕТЬЮ | 2011 |
|
RU2457597C1 |
| Устройство для автоматической синхронизации | 1983 |
|
SU1094106A1 |
| Устройство для автоматической синхронизации | 1981 |
|
SU1026236A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОЙ СИНХРОННОЙ МАШИНЫ С СЕТЬЮ (ВАРИАНТЫ) | 2000 |
|
RU2190917C2 |
| СПОСОБ УДАЛЕННОЙ СИНХРОНИЗАЦИИ И ВОССТАНОВЛЕНИЯ НОРМАЛЬНОГО РЕЖИМА АВАРИЙНО РАЗДЕЛЕННОЙ ЭЛЕКТРИЧЕСКОЙ СЕТИ С ГЕНЕРАТОРАМИ | 2020 |
|
RU2752693C1 |
| Устройство для автоматической синхронизации | 1982 |
|
SU1098067A1 |
| Устройство опережения синхронизатора | 1982 |
|
SU1072177A1 |
| Автоматический синхронизатор с постоянным углом опережения | 1982 |
|
SU1065957A2 |
Изобретение относится к электротехнике и может быть использовано дляi автоматизации включения на параллельную работу Синхронных генераторов (СГ), в частности в судовой электроэнергетике. Цель -повышение скорости и. упрощение синхронизации. Поставленная цель достигается подгонкой частоты генераторного агрегата за один период скольжения синхронизируемых напряжений, начиная от определенно, (щ го (OH 2 ) момента и до момента 2. Ct)s достижения синхронно-синфазного режима, при этом скорость изменения частоты синхронизируемого агрегата устанавливается максимально возможной для равномерного регулирования, т.е. sup col «() ftWTa, а верхняя граница допустимых значений начального скольжения выбирается из соображений возможности достижения требуемого режима при установленной скорости изменения скольжения, т.е. sup ftfe 2 (1 -e ) 1 ил.
| Константинов В.А | |||
| Система и устройства автоматизации судовых электроэнергетических установок | |||
| - Л.: Судостроение, 1972, с | |||
| Судно | 1918 |
|
SU352A1 |
| Устройство для автоматической синхронизации синхронного генератора | 1983 |
|
SU1173489A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматической синхронизации генераторов переменного тока | 1984 |
|
SU1238189A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
