10
15
20
Изобретение относится к вычислительной технике и может использоваться для фильтрации цифровых сигналов в различных системах обработки информации.
Цель изобретения - новышение точности за счет подавления коррелированных помех улучшением устойчивости процедуры вычисления весового вектора путем отыскания квазирешений системы линейных уравнений на компактном множестве значений весового вектора.
На фиг. 1 изображена структурная схема адаптивного цифрового фильтра; на фиг. 2 - структурная схема узла вычисления вектора; на фиг. 3 - структурная схема весового узла; на фиг. 4 - структурная схема узла вычисления собственных значений; на фиг. 5 - структурная схема узла селекции; на фиг. 6 - структурная схема узла перехода; на фиг. 7 - схема коррелятора; на фиг. 8 - схема накопителя; на фиг. 9 - управляющие сигналы на выходах синхронизатора.
Предлагаемый фильтр содержит ключи 1 и 2, коррелятор 3, блок 4 определения весовых коэффициентов, элементы 5 задержки, умножители 6, сумматор 7, синхронизатор 8. Блок 4 определения весовых коэффициентов содержит узел 9 вычисления собственных значений, узел 10 вычисления вектора, делители 11, узлы 12 селекции, узел 13 перехода.
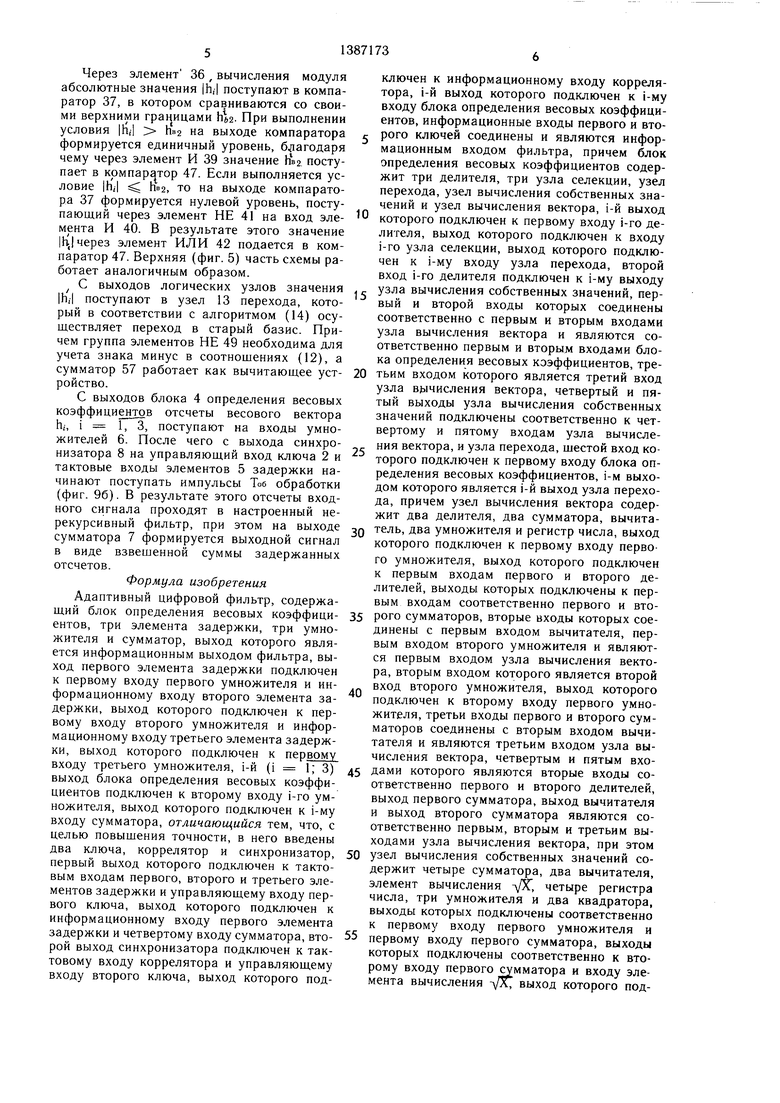
Узел 9 вычисления вектора (фиг. 2) содержит умножитель 14, весовой узел 15, делители 16 и 17, сумматор 18, вычитатель 19, сумматор 20. Весовой 15 узел (фиг. 3) содержит умножитель 21 и регистр 22 числа.
Узел 9 вычисления собственных значений (фиг. 4) содержит квадратор 23, ве- 35 совой узел 24, сумматор 25, элемент 26 вычислений ух (квадратного корня), квадратор 27, вычитатель 28, весовой узел 29, сумматоры 30 и 31, весовой узел 32, сумматор 33, регистр 34 числа, вычитатель 35.
Узел 12 (фиг. 5) содержит элемент 36 вычисления модуля, компаратор 37, регистр 38 (хранения верхней границы), элементы И 39 и 40, элемент НЕ 41, элемент ИЛИ 42, регистр 43 (хранения нижней границы), элеАдаптивный режекторный фильтр, синтезированный в соответствии с адаптивным байесовским подходом по критерию максимума коэффициента подавления помехи, использует для вычисления весового вектора Н (h:, h2,..., hN) следующий алгоритм: А,
RH -В; Н -R В.
л J „
где ,/1 - оценка корреляционной матрицы помехи; В Ре - оценка корреляционного
вектора; Р( /, р -оценка коэффициентов кор реляции,
i, J, 1 1,N (N - порядок фильтра). Так как процесс измерения параметров помехи сопровождается ошибками (т.е. R R + 6R, Ё В -f бВ, где R, В - истинные значения корреляционных характеристик, 8R, бВ - матрица и вектор ощи- бок), то вектор Н, полученный из решения системы уравнений (1), отличается от своего оптимального значения Но В:
Н Но + бН.
При этом относительное по норме возмущение весового вектора АН ||6Н||/||Н|| можно определить при помощи следующего соотношения: АН condR(AR-i-AB)/(l-ARcondR), (3
где AR I16R||/||R||, АВ ||бВ||/||В|| относительные возмущения матрицы и вектора;
cond R А,макс./Я,мин - число обусловленности матрицы;
лиин, А.«акс - минимальное и максимальное собственные значения матрицы R;
11-11 - означает норму матрицы или вектора.
Из анализа (3) следует, что в случае сильно коррелированных помех, характеризующихся плохо обусловленной корреляционной матрицей (cond R - оо), вычисленное значение вектора Н может значительно отли- чаться от своего оптимального значения Но, что приводит к существенному снижению эффективности подавления помех.
Получение устойчивых решений системы
25
30
менты И 44 и 45, элемент НЕ 46, компара- .г уравнений (1) возможно лишь при условии,
тор 47 и элемент ИЛИ 48.
Узел 13 перехода (фиг. 6) содержит группу элементов НЕ 49, весовой узел 50, делители 51 и 52, умножители 53 и 54, сумматоры 55-57.
Коррелятор 3 (фиг. 7) содержит регистр 50 58 сдвига, первый 59, второй 60 и третий 61 умножители, квадратор 62, накопители 63-66 и три делителя 67-69.
Каждый из накопителей (фиг. 8) содержит регистр 70 сдвига, сумматор 71, счетчик 72, компаратор 73, регистр 74 числа и эле- 55 мент И 75.
Цифровой фильтр работает следующим образом.
когда значения вектора Н образуют компактное множество. В этом случае применение метода квазирешений плохо обусловленных систем линейных уравнений приводит к следующему алгоритму. Пусть все значения весового векторра Н принадлежат компактному множеству F : . Тогда в качестве решения системы уравнений (1) берется такой вектор , что
IIRH + ВЦ inf II RH +ВЯ. (4) Рассмотрим расширенный- весовой вектор Н (ho, Н), который определяется из решения расширенной системы уравнений RH О,(5)
0
5
0
5
Адаптивный режекторный фильтр, синтезированный в соответствии с адаптивным байесовским подходом по критерию максимума коэффициента подавления помехи, использует для вычисления весового вектора Н (h:, h2,..., hN) следующий алгоритм: А,
RH -В; Н -R В.
л J „
где ,/1 - оценка корреляционной матрицы помехи; В Ре - оценка корреляционного
вектора; Р( /, р -оценка коэффициентов кор реляции,
i, J, 1 1,N (N - порядок фильтра). Так как процесс измерения параметров помехи сопровождается ошибками (т.е. R R + 6R, Ё В -f бВ, где R, В - истинные значения корреляционных характеристик, 8R, бВ - матрица и вектор ощи- бок), то вектор Н, полученный из решения системы уравнений (1), отличается от своего оптимального значения Но В:
Н Но + бН.
При этом относительное по норме возмущение весового вектора АН ||6Н||/||Н|| можно определить при помощи следующего соотношения: АН condR(AR-i-AB)/(l-ARcondR), (3)
где AR I16R||/||R||, АВ ||бВ||/||В|| относительные возмущения матрицы и вектора;
cond R А,макс./Я,мин - число обусловленности матрицы;
лиин, А.«акс - минимальное и максимальное собственные значения матрицы R;
11-11 - означает норму матрицы или вектора.
Из анализа (3) следует, что в случае сильно коррелированных помех, характеризующихся плохо обусловленной корреляционной матрицей (cond R - оо), вычисленное значение вектора Н может значительно отли- чаться от своего оптимального значения Но, что приводит к существенному снижению эффективности подавления помех.
Получение устойчивых решений системы
5
0
.г уравнений (1) возможно лишь при условии,
уравнений (1) возможно лишь при условии,
когда значения вектора Н образуют компактное множество. В этом случае применение метода квазирешений плохо обусловленных систем линейных уравнений приводит к следующему алгоритму. Пусть все значения весового векторра Н принадлежат компактному множеству F : . Тогда в качестве решения системы уравнений (1) берется такой вектор , что
IIRH + ВЦ inf II RH +ВЯ. (4) Рассмотрим расширенный- весовой вектор Н (ho, Н), который определяется из решения расширенной системы уравнений RH О,(5)
где R pi mi - расширенная корреляционная матрица, k, m О, N.
Из формулы (5) при ho 1 следует система уравнений (1). Допустим, что p,x-tiii- - 1 (сильно коррелированная помеха). Тог- да решением истемы (5) служить такой вектор Н (ho,...,hN), составляющие которого удовлетворяют условию
2h,- 0.
Соотношению (6) отвечает вектор с биномиальными коэффициентами:
jho 1, hi (-1) CN, i 1, N, где CN -число сочетаний из N по i.
Отсюда следует, что каждая координата вектора Н не превосходит некоторой константы
h, hi,(7)
а, следовательно, множество значений вектора Н образуют N-мерный параллелепипед и является компактным. Предположим, что корреляционная матрица помехи R при- иадлежит некоторому априорно известному классу матриц: R6D, характеризующемуся двумя граничными матрицами DI и D2. Ис- ходя из этого, для каждой координаты вектора определяются нижняя и верхняя границы и Ьв2 с учетом полученных границ и соотношений (4) и (7) определяется алгоритм для вычисления весового век
тора:
(8)
/
h, h;, если Ь2 h, Нв2; h, hp2, если h,
h, Ьн2, если h; Ь н2.
Алгоритм (8) обладает свойством устойчивости, так как решение плохо обусловленной системы линейных уравнений ищет- ся на компактном множестве F.
С использованием алгоритма (8) синтезирован нерекурсивный режекторный фильтр третьего порядка.
Для избежания трудоемкой операции обрашения матрицы используют ортогональное преобразование (характеризуюшееся матрицей С) такое, что
с RC Л,
где Л (Лмин,...,Лмакс) - диагональная матри-
ца из собственных значений.
Собственные числа корреляционной матрицы R определяются соотношениями
л,)1+а; Л2 1 - р2;
д,(Р.),| +,
с учетом которых матрица С принимает вид
1 -1 2р,/а О 11
1
2р./Ь
Преобразование (9) переводит систему уравнений (1) в базис из собственных векторов матрицы:
5
10
15
25 RH -В ЛН -D ,
(12)
где D С В - корреляционный вектор помехи в базисе из собственных векторов, составляющие которого без учета знака в соотношении (12) определяются следующим образом: di PI + 2pip2/a + рз;
d2 -pi + РЗ;(13)
da PI + 2pip2/e + рз.
Для перехода в старый базис используется преобразование Н СН, которое в координатной форме принимает вид h| HI-Ь2- -Ьз;
,h ,/a + 2p,h3/B;(Mj
Из hi h2 + ha.
С выхода синхронизатора 8 на управляющий вход ключа 1 начинают поступать импульсы То оценки (фиг. 9а), в результате чего цифровые отсчеты входного сигнала поступают в коррелятор 3 (фиг. 7), который производит оценку коэффициентов корреляции помехи в соответствии с алгоритмом
p,,
(15)
35
о
45
50
55
гдеи(п -отсчеты входного сигнала;
М - объем выборки оценивания.
С выходов умножителей 59-61 и квадратора 62 отсчеты сигнала поступают в накопители 63-66 (фиг. 8). Счетчик 72 производит подсчет числа импульсов То, при этом его выходной код поступает в компаратор 73, на другой вход которого с выхода регистра 74 числа подается код числа М. В момент равенства кодов на выходе компаратора 73 формируется единичный сигнал (уровень) и через элемент И 75 накопленные значения сигналов поступают в делители 67-69, на выходах которых в соответствии с (15) формируются оценки коэффициентов корреляции.
Полученные таким образом значения pi, i : 1, 3, поступают в узел 9 вычисления- собственных значений матрицы R, который в соответствии с алгоритмом (10) определяет величины а, в, Ai, Л2 и АЗ. Узел. 10 вычисления вектора D по оценкам pi, i 1,3, и значениям а и в, которые поступают на его входы с выходов узла 9, определяет в соответствии с (13) компоненты вектора DI. После чего на выходах делителей 11 формируются составляющие весового вектора в базисе из собственных векторов
hi di/Ai, i ГЗ,
поступающие в узлы 12, реализующие операцию (8).
Через элемент 36 , вычисления модуля абсолютные значения |h,-| поступают в компаратор 37, в котором сравниваются со своими верхними границами h. При выполнении условия iriil Н в2 на выходе компаратора формируется единичный уровень, благодаря чему через элемент И 39 значение Нв2 поступает в компаратор 47. Если выполняется условие |h /| : , то на выходе компаратора 37 формируется нулевой уровень, поступающий через элемент НЕ 41 на вход элемента И 40. В результате этого значение |hij через элемент ИЛИ 42 подается в компаратор 47. Верхняя (фиг. 5) часть схемы работает аналогичным образом.
С выходов логических узлов значения |h,| поступают в узел 13 перехода, который в соответствии с алгоритмом (14) осуществляет переход в старый базис. Причем группа элементов НЕ 49 необходима для учета знака минус в соотношениях (12), а сумматор 57 работает как вычитающее устройство.
С выходов блока 4 определения весовых коэффициентов отсчеты весового вектора h;, i 1, 3, поступают на входы умножителей 6. После чего с выхода синхронизатора 8 на управляющий вход ключа 2 и тактовые входы элементов 5 задержки начинают поступать импульсы Тов обработки (фиг. 96). В результате этого отсчеты входного сигнала проходят в настроенный нерекурсивный фильтр, при этом на выходе сумматора 7 формируется выходной сигнал в виде взвешенной суммы задержанных отсчетов.
Формула изобретения
Адаптивный цифровой фильтр, содержащий блок определения весовых коэффициентов, три элемента задержки, три умножителя и сумматор, выход которого является информационным выходом фильтра, выход первого элемента задержки подключен к первому входу первого умножителя и информационному входу второго элемента задержки, выход которого подключен к первому входу второго умножителя и информационному входу третьего элемента задержки, выход которого подключен к первому входу третьего умножителя, i-й (i 1; 3) выход блока определения весовых коэффициентов подключен к второму входу i-ro умножителя, выход которого подключен к i-му входу сумматора, отличающийся тем, что, с целью повыщения точности, в него введены два ключа, коррелятор и синхронизатор, первый выход которого подключен к тактовым входам первого, второго и третьего элементов задержки и управляющему входу первого ключа, выход которого подключен к информационному входу первого элемента задержки и четвертому входу сумматора, второй выход синхронизатора подключен к тактовому входу коррелятора и управляющему входу второго ключа, выход которого под0
0
5
0
5
0
5
0
5
ключен к информационному входу коррелятора, i-й выход которого подключен к i-му входу блока определения весовых коэффициентов, информационные входы первого и второго ключей соединены и являются информационным входом фильтра, причем блок определения весовых коэффициентов содержит три делителя, три узла селекции, узел перехода, узел вычисления собственных значений и узел вычисления вектора, i-й выход которого подключен к первому входу i-ro делителя, выход которого подключен к входу 1-го узла селекции, выход которого подключен к i-му входу узла перехода, второй вход i-ro делителя подключен к i-му выходу узла вычисления собственных значений, первый и второй входы которых соединены соответственно с первым и вторым входами узла вычисления вектора и являются соответственно первым и вторым входами блока определения весовых коэффициентов, третьим входом которого является третий вход узла вычисления вектора, четвертый и пятый выходы узла вычисления собственных значений подключены соответственно к четвертому и пятому входам узла вычисления вектора, и узла перехода, шестой вход которого подключен к первому входу блока определения весовых коэффициентов, i-м выходом которого является i-й выход узла перехода, причем узел вычисления вектора содержит два делителя, два сумматора, вычита- тель, два умножителя и регистр числа, выход которого подключен к первому входу первого умножителя, выход которого подключен к первым входам первого и второго делителей, выходы которых подключены к первым входам соответственно первого и второго сумматоров, вторые входы которых соединены с первым входом вычитателя, первым входом второго умножителя и являются первым входом узла вычисления вектора, вторым входом которого является второй вход второго умножителя, выход которого подключен к второму входу первого умножителя, третьи входы первого и второго сумматоров соединены с вторым входом вычитателя и являются третьим входом узла вычисления вектора, четвертым и пятым входами которого являются вторые входы соответственно первого и второго делителей, выход первого сумматора, выход вычитателя и выход второго сумматора являются соответственно первым, вторым и третьим выходами узла вычисления вектора, при этом узел вычисления собственных значений содержит четыре сумматора, два вычитателя, элемент вычисления д/Х четыре регистра числа, три умножителя и два квадратора, выходы которых подключены соответственно к первому входу первого умножителя и первому входу первого сумматора, выходы которых подключены соответственно к второму входу первого сумматора и входу элемента вычисления , выход которого подключей к первым входам первого вычислителя и второго сумматора, выходы которых подключены к первым входам соответственно второго и третьего умножителей, выходы которых подключены к первым входам соответственно третьего и четвертого сумматоров, вторые входы которых соединены с первым входом второго вычитателя и подключены к выходу первого регистра числа, вторые входы первого, второго и третьего умножителей подключены к выходам соответственно второго, третьего и четвертого регистров числа, вход первого квадратора является первым входом узла вычисления собственных значений, вторым входом которого являются соединенные между собой вход второго квадратора, вторые входы первого и второго вычитателей и второй вход второго сумматора, выходы второго и третьего умножителей являются соответственно четвертым и пятым выходами узла вычисления собственных значений, первым, вторым и третьим выходами которого являются выходы соответственно третьего сумматора, второго вычитателя и четвертого сумматора, причем каждый узел селекции содержит два регистра, четыре элемента И, два элемента НЕ, два компаратора, два элемента ИЛИ и элемент вычисления модуля, выход которого подключен к первому входу первого элемента И и первому входу первого компаратора, выход которого подключен к первому входу второго элемента И и входу первого элемента НЕ, выход которого подключен к второму входу первого элемента И, выход которого подключен к первому входу первого элемента ИЛИ, выход которого подключен к первым входам третьего элемента И и второго компаратора, выход которого подключен к второму входу третьего элемента И и входу второго элемента НЕ, выход которого подключен к пер0
5
0
5
0
5
вому входу четвертого элемента И, выход которого подключен к первому входу второго элемента ИЛИ, второй вход которого подключен к выходу третьего элемента И, выход первого регистра подключен к вторым входам первого компаратора и второго элемента И, выход которого подключен к второму входу первого элемента ИЛИ, выход второго регистра подключен к вторым входам второго компаратора и четвертого элемента И, вход элемента вычисления модуля является входом узла селекции, выходом которого является выход второго элемента ИЛИ, при этом узел перехода содержит три сумматора, два делителя, три умножителя, регистр числа и группу элементов НЕ, выход первого элемента НЕ группы подключен к первым входам первого сумматора и первого умножителя, выход которого подключен к первому входу второго сумматора, второй вход которого подключен к выходу второго умножителя, первый вход которого соединен с вторым входом первого сумматора и подключен к выходу второго элемента НЕ группы, выход второго элемента которой подключен к третьему входу первого сумматора, выход третьего умножителя подключен к первым входам первого и второго делителей, выходы которых подключены к вторым входам соответственно первого и второго умножителей, i-й (, 3) вход третьего сумматора соединен с входом i-ro элемента НЕ группы и является i-м входом узла перехода, i-м выходом которого является выход i-ro сумматора, вторые входы первого и второго делителей являются соответственно четвертым и пятым входами узла перехода, шестым входом которого является первый вход третьего умножителя, второй вход которого подключен к выходу регистра числа.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ РЕЖЕКТОРНЫЙ ФИЛЬТР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2005 |
|
RU2280262C1 |
| ЦИФРОВОЙ РАДИОПЕЛЕНГАТОР | 1997 |
|
RU2115135C1 |
| ЦИФРОВОЙ РАДИОПЕЛЕНГАТОР | 1999 |
|
RU2149419C1 |
| Устройство для решения систем линейных алгебраических уравнений | 1986 |
|
SU1325508A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| УСТРОЙСТВО ДЛЯ АДАПТИВНОГО ПОДАВЛЕНИЯ ПОМЕХ | 1990 |
|
SU1802616A1 |
| Адаптивный фильтр | 1983 |
|
SU1116537A1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ СОБСТВЕННЫХ ЗНАЧЕНИЙ (N X N)-МАТРИЦЫ | 1992 |
|
RU2012050C1 |
| Сглаживающее устройство | 1984 |
|
SU1265797A1 |
| ПРИЕМНИК ДЛЯ РЕЛЬСОВОЙ ЦЕПИ | 1995 |
|
RU2091262C1 |

Изобретение относится к области вычислительной техники и может быть использовано для фильтрации цифровых сигнаTffjrm 5л. лов в различных системах обработки информации. Цель изобретения - увеличение точности за счет подавления коррелированных помех улучшением устойчивости процедуры вычисления весового вектора путем отыскания квазирешения системы линейных уравнений на компактном множестве значений весового вектора. Поставленная цель достигается за счет того, что в состав устройства входят ключи 1, 2, коррелятор 3, блок 4 определения весовых коэффициентов, элементы 5 задержки, умножители 6, сумматор 7, синхронизатор 8. Блок определения весовых коэффициентов содержит узел 9вычисления собственных значений, узел 10вычисления вектора, делители 11, узлы 12 селекции, узел 13 перехода. 9 ил. & (Л 00 оо со
фиг. 2
Т
Фиг.З
| Устройство для вычисления свертки | 1979 |
|
SU800995A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Гольденберг Л | |||
| М., Матюшина Б | |||
| Д., Поляк М | |||
| Н | |||
| Цифровая обработка сигналов | |||
| - М.: Радио и связь, 1985, с | |||
| Устройство для отыскания металлических предметов | 1920 |
|
SU165A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
