Изобретение относится к радиотехнике и может быть использовано в радиоприемных устройствах для подавления корреляционных помех,, например, в связных радиолиниях.
Цель изобретения - повышение точности фильтрации путем увеличения подавления корреляционных помех.
Па фиг.1 изображена структурная электрическая схема адаптивного цифрового фильтра; на фиг.2 - структурная схема блока-вычисления весовых коэ(г- фициентов; на фиг.З - структурная схема блока определения параметра аппрок симации; на фиг.А - схема первого функционального преобразователя; на фиг.З - схема второго функционального преобразователя; на фиг.6 - схема блока вычисления логарифма; на фиг.7 - схема блока вычисления экспоненты; на фиг.8 - схема блока оценки коэффициентов корреляции; на фиг.9 - схема накопителя; на фиг.10 - эпюры напряжений на выходах блока синхронизации, поясняющие работу адаптивного цифрового фильтра.
Адаптивный цифровой фильтр содержит первый 1 и второй 2 ключи,-блок-3 оценки коэффициентов корреляции, ,блок 4 вычисления весовых коэффициентов, блок 5 определения параметра аппроксимации, с первого по четвертьй блоки 6 задержки, с первого по третий умножители 7, су1мматор 8 и блок 9 синхронизации.
Блок 4 вычисления весовых коэффициентов образуют первый 0 и второй 1 квадраторы,первый сумматор 12, первый умножитель 13, второй сумма- тор 14, второй умножитель 15j первый инвертор 16, nepBbrii весовой блок 17, блок )8 вычитания, регистр J9, второй инвертор 20,третий умножитель 21 , третий сумматор 22,, второй весовой блок 235 а также первый 24 и второй 25 функциональные преобразователи.
Блок 5 определения параметра ап- проксимации включает первый 26 и второй 27 блоки вычисления логарифма, регистр 28, первый блок 29 деления,, третий блок 30 вычиапения логарифма и второй блок 31 деутения.
Первый функциональный преобразователь 24 содержит блок 32 вычисления логарифма, уьп-южитель 33 и блок 34 вычисления экспоненты.
Второй функциональный преобразователь образуют умножитель 35, регистр 36 и блок 37 вычисления экспоненты .
Блоки 26, 27, 30 и 32 вычисления логарифма содержат регистр 38, сумматор 39, блок 40 вычитания, блок 41 деления, k блоков 42 возведения в степень, k весовых блоков 43 и выходной сумматор 44.
Блоки 34 и 37 вычисления экспоненты содержат k блоков 45 возведения в степень, k весовых блоков 46, сумматор 47 и регистр 48.
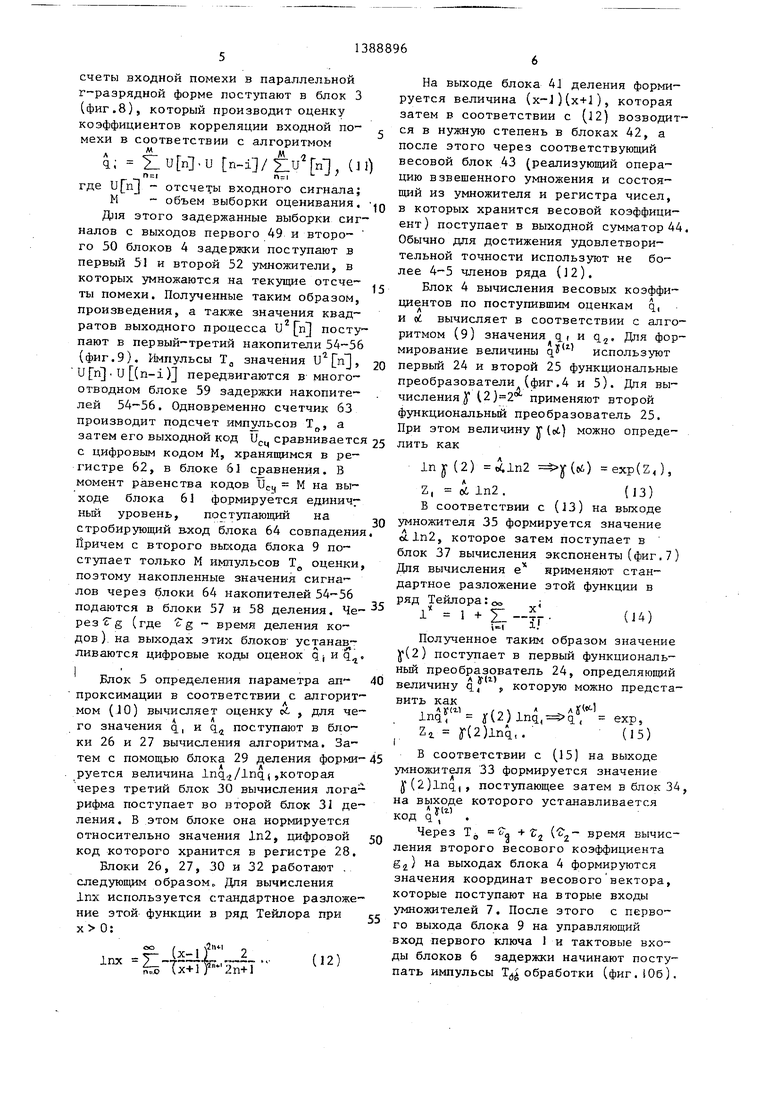
Блок 3 оценки коэффициентов корреляции включает первый 49 и второй 50 блоки задержки, первый 51 и второй 52 умножители, квадратор 53, с первого по третий накопители 54-56, а также первый 57 и второй 58 блоки деления. Накопители 54-56 содержат многоотводный блок 59 задержки, сумматор 60, блок 6J сравнения, регистр 62, счетчик 63 и блок 64 совпадения.
Адаптивный цифровой фильтр работает следующим образом.
В адаптивном режекторном фильтре с прямыми связями, синтезированном, в соответствии с адаптивным байесовским подходом по критерию максимального коэффициента подавления помехи, используется дпя вычисления весового вектора следующий алгоритм
QG D ,(1)
Л Г 1
где Q. /Ч-/; / { оценка максимального правдоподобия корреляционной мач- ,рицы помехи;
j4.ej оценка максимально- Г о правдоподобия корреляционного вектора помехи;
Ч.(;.;|э0.р - оценки коэффициентов корреляци по мехи;
i,j KN-D,
К - порядок фильтра;
G (q.,,...qj- весовой вектор фильтра;
1 1 N X - 1 , 1.V .
Однако процесс измерения корреляционных характеристик сопровождаятся ошибками, поэтому полученные зна ге- НИН Q и D отличаются от своих истинных значений Q и D соо1ве-г(:-гнг-м1и на матрицу и вектор о 1Ибок -, . При этом весовой вектор I, ojip ,ЧР - ный из системы (1), отличается от своего оптимального значения G
Q D на величину 8 G. Относительно по норме возмущение весового вектора с ЬО -( /I/O/I можно определить с помощью соотношения
&G condQ( Q + ь D) (1- А QcondQ), (2) де Q IfJQI/ / // О // ,
ЛБ / /ID// - относитель- ю
ные возмущения матрицы и век- Topaj
condQ p l,, - число обусловленности кор- ) реляционной матрицы помехи;(макс ( мин - максимальное
20
и минимальное собственные значения матрицы ;
//// обозначает норму вектора согласованную с ней норму матрицы. 25
Из (2) следует, что в случае сильо коррелированных помех, характеризующихся плохо обусловленной корреляионной матрицей (cond Q оо ) выисленное значение G может сильно ,,, тличаться от своего оптимального значения G, что приводит к существенному снижению эффективности подавления коррелированных помех.
Рассмотрим следующую систему линейных уравнений:35 QG - D, (3) Рещая систему уравнений (3), весо- вые коэффициенты фильтра g; i IN,
можно выразить как отношение двух по-
40
линомиальных функции:
g; Р; (q; ... q J/S;( q, . . .qj . (4) Для помех, корреляционные матрицы которых являются теплицевыми, справедливо соотношение45
dl-qV,(5)где J (i)i° , 1 & oL и. 2 - параметр, зависящий от модели рассматриваемой помехи.
С учетом (5) выражение (4) при- 0 водят к виду
r- eQUVV-).), (б)-.
где q и q7 - корни полиномов 1; и S1. .55
При этом среди множества корней q и qT найдутся такие, что I q - q.,hO и (qT - q, при q4 1, а формула (6) переходит в отношение
двух бесконечно малых величин. Так как норма весово о вектора является ограниченной Ц , то подмно- . жества корней полиномов числителя и знаменателя (4), дающих неустойчивость алгоритма, при условии (5) совпадают, а следовательно, при конкретном значении 1 otj 6 2 алгоритмы (6) приводятся к устойчивому ВИДУ L,-T р
q; и (q -q,)/n ( -q . )
С - 1
.q, (oij )(7J
где - размерность подмножества неустойчивых корней.
Таким образом, на множестве ci можно получить устойчивые значения весового вектора G (ы-j ), j l,P, (р - число точек аппроксимации), с использование метода наименьших квадратов весовой вектор G аппроксимируется по всему множеству fui по каждой координате q; . Для этого решают
(8)
систему уравнении
X .()- , где g; X,(i + аппроксимированный весовой козф- фициент;
X (Х(,Х,) - вектор аппроксимирующих коэффициентов;
А - матрица размерности рх2, j-я строка которой есть (J, ot j );
Y - вектор размерности р, Y
(j ), J 1, р.
с использованием описанной проце- дуры был синтезирован адаптивный цифровой фильтр четвертого порядка, весовые коэффициенты которого определяются соотношениями:
So - g4 1. 62 7.2 ГбЛ. , S. -g, -q, С(24: 4) , X (i -1) + 1. (9)
л
При этом в качестве параметра об можно использовать оценку максимального правдоподобия, которая следует из (5), при i 2:
In in .
ОС - и.--..-.---.---.-.---.. ,
1п2
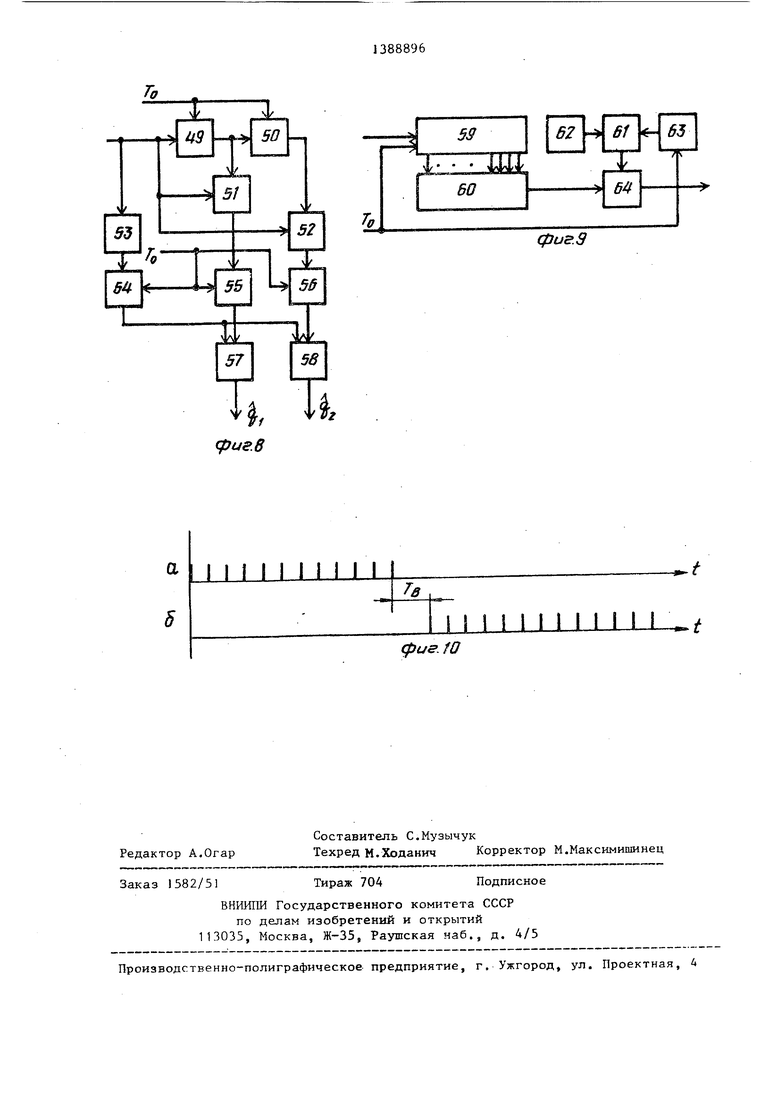
В начале работы адаптивного цифрового фильтра с второго выхода блока на управляющий вход второго ключа 2 начинают поступать импульсы Т оценки (фиг.Юа), в результате чего от(10)
20
четы входной помехи в параллельной -раэрядной форме поступают в блок 3 (фиг.8), который производит оценку оэффициентов корреляции входной по- j. мехи в соответствии с алгоритмом
4; .u n-ij/fiT/rn. (л)
| --
где Ufnj - отсчеты входного сигнала;
М - объем выборки оценивания. .Q Для этого задержанные выборки сигалов с выходов первого 49 и второго 50 блоков 4 задержки поступают в ервый 51 и второй 52 умножители, в которых умножаются на текущие отсчеты помехи. Полученные таким образом, роизведения, а также значения квадратов выходного процесса поступают в первый-третий накопители 54-56 {фиг.9). 1-1мпульсы Тд значения , и п . и (n-i )J передвигаются в многоотводном блоке 59 задержки накопителей 54-56. Одновременно счетчик 63 производит подсчет импульсов Т, а затем его выходной код сравнивается 25 с цифровым кодом М, хранящимся в регистре 62, в блоке 6 сравнения. В момент равенства кодов М на выходе блока 61 формируется единичт- ный уровень, поступающий на стробирующий в,ход блока 64 совпадения. Йричем с второго блока 9 поступает только М импульсов Тр оценки, поэтому накопленные значения сигналов через блоки 64 накопителей 54-56 подаются в блоки 57 и 58 деления. Че- pes c g (где 2 g - время деления кодов), на выходах этих блоков устангш- ливаются цифровые коды оценок qj и q.
Блок 5 определения параметра ап- 40 проксимации в соответствии с алгоритмом (-10) вычисляет оценку ci , для чего значения 4i и q, поступают в блоки 26 и 27 вычисления алгоритма. Затем с помощью блока 29 деления форми- 45 руется величина lnq,j/lnq(,которая через третий блок 30 вычисления логарифма поступает во второй блок 31 деления. В этом блоке она нормируется относительно значения 1п2, цифровой зо код которого хранится в регистре 28.
Блоки 26, 27, 30 и 32 работают , следующим образом,, Для вычисления inx используется ст.:Шдартное разложение этой функции в ряд Тейлора при
00 / , v2lKl „
- L- -2 -
30
5
0 5 о
0
На выходе блока 4J деления формируется величина (x-l)(x+l), которая затем в соответствии с (12) возводится в нужную степень в блоках 42, а после этого через соответствующий весовой блок 43 (реализующий операцию взвешенного умножения и состоящий из умножителя и регистра чисел, в которых хранится весовой коэффициент) поступает в выходной сумматор 44. Обычно для достижения удовлетворительной точности используют не более 4-5 членов ряда (12).
Блок 4 вычисления весовых коэффициентов по поступившим оценкам q.
Л
и «(. вычисляет в соответствии с алгоритмом (9) значения q, и q. Для формирование величинь) используют первый 24 и второй 25 функциональные преобразователи (фиг.4 и 5). Дпя вычисления J (2) применяют второй функциональный преобразователь 25. При этом величину г (ci) можно определить как
In у (2) 4ln2 |C(ei) exp(Zj,
Z, (б 1п2.(13)
В соответствии с (13) на выходе умножителя 35 формируется значение е.1п2, которое затем поступает в блок 37 вычисления экспоненты (фиг,7 ) Для вычисления е нрименяют стандартное разложение этой функции в ряд Тейлора: ос, ;
1 1 + (J)
Полученное таким образом значение у(2) поступает в первый функциональный преобразователь 24, определяющий
А )f(2.)
величину q , которую можно представить как,,
1п4Г (2)1п4,Г ехр, Zi y(2)lnq,.(15)
В соответствии с (15) на выходе умножителя 33 формируется значение j (2)lnqj, поступающее затем в блок 34, на выходе которого устанавливается код 4V .
Через TO tTj ( время вычисления второго весового коэффициента g) на выходах блока 4 формируются значения координат весового вектора, которые поступают на вторые входы умножителей 7. После этого с первого выхода блока 9 на управляющий вход первого ключа 1 и тактовые входы блоков 6 задержки начинают поступать импульсы Т обработки (фиг.Юб).
В результате этого цифровые отсчеты входного сигнала проходят в настроенный адаптивный цифровой фильтр, а на выходе сумматора 8 суммирования формируется выходной сигнал в виде сз ммы взвешенных задержанных отсчетов. Формула изобретения
1. Адаптивный цифровой фильтр, со держащий последовательно соединенные первый ключ, вход которого является входом адаптивного цифрового фильтра, первьм, второй, третий, четвертый блоки задержки и сз матор, выход которого является выходом адаптивного цифрового фильтра, первый, второй и тре-. тий умножители, первые входы которых соединены соответственно с выходами первого, второго и третьего блоков задержки, а выходы подключены к второму, третьему и четвертому входам сумматора соответственно, пятый вход которого соединен с выходом первого ключа, блок вычисления весовых коэффициентов, первый, второй и третий выходы которого соединены с вторыми входами первого, второго и третьего умножителей соответственно, и блок синхронизации, выход которого соединен, с управляющим входом первого ключа и тактовыми входами первого, второго, третьего и четвертого блоков за
держки,о тличающийся тем.
что, с целью повьшения точности фильтрации, путем увеличения подавления коррелированных помех, введены последовательно соединенные второй ключ,вкод
которого соединен с входом первого ключа, блок оценки коэффициентов корреляции и блок определения параметра аппроксимации, второй вход которого соединен с вторым выходом .блока оцен ки коэффициентов корреляции, причем первый и второй входы блока вычисления весовых коэффициентов соединены с первым выходом блока оценки коэффициентов корреляции и с выходом блока определения параметра аппроксимации соответственно, а управляющий вход второго ключа и тактовый вход блока оценки коэффициентов корреляции соединены с вторым выходом блока синхронизации,
2. Фильтр non.J, отличающийся тем, что блок вычисления
5
0
- 05 ., 5
0
5
5
весовых коэффициентов содержит последовательно соединенные первый квадратор , второй квадратор, первый сумматор, первый умножитель, второй сумматор,в торой умножитель ипервьш инвер- тор первыйвесовой блок,вход и выход которого соединены соответственно с выходом первого квадратора и вторым входом первого сумматора, блок вычи-. тания, выход которого соединен с вторым входом первого умножителя, регистр, выход которого соединен с первым в-кодом блока вычитания и вторым входом второго сумматора, второй инвертор, выход которого соединен с вторым входом второго умножителя, последовательно соединенные тр.етий умножитель, первый вход которого соединен с выходом второго умножителя,третий сумматор и второй весовой блок, первьм функциональный преобразова-- тель, выход которого соединен с вторым входом третьего сумматора, и второй функциональный преобразователь, выход которого соединен с первым входом первого функционального преобразо вателя,, причем выходы второго умножителя, второго весового блока и первого инвертора являются соответственно первым, вторым и третьим выходами блока вычисления весовых коэффициентов, первым и вторым входом которого являются соответственно объединенные между собой входы первого квадратора, второго инвертора, вторые входы третьего умножителя, первого функционального преобразователя и объединенные между собой второй вход блока вычитания и вход второго функционального преобразователя.
3. Фильтр non.J, отли чаю- щ и и с я тем, что блок определения параметра аппроксимации содержит первый и второй блоки вычисления логарифма, регистр и последовательно сое- диненные первый блок деления, первый и второй входы которого соединены соответственно с выходами первого и второго блоков вычисления логарифма, третий блок вычисления.логарифма и второй блок деления, второй вход которого соединен с выходом регистра, а выход является выходом блока определения параметра аппроксимации, первым и вторым входами которого являются входы первого и второго блоков вычисления логарифма соответственно.
cfiusZ


| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный цифровой фильтр | 1987 |
|
SU1453593A2 |
| Адаптивный цифровой фильтр | 1987 |
|
SU1494212A1 |
| Адаптивное устройство анализа | 1986 |
|
SU1386938A1 |
| Адаптивный цифровой фильтр | 1986 |
|
SU1387173A1 |
| АДАПТИВНОЕ УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ | 1994 |
|
RU2097781C1 |
| Устройство для цифровой фильтрации | 1983 |
|
SU1113884A2 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ | 2009 |
|
RU2413238C1 |
| АДАПТИВНЫЙ ОБРАЩАЮЩИЙ ФИЛЬТР | 1994 |
|
RU2086999C1 |
| Адаптивный фильтр | 1983 |
|
SU1116537A1 |
| Анализатор спектра с линейным предсказанием | 1985 |
|
SU1275315A1 |

Изобретение относится к радио технике. Цель изобретения - повьшение точности фильтрации путем увеличения цодавления коррелированных помех.. Фильтр содержит ключ 1,6лок 4 вычисления весовых ко эф., четыре блока 6 задерж ки,три умножителя 7 ,сумматор 8 и блок 9 синхронизации. Введены ключ 2, блок 3 оценки коэф.корреляции, блок 5 определения параметра аппроксимации. По п.2 ф-лы блок 4 содержит два квадратора, три сумматора, три умножителя, два инвертора, два весовых блоков, блок вычитания, регистр, два функциональных преобразователя. По п.З блок 5 содержит три блока вычисления логарифма, регитр,- два блока деления. В данном фильтре с прямыми связями, синтезированном в соответствии с адаптивным байесовским подходом по критерию макс. коэф. подавления помехи, используется для вычисления весового вектора алгоритм Q,G D, где Q - Q-ii-j; J оценка макс .правдоподобия корреляционной матрицы помехи; D оценка макс.правдоподобия корреляционного вектора помехи; /i-j) -е оценка козф. корреляции помех; i,o l(N-l); N фильтра; G (q ...qц) тор фильтра; I 1, j. 10 ил. -порядок -весовой век- 2 3.п.ф-лы, (/ С
29
30
/7
L-3
фие.5
28
35
37
5
cpue.5
(ftиг. 6
.f
(ригЛ
5
U7
ffS
ЦБ
48
риг.7
ii Ti
us.8
фиг. 9
(риг. fO
| Патент США № 4349889, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
