qD 1
to to
3U9
Изобретение относится к радиотехнике и может быть использовано для фильтрации сигналов, заданных цифровыми кодами.
Цель изобретения повьппение точности фильтрации.
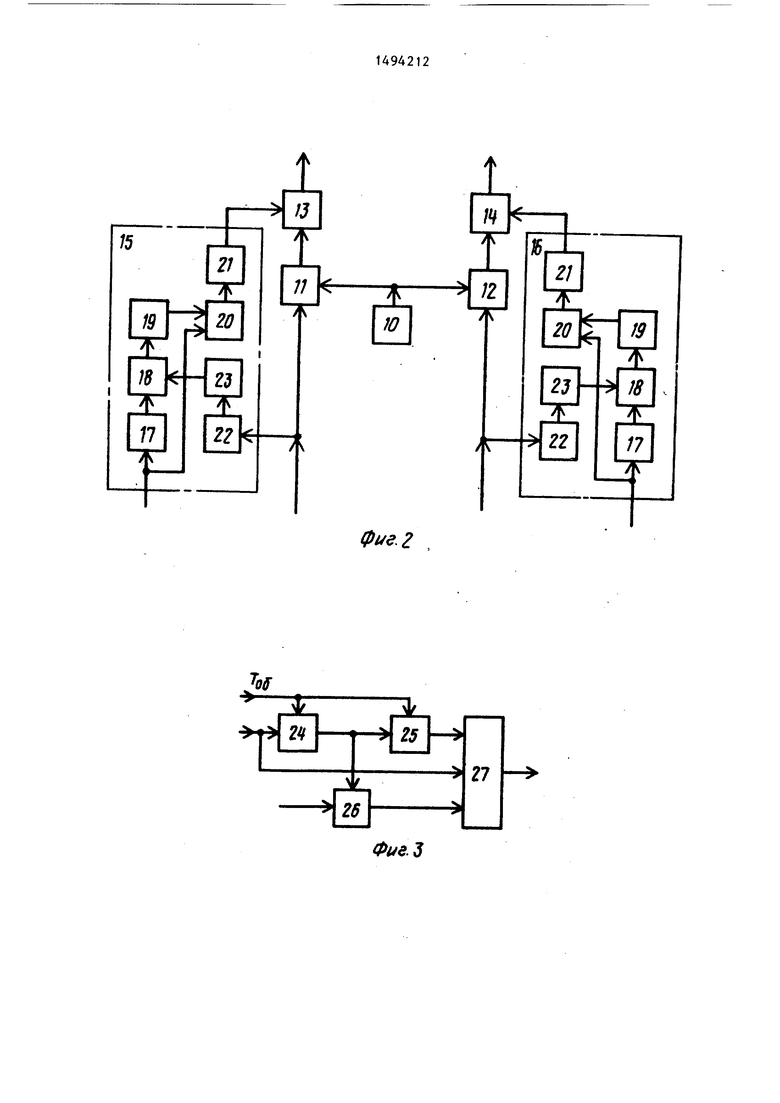
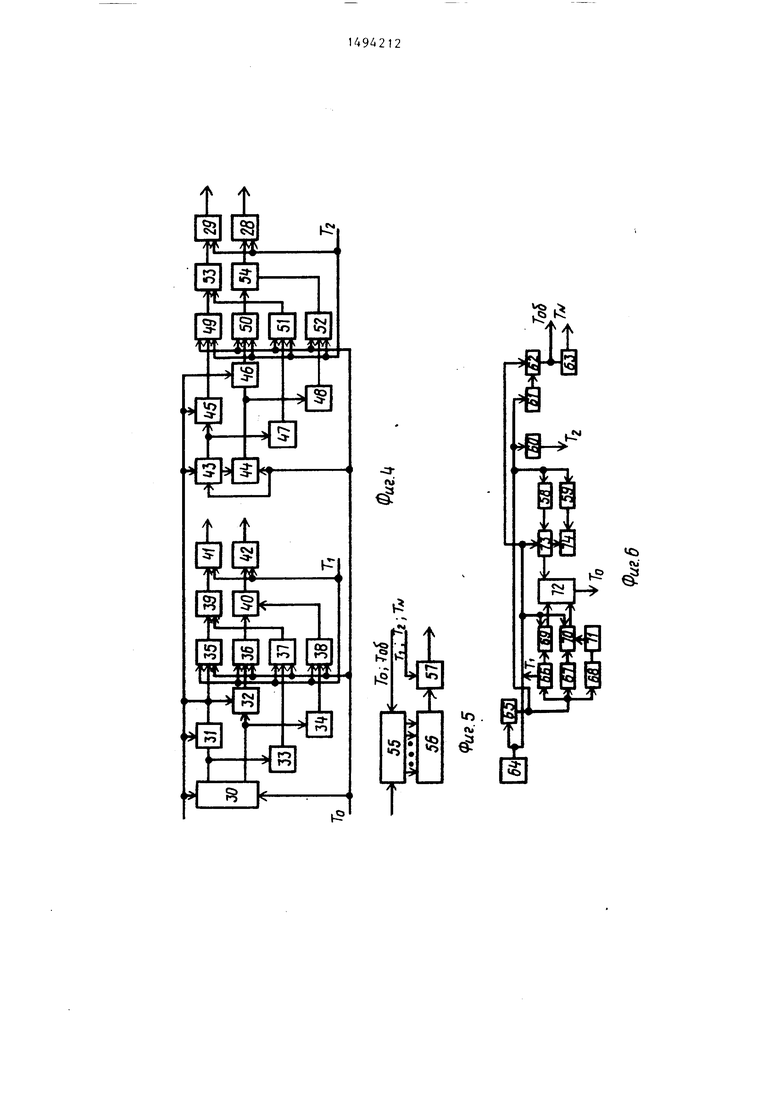
На фиг. 1 представлена электрическая структурная схема адаптивного цифрового фильтраj на фиг. 2 - схема блока вычисления весовых коэффициентов; на фиг. 3 - схема первого и второго нерекурсивных фильтров} на фиг. 4 - схема блока оценки коэффициентов корреляции; на фиг. 5 - схе- ма сумматора - накопителя} на фиг. 6 схема синхронизатора-, на фиг. 7-9 - временные диаграммы.
Адаптивный цифровой фильтр содержит первый 1 и второй 2 ключи, блок 3 оценки коэффициентов корреляции, блок 4 вычисления весовых коэффициентов, первый нерекурсивный фильтр 5, блок 6 формирования модуля, сумматор-накопитель 7, второй нерекур- сивный фильтр 8 и синхронизатор 9.
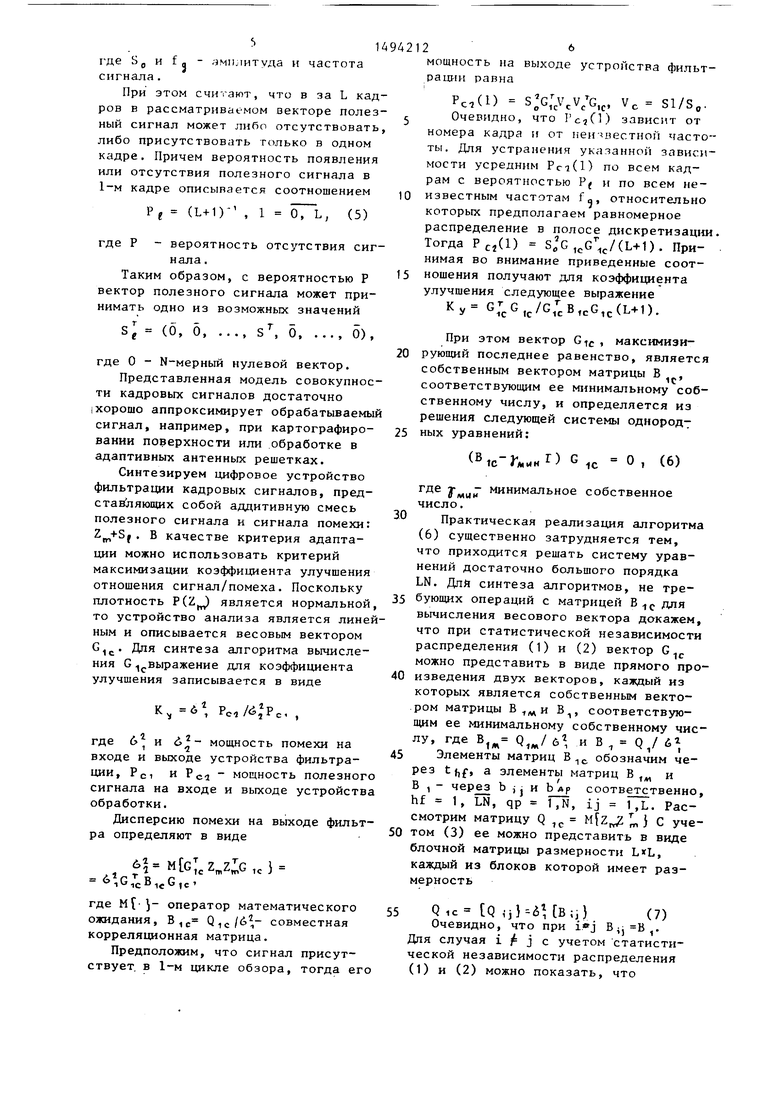
Блок 4 вычисления весовых коэффициентов состоит из регистра 10 числа первого 11 и второго 12 умножителей, первого 13 и второго 14 делителей, первого 15 и второго 16 вычислительных блоков, каждый из которых содержит первый квадратор 17, сумматор 18 блок 19 вычисления квадратного корня блок 20 вычитания, первый весовой умножитель 21, второй квадратор 22 и второй весовой умножитель 23.
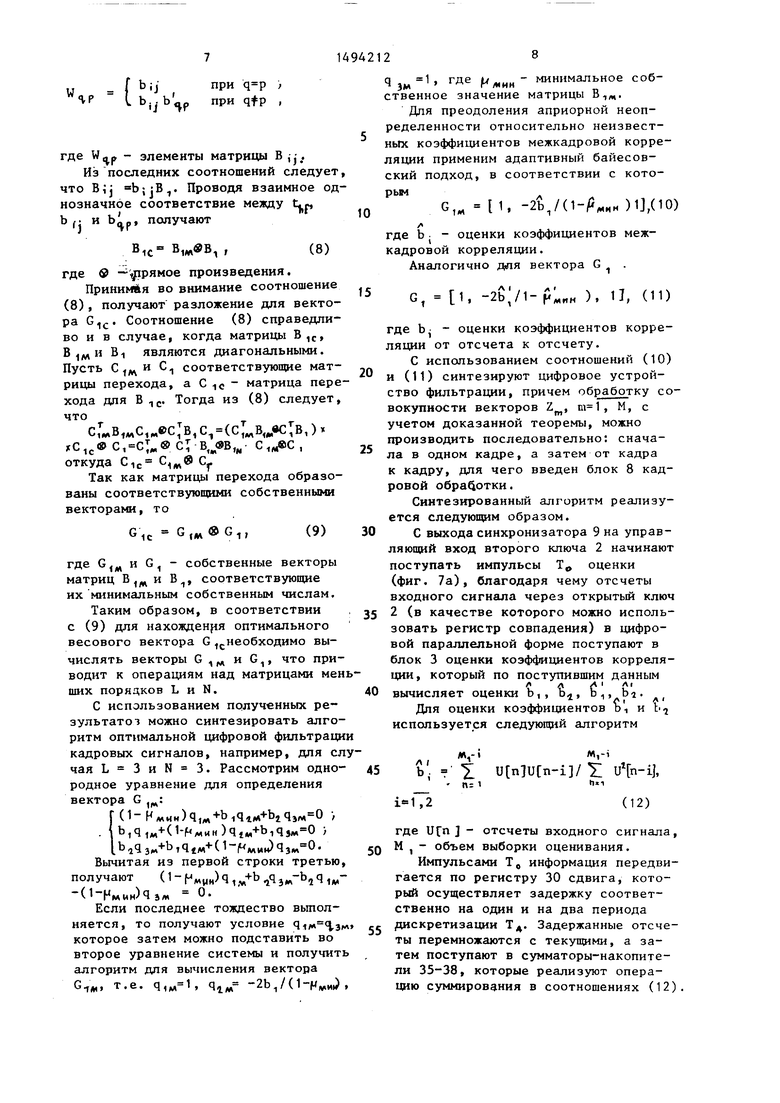
Первый 5 и второй 8 нерекурсивные фильтра образуют регистры 24 и 25 памяти, умножитель 26 и сумматор 27.
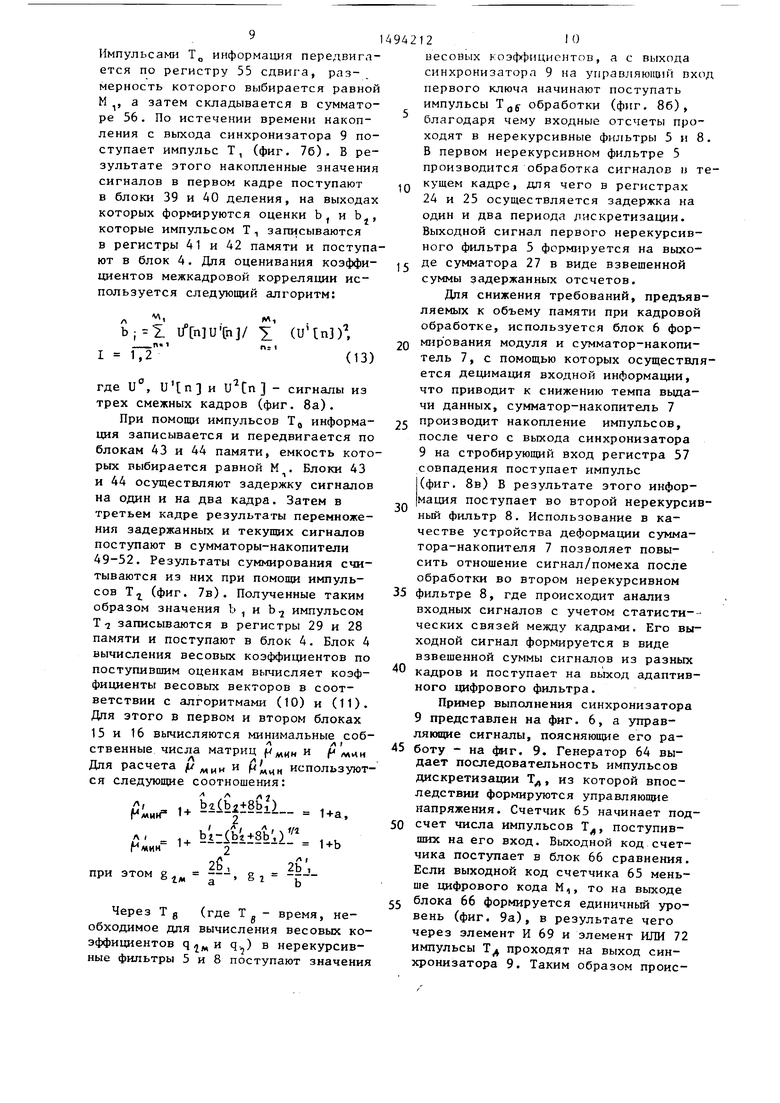
Блок 3 оценки коэффициентов корреляции выполнен на регистрах 28 и 29 памяти, регистре 30 сдвига, умножителях 31 и 32, квадраторах 33 и 34 сумматорах-накопителях 35-38, блоках 39 и 40 деления, регистрах 41 и 42 памяти, блоках 43 и 44 памяти, умножителях 45 п 46, квадраторах 47 и 48, сумматорах-накопителях 49-52 и блоках 53 и 54 деления.
Сумматор-накопитель состоит из
регистра 55 сдвига, сумматора 56 и и регистра 57 совпадения.
Синхронизатор содержит блоки 58- 60 сравнения, элемент И 61, блок 62 сравнения, делитель 63 частоты импульсов, ге нератор 64 тактовых импульсов, счетчик 65, блоки 66-68 сравнения, элементы И 69 и 70,- инвер24
тор 71, элемент ИЛИ 72, элемент И 73 и инвертор 74.
Адаптивный цифровой фильтр работает следующим образом.
Рассмотрим случаи покадровой обработки радиолокационных сигналов.
Предположим, что в 1--м кадре обрабатывается последовательность N-мерных векторов Х ( ,
...,), плотность распределения Каждого из которых описывается соотношением
P(XpJ ((-
(1)
.).
где Q , - ковариационная матрица, характеризующая статистические связи между компонентами вектора X g в 1-м кадре. За L кадров (,L)обрабатывается LM векторов X. (,М), где М - число векторов в одном кадре) . При этом статистическую связь между сигналами из разных кадров можно описать L-мерным вектором пп. (Х,, . .. ,Х„,) , плотность распределения вероятностей которого можно представить в виде
P(Y,J (2ff)- det- Q,exp(- Y
hm
« ,
(2)
где Q,-кадровая ковариационная матрица, характеризующая статистические связи между сигналами из разных кадров.
В этом случае на множество векторов ,J можно определить некоторое подмножество зависимых векторов, элементы которого можно обозначить через вектор Z, г (х;. ..Х/).
Плотность распределения вероятностей вектора Z, определяется соотношением:.
P(Zj (2ir) det- Q,,exp (- Z.
1C
;; 2„).
(3)
где QIC совместная ковариационная матрица.
В качестве модели полезного сигнала используют квазидетерминированный сигнал с неизвестной амплитудой и частотой,.который в 1-м кадре может быть описан вектором S размерности N
S S,cos((n-1)T) , (4)
где Ьд и fa амплитуда н частота
сигнала.
При этом считают, что в за L кадров в рассматриваемом векторе полезный сигнал может либо отсутствовать, либо присутствовать только в одном кадре. Причем вероятность появления или отсутствия полезного сигнала в 1-м кадре описывается соотношением
Р f (L+1)- , 1 , (5)
где Р - вероятность отсутствия сигнала .
Таким образом, с вероятностью Р вектор полезного сигнала может принимать одно из возможных значений
1А942126
мощность на выходе устройства фильтрации равна
Pc.d) sXcVcV/G,,, Ve 51/5„.
Очевидно, что Рс(1) зависит от номера кадра и от неи шстной частоты. Для устранения указанной зависимости усредним Pci(l) по всем кадрам с вероятностью Р; и по всем неизвестным частотам fg, относительно которых предполагаем равномерное распределение в полосе дискретизации. Тогда Pcj(l) sjG,cG ,/(L-e1). Принимая во внимание приведенные соотношения получают для коэффициента улучшения следующее выражение
У
KV ,./G;,B,eG,c(L-t-1).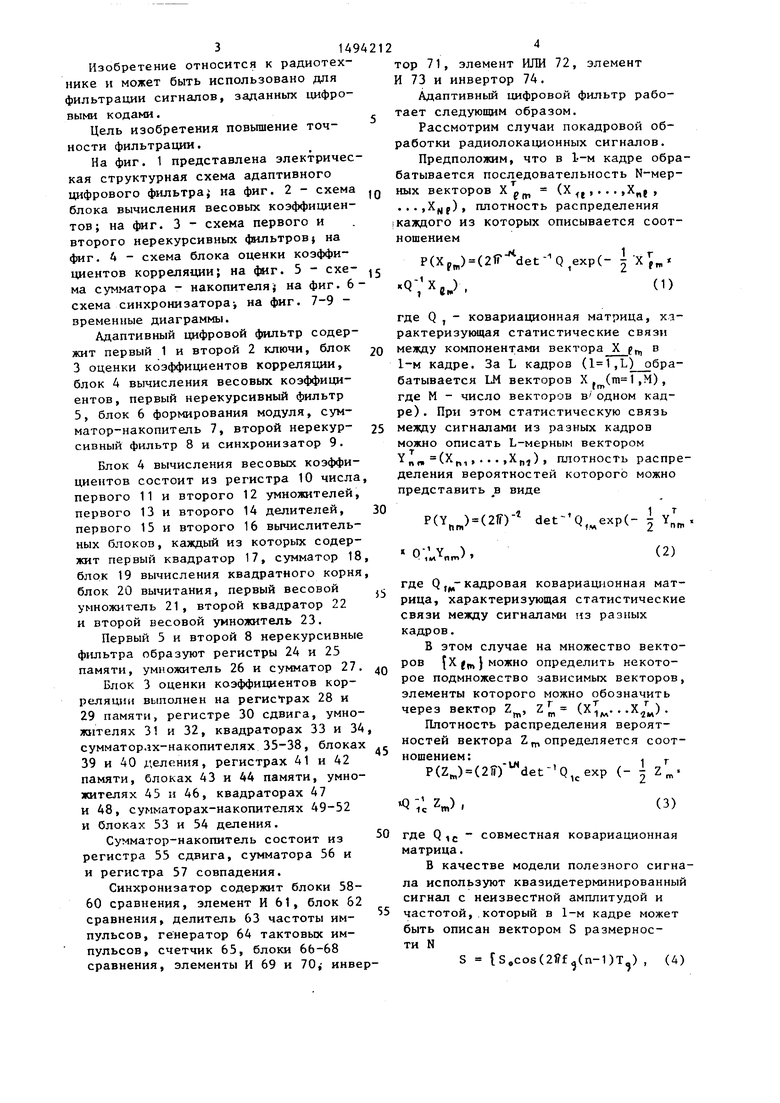

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный цифровой фильтр | 1986 |
|
SU1387173A1 |
| Адаптивный цифровой фильтр | 1986 |
|
SU1388896A1 |
| АДАПТИВНОЕ УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ | 1994 |
|
RU2097781C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ | 1982 |
|
SU1090136A1 |
| Адаптивный цифровой фильтр | 1987 |
|
SU1453593A2 |
| Адаптивный фильтр | 1981 |
|
SU1042163A1 |
| Устройство адаптивного приема дискретных сигналов | 1982 |
|
SU1113891A1 |
| Устройство для цифровой фильтрации | 1981 |
|
SU957416A1 |
| Цифровое устройство для подав-лЕНия пАССиВНыХ пОМЕХ | 1979 |
|
SU809018A1 |
| ЦИФРОВОЙ РАДИОПЕЛЕНГАТОР | 1997 |
|
RU2115135C1 |

Изобретение относится к радиотехнике. Цель изобретения - повышение точности фильтрации. Фильтр содержит ключи 1 и 2, блок оценки 3 коэф. корреляции, блок вычисления 4 весовых коэф., нерекурсивные фильтры 5 и 8, блок формирования 6 модуля, сумматор - накопитель 7 и синхронизатор 9. Входные отсчеты поступают через открытый ключ 1 на фильтр 5, куда также поступают и значения весовых коэф. В фильтре 5 производится обработка сигналов в текущем кадре и формируется сигнал в виде взвешенной суммы задержанных отсчетов. Далее с помощью блока формирования 6 и сумматора-накопителя 7 осуществляется децимация входной информации и полученный результат поступает на фильтр 8. Здесь происходит анализ входных сигналов с учетом статистических связей между кадрами и формируется выходной сигнал в виде взвешенной суммы сигналов из разных кадров. 1 з.п.ф-лы, 9 ил.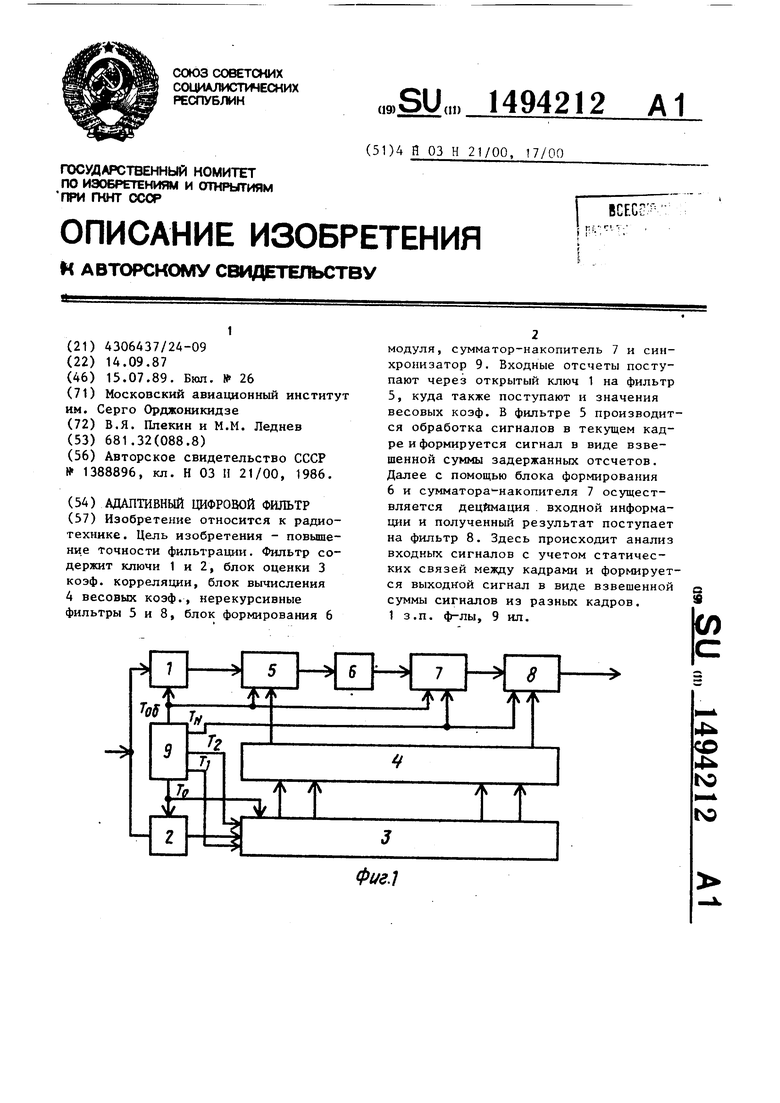
Т я
Sg (О, О, ..., S , о, ..., 0),
где О - N-мерный нулевой вектор.
Представленная модель совокупности кадровых сигналов достаточно I хорошо аппроксимирует обрабатываемый сигнал, например, при картографиро- вании поверхности или обработке в адаптивных антенных решетках.
Синтезируем цифровое устройство фильтрации кадровых сигналов, представляющих собой аддитивную смесь полезного сигнала и сигнала помехи: . В качестве критерия адаптации можно использовать критерий максимизации коэффициента улучшения отношения сигнал/помеха. Поскольку плотность Р(2 является нормальной то устройство анализа является линейным и описывается весовым вектором G. Для синтеза алгоритма вычисления G выражение для коэффициента улучшения записывается в виде
К 6, PC, /С, РС. ,
где 6 и мощность помехи на входе и выходе устройства фильтрации, PCI и PCI мощность полезного сигнала на входе и выходе устройства обработки.
Дисперсию помехи на выходе фильтра определяют в виде
65 ,zXG,ci
,c
где оператор математического ожидания, 3,° совместная корреляционная матрица.
Предположим, что сигнал присутствует, в 1-м цикле обзора, тогда его
0
5
Q
5
0
5
При этом вектор G максимизирующий последнее равенство, является собственным вектором матрицы В , соответствующим ее минимальному собственному числу, и определяется из решения следующей системы однород ных уравнений:
(.кГ) G ,е О, (6)
где f минимальное собственное число.
Практическая реализация алгоритма (6) существенно затрудняется тем, что приходится решать систему уравнений достаточно большого порядка LN. Для синтеза алгоритмов, не требующих операций с матрицей В для вычисления весового вектора докажем, что при статистической независимости распределения (1) и (2) вектор G,p можно представить в виде прямого произведения двух векторов, каждый из которых является собственным векто- .ром матрицы В, соответствующим ее минимальному собственному чис- лу, где В, Q,J б и В, Q/61
Элементы матриц В обозначим через tf,f, а элементы матриц В , и В , - чер b j j и b АР соответственно, hf 1, LN, qp ГТЫ, ij 1,L. Рассмотрим матрицу Q ,c j С учетом (3) ее можно представить в виде блочной матрицы размерности , каждый из блоков которой имеет размерность
Qic Q , j}-5UB;j). (7) Очевидно, что при i.j ,.
Для случая 1 jfc j с учетом статистической независимости распределения (1) и (2) можно показать, что
VP
bij ,
при при qfp
1494212
с
н л с
где - элементы матрицы B,j..
Из последних соотношений следует, что b;:B,. Проводя взаимное однозначное соответствие между Lp b ,j и , получают
Bic ,
(8)
где ® рямое произведения.
ПРИНИМАЯ во внимание соотношение (8), получают разложение для вектора G,.. Соотношение (8) справедливо и в случае, когда матрицы В,,., В д, и Bi являются диагональными. Пусть С д, и С соответствующие мат- рицы перехода, а С ю матрица перехода дпя В тс. Тогда из (8) следует, что
Ciiy BiMCiM®C B,C (C,B,eC,B,) к ;сС,®С,СУ„® с; В,В,„ С,С, откуда Cic С
Так как матрицы перехода образованы соответствующими собственными векторами, то
|М
®Gi,
(9)
где G и О, - собственные векторы матриц В , и В, соответствующие их минимальным собственным числам.
Таким образом, в соответствии с (9) для нахождения оптимального весового вектора G .необходимо вычислять векторы G д и G,, что приводит к операциям над матрицами меньших порядков L и N.
С использованием полученных ре- зультатоэ можно синтезировать алгоритм оптимальной цифровой фильтрации кадровых сигналов, например, для случая L 3 и N 3. Рассмотрим одно- родное уравнение дпя определения вектора G ,:
Г (1-Кмин)я,м- Ь Я4м- ЬгЯэм 0 - ib,q,+(), )
lbiq3M+b,qtM+(1-(MHH) Вычитая из первой строки третью,
получают (1-MMKH)qi,v+b.,-(1-Нмин)Чзм ОЕсли последнее тождество вьтол- няется, то получают условие (л которое затем можно подставить во второе уравнение системы и получить алгоритм дпя вычисления вектора GIA,. т.е. q,, qi -2Ь,/( ,
q
n
S
0
5
8 - минимальное соб0
45
, где ственное значение матрицы ,.
Дпя преодоления априорной неопределенности относительно неизвестных коэффициентов межкадровой корреляции применим адаптивный байесовский подход, в соответствии с кото- рьм
G, 1, -2Ь,/( )1J,(10)
где b - оценки коэффициентов межкадровой корреляции.
Аналогично для вектора G .
G, 1, -2Ь;/1-р1,„„ ). 1, (11)
где Ь - оценки коэффициентов корреляции от отсчета к отсчету.
С использованием соотношений (10) и (11) синтезируют цифровое устройство фильтрации, причем обработку совокупности векторов Zj, , М, с учетом доказанной теоремы, можно производить последовательно: сначала в одном кадре, а затем от кадра к кадру, для чего введен блок 8 кадровой обработки.
Синтезированный алгоритм реализуется следующим образом.
С выхода синхронизатора 9 на управляющий вход второго ключа 2 начинают поступать импульсы Т„ оценки (фиг. 7а), благодаря чему отсчеты входного сигнала через открытый ключ 2 (в качестве которого можно использовать регистр совпадения) в цифровой параллельной форме поступают в блок 3 оценки коэффициентов корреляции, который по поступившим данным вычисляет оценки Ь,, Ь, Ь, Ь7.
Дпя оценки коэффициентов Ъ, и Ь используется следующий алгоритм
M.-i
1 uVi,
ni 1
Ич
,2
(12)
где Ufn - отсчеты входного сигнала, М , - объем выборки оценивания.
Импульсами Т информация передвигается по регистру 30 сдвига, который осуществляет задержку соответственно на один и на два периода дискретизации Т д. Задержанные отсчеты перемножаются с текущими, а затем поступают в сумматоры-накопители 35-38, которые реализуют операцию суммирования в соотношениях (12).
91
Импульсами Т информация передвигается по регистру 55 сдвига, раз-, мерность которого выбирается равной М , а затем складывается в сумматоре 56. По истечении времени накопления с выхода синхронизатора 9 поступает импульс Т, (фиг. 7б). В результате этого накопленные значения сигналов в первом кадре поступают в блоки 39 и 40 деления, на выходах которых формируются оценки Ь, и Ь, которые импульсом Т i записываются в регистры 41 и 42 памяти и поступают в блок 4. Для оценивания коэффи- диентов межкадровой корреляции используется следующий алгоритм:
Ь(1 Y (иЧп) ,
I 1,2
.П«1
1+Ь
8,.2ь1
b
где и, и j - сигналы из трех смежных кадров (фиг. 8а).
При помощи импульсов Тд информа- ция записывается и передвигается по блокам 43 и 44 памяти, емкость которых выбирается равной М. Блоки 43 и 44 осуществляют задержку сигналов на один и на два кадра. Затем в третьем кадре результаты перемножения задержанных и текущих сигналов поступают в сумматоры-накопители 49-52. Результаты суммирования считываются из них при помощи импульсов Т (фиг. 7в). Полученные таким образом значения Ь , и Ъ импульсом Т-2 записываются в регистры 29 и 28 памяти и поступают в блок 4. Блок 4 вычисления весовых коэффициентов по поступившим оценкам вычисляет коэффициенты весовых векторов в соответствии с алгоритмами (10) и (11). Для этого в первом и втором блоках 15 и 16 вычисляются минимальные собл л I
ственные числа матриц и JL «АНН Для расчета iU, Ммци используются следующие соотношения:
fi: . b(b|i8fill. . „,
л. . , .. 2
2fi,
при этом elf, - :
Через Tg (где Т - время, необходимое для вычисления весовых коэффициентов q м и Ч,) в нерекурсивные фильтры 5 и 8 поступают значения
49А2
Q 15
20
25 ,Q л
40
55
12 О
весовых коэф(})ициентов, а с выхода синхронизатора 9 на управляющий вход первого ключа начинают поступать импульсы Tgj- обработки (фиг. 86), благодаря чему входные отсчеты проходят в нерекурсивные фильтры 5 и 8.
8первом нерекурсивном фильтре 5 производится обработка сигналов и текущем кадре, для чего в регистрах
24 и 25 осуществляется задержка на один и два периода дискретизации. Выходной сигнал первого нерекурсивного фильтра 5 формируется на выходе сумматора 27 в виде взвешенной суммы задержанных отсчетов.
Для снижения требований, предъявляемых к объему памяти при кадровой обработке, используется блок 6 фор- мир ования модуля и сумматор-накопитель 7, с помощью которых осуществляется децимация входной информации, что приводит к снижению темпа выдачи данных, сумматор-накопитель 7 производит накопление импульсов, после чего с выхода синхронизатора
9на стробирующий вход регистра 57 совпадения поступает импульс
(фиг. 8в) В результате этого информация поступает во второй нерекурсивный фильтр 8. Использование в качестве устройства деформации сумматора-накопителя 7 позволяет повысить отношение сигнал/помеха после обработки во втором нерекурсивном фильтре 8, где происходит анализ входных сигналов с учетом статисти-- ческих связей между кадрами. Его выходной сигнал формируется в виде взвешенной суммы сигналов из разных кадров и поступает на выход адаптивного цифрового фильтра.
Пример выполнения синхронизатора 9 представлен на фиг. 6, а управляющие сигналы, поясняющие его работу - на фиг. 9. Генератор 64 выдает последовательность импульсов дискретизации Т, из которой впоследствии формируются управляющие напряжения. Счетчик 65 начинает подсчет числа импульсов Т, поступивших на его вход. Выходной код счетчика поступает в блок 66 сравнения. Если выходной код счетчика 65 меньше цифрового кода М,, то на выходе блока 66 формируется единичный уровень (фиг. 9а), в результате чего через элемент И 69 и элемент ИЛИ 72 импульсы Т проходят на выход синхронизатора 9. Таким образом проис11
ходит формирование импульсов Т в первом кадре. В момент равенства кодов М и выходного кода счетчика 65 на выходе блока 67 формируется единичный уровень Т, поступающий на выход синхронизатора 9. Формирование импульсов Тр во втором и третьем кадрах происходит аналогичным образом с помощью формирования временного отбора для последовательности Тд, При этом опорным сигналом блока 67 является код MN, сигналам блока 68 - код MN+M , а сигналами блоков 58 и 59 - коды 2MN и 2MN + М, соответственно. Управляющие сигналы на выходах блоков 67 и 71 показаны на фиг. 96 и 9в, сигнал на выходе блока 58 - на фиг. 9г сплошной линией, а на выходе блока 74 - на фиг. 9г пунктирной линией.
1ч
Формула изобретения
i9А21
10
15
20
25
30
35
40
45
50
55
212
затора, второй сигнальный вход соединен с вторым выходом блока вычисления весовых коэффициентов, а выход является выходом адаптивйого цифрового фильтра, при этом, второй, третий и четвертый выходы блока оценки коэффициентов корреляции соединены соответственно с вторым, третьим и четвертым входами блока вычисления весовых коэффициентов, а четвертый и пятый выходы синхронизатора соединены с вторым и третьим тактовыми входами блока оценки т .оэффициентов корреляции.
.
Фиг.
es4
Тн
7V
Тн
Г-I
9ue.Q
i
:
Фи.З
| Адаптивный цифровой фильтр | 1986 |
|
SU1388896A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
