со
00
;о 00 ел
N
Изобретение относится к управлению флотационным процессом в пневматической машине колонного типа и может быть использовано на обогатительных фабриках цветной металлургии, угольной промышленности, промышленности минеральных удобрений, а также при флотационной водоочистке.
Целью изобретения является повышение точности управления процессом флотации в противоточной пневматической колонной машине с зонами минерализации и очистки за счет учета влияния структуры потоков.
На чертеже приведена расчетная кривая зависимости извлечения ценного компонента в концентрат от высоты зоны минерализации.
Способ заключается в том, что определяют распределение частиц исходного питания процесса по классам крупности, распределение частиц классов крупности по времени пребывания их в процессе, определяют среднюю крупность частиц, содержание тонких частиц, флотируемость частиц средней крупности, выход воды в пенный продукт и степень аэрации, изменяют высоту зоны минерализации обратно пропорционально флотируемости частиц средней крупности и прямо пропорционально распределению частиц классов крупности по времени пребывания их в процессе, изменяют высоту зоны очистки прямо пропорционально содержанию тонких частиц, выходу воды в пенный продукт и степени аэрации.
Определение распределения частиц по классам крупности позволяет найти кинетическую константу в промышленной фло- томашине по формуле
)
где РП(Г), Рл(г) -интенсивности захвата частиц крупностью г в промышленном и лабораторном аппаратах, соответственно;
Кп, Кл - константы скорости флотации в промышленной флотомашине и лабораторном аппарате, в котором проводится флотометриче- ский анализ, соответственно.
Подставив соотношение (1) в кинетическое уравнение первого порядка с распределенной константой скорости, можно получить следуюшее соотношение:
Havcр /ч
en(r|.t) 5 (l-exp())
х(Кл,т) dKл,
(2)
5
где(Кл,-г) -плотность распределения частиц или ценного компонента по крупности и флотоактивности, рассчитанная по данным лабо- раторного опыта в периодическом режиме.
Величина f (K-vT)dK-idr равна весовой доле частиц крупностью от г до r+dr и флото- активностью в лабораторном аппарате от Кл до Кл-|- dK- от всей массы питания флотации.
Экспериментальные исследования для расчета функции Рл{г), Рп(г), определяемых структурой потоков во флотомашине, показали удовлетворительную адекватность соот- 5 ношения
Р(Г)Ф(44-3,(3)
где R - средний размер пузырьков; UA, UR.-скорости седиментации частиц раз- Qмером г и подъема пузырьков диаметром R- относительно пульпы соответственно;
Ф- объемное газосодержание, доли ед. Определение распределения времени пребывания частиц в процессе (колонном аппарате) с высотой зоны минерализации (расстояние от точки ввода питания до аэратора) Н позволяет оценить выход и извлечение по формуле
л1
5 E,(t)8n(r; t)d.dt,(4)
о о
гдеЕг(1) -плотность распределения времени пребывания в процессе частиц размером г, определяемая струк- Cтурой потоков процесса.
Пренебрегая влиянием седиментации частиц, можно считать, что время пребывания частиц в процессе (колонной флотомашине) слабо зависит от их размера и равно E(t).
0 Высота рассматриваемого аппарата значительно больше его диаметра и размеров зон гидродинамической неоднородности вблизи точек подачи питания и воздуха в камеру, следовательно форма распределения - времени пребывания не зависит от высоты зон минерализации и очистки и определяется степенью аэрации.
Таким образом, при постоянном расходе воздуха распределение безразмерного времени пребывания не меняется:
0
Е() Idem.
Причем р. V
(5)
Р(1-ф)
(6)
55
где V- скорость потока пульпы; Q - объемный поток пульпы; F - величина сечения колонны.
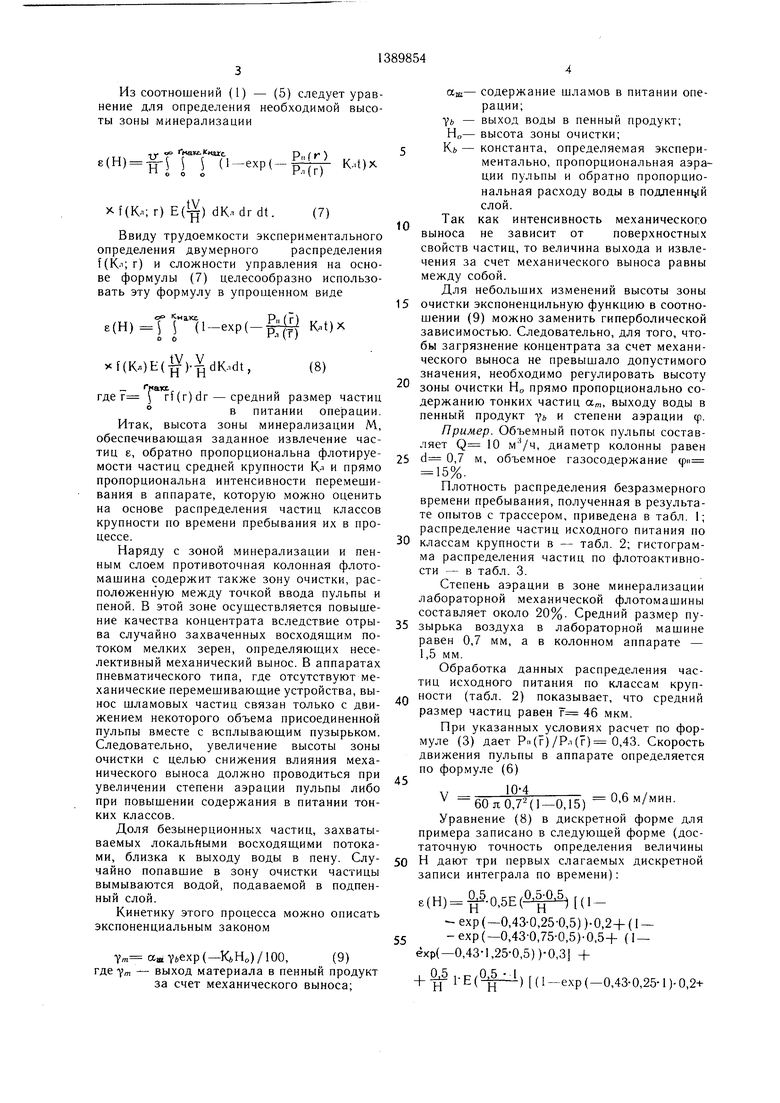
Из соотношений (1) - (5) следует уравнение для определения необходимой высоты зоны минерализации
1
I i ,
rVisK-KHart
;i-exp(K..t)x
x.f(K-; г) E(i) dK-drdt.(7)
Ввиду трудоемкости экспериментального определения двумерного распределения f(K-i;r) и сложности управления на основе формулы (7) целесообразно использовать эту формулу в упрощенном виде
ef 1$макс
ши
е(Н)$ {l-exp( КЛ)Х
О
xf(K)E(|),
(8)
Снате
где г ri(r)dr - средний размер частиц °в питании операции.
Итак, высота зоны минерализации М, обеспечивающая заданное извлечение частиц 6, обратно пропорциональна флотируе- мости частиц средней крупности K-i и прямо пропорциональна интенсивности перемещи- вания в аппарате, которую можно оценить на основе распределения частиц классов крупности по времени пребывания их в процессе.
Наряду с зоной минерализации и пенным слоем противоточная колонная флото- мащина содержит также зону очистки, расположенную между точкой ввода пульпы и пеной. В этой зоне осуществляется повышение качества концентрата вследствие отрыва случайно захваченных восходящим потоком мелких зерен, определяющих неселективный механический вынос. В аппаратах пневматического типа, где отсутствуют механические перемешивающие устройства, вынос шламовых частиц связан только с движением некоторого объема присоединенной пульпы вместе с всплывающим пузырьком. Следовательно, увеличение высоты зоны очистки с целью снижения влияния механического выноса должно проводиться при увеличении степени аэрации пульпы либо при повышении содержания в питании тонких классов.
Доля безынерционных частиц, захватываемых локальными восходящими потоками, близка к выходу воды в пену. Случайно попавщие в зону очистки частицы вымываются водой, подаваемой в подпен- ный слой.
Кинетику этого процесса можно описать экспоненциальным законом
Ym аш (-К,Но) /100,(9)
где Ym - выход материала в пенный продукт за счет механического выноса;
5
Так выноса
(Хш- содержание шламов в питании операции;
УЬ - выход воды в пенный продукт; Н„- высота зоны очистки; К - константа, определяемая экспериментально, пропорциональная аэрации пульпы и обратно пропорциональная расходу воды в подленн } й слой.
как интенсивность механического не зависит от поверхностных свойств частиц, то величина выхода и извлечения за счет механического выноса равны между собой.
Для небольших изменений высоты зоны очистки экспоненцильную функцию в соотношении (9) можно заменить гиперболической зависимостью. Следовательно, для того, чтобы загрязнение концентрата за счет механического выноса не превышало допустимого значения, необходимо регулировать высоту зоны очистки Но прямо пропорционально содержанию тонких частиц а,, выходу воды в пенный продукт 7 степени аэрации ф. Пример. Объемный поток пульпы составляет Q 10 м 7ч, диаметр колонны равен 5 d 0,7 м, объемное газосодержание фп 15%.
Плотность распределения безразмерного времени пребывания, полученная в результате опытов с трассером, приведена в табл. 1; распределение частиц исходного питания по классам крупности в - табл. 2; гистограмма распределения частиц по флотоактивно- сти - в табл. 3.
Степень аэрации в зоне минерализации лабораторной механической флотомашины составляет около 20%. Средний размер пу- 5 зырька воздуха в лабораторной машине равен 0,7 мм, а в колонном аппарате - 1,5 мм.
Обработка данных распределения частиц исходного питания по классам круп- Q ности (табл. 2) показывает, что средний размер частиц равен f 46 мкм.
При указанных условиях расчет по формуле (3) дает РП(Г)/РЛ (г) 0,43. Скорость движения пульпы в аппарате определяется по формуле (6)
0
10-4
60яО,7(1-0,15) 0 Уравнение (8) в дискретной форме для примера записано в следующей форме (достаточную точность определения величины 0 Н дают три первых слагаемых дискретной записи интеграла по времени):
с /HI-2 5-П SF A5 0i54 г /1
j и,ОЕ. jq 7 1И
55
- ехр(-0,43-0,25-0,5) )-0,2+ (1 - -ехр(-0,430,75-0,5)-0,5-f (1 -
ёхр(-0,43-1,25-0,5) )-0,3 +
(1--ехр(-0,43-0,25-1)-0,2+
+ 1-Е(
Н
+ (1 -ехр(-0,40,75l)).0,5+(l - -exp(-0,43l,25-l))-0, 15E(). х(1-ехр(-0,43-0,25-1,5))-0,2+
+ (1-ехр(-0,43-0,75-1,5))-0,5+((-0,43-1,25-1,5) )-0,3.
Для определения высоты зоны минерализации последнее уравнение решено при помощи метода половинного деления. Значения Е(-тт) при этом определяются интерполяцией экспериментальных данных табл. 1.
Из приведенной на чертеже расчетной за- виси мости е/Н следует, что для достижения извлечения необходима высота зоны минерализации Н 4,5 м, что совпадает с результатами численного решения.
Высота зоны очистки определяется из условия (9) При имевшихся расходах воз- духа через диспергатор и воды в подпен- ный слой экспериментально определено, что К() 2,6 . Следовательно,
V
20-Шехр(-2.6Но)
100
7 0,
откуда HO 0,5 м.
Таблица 1
35
0,5 11,5 2 30
0,6 0,8 0,4 0,1 О
Табл-ица 2 -20 -44-1-20 -71+44 -100-1-71 +100
20 3230144
„„.
100
80
60 0
20
Таблица 3
0-0,5 0,5-11-1,5
0,750,150,10
Предлагаемый способ позволяет повысить извлечение ценного компонента в концентрат в колонной пневматической машине.
0
5
35
0
Формула изобретения
Способ управления процессом флотации, основанный на изменении времени флотации в зависимости от распределения частиц и ценного компонента по флотируе- иости, отличающийся тем, что, с целью повышения точности управления процессом флотации в противоточной пневматической колонной машине с зонами минерализации и очистки за счет учета влияния структуры потоков, определяют распределение частиц исходного питания по классам крупности, среднюю крупность частиц, содержание тонких частиц, распределение частиц классов крупности по времени пребывания их в процессе, флотируемость частиц средней крупности, выход воды в пенный продукт, степень аэрации, при этом изменяют высоту зоны минерализации обратно пропорционально флотируемости частиц средней крупности и прямо пропорционально распределению частиц классов крупности по времени пребывания их в процессе, а высоту зоны очистки изменяют прямо пропорционально содержанию тонких частиц, выходу воды в пенный продукт и степени аэрации.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом флотации | 1986 |
|
SU1395372A1 |
| Аэролифтно-пневматическая флотационнаяМАшиНА | 1979 |
|
SU822904A1 |
| СПОСОБ ФЛОТАЦИОННОГО РАЗДЕЛЕНИЯ МНОГОКОМПОНЕНТНОЙ СМЕСИ | 1999 |
|
RU2164825C1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ИЗБРАННЫХ МИНЕРАЛОВ ИЗ РУДНЫХ ПУЛЬП НАПОРНОЙ ФЛОТАЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2507007C1 |
| СПОСОБ ФЛОТАЦИИ ЧАСТИЦ | 1992 |
|
RU2102153C1 |
| ФЛОТАЦИОННАЯ МАШИНА | 2010 |
|
RU2457037C2 |
| ПНЕВМАТИЧЕСКАЯ ФЛОТАЦИОННАЯ МАШИНА | 1992 |
|
RU2038864C1 |
| Флотационная машина | 1990 |
|
SU1738366A1 |
| СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ ФЛОТАЦИИ | 2015 |
|
RU2596841C2 |
| Аэролифтно-пневматическая флотационная машина | 1980 |
|
SU971484A1 |
Изобретение относится к обогащению полезных ископаемых. Цель изобретения - повышение точности управления процессом флотации в противоточной пневматической колонной машине с зонами минерализации и очистки за счет учета влияния структуры потоков. Для этого определяют распределение частиц исходного питания процесса по классам крупности, среднюю крупность частиц, содержание тонких частиц, распределение классов крупности по времени пребывания их в процессе, флотируемость частиц средней крупности, выход воды в пеп- ный продукт и степень аэрации. При этом изменяют высоту зоны минерализации обратно пропорционально флотируемости частиц средней крупности и прямо пропорционально распределению частиц классов крупности по времени пребывания их в процессе. Высоту зоны очистки изменяют прямо пропорционально содержанию тонких частиц, выходу воды в пенный продукт и степени аэрации. Определение распределения частиц по классам крупности позволяет найти критическую константу в промышленной флотомашине. 3 табл. 1 ил. (О (Л
ВНИИПИЗаказ 1601/8Тираж 527Подписное
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
7 Н,Ц
| Способ регулирования процесса флотации в пневматической колонной машине и устройство для его осуществления | 1984 |
|
SU1214213A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ управления процессом флотации | 1984 |
|
SU1233940A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ управления процессом флотации | 1981 |
|
SU1005918A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
