(21)4123104/29-03
(22)24,09.86
(46) 23.04.88. Бюл. № 15
(71)Челябинский завод дорожных машин им. Колющенко
(72)И.Н.Блисеенко, А.Б.Сырков, Г.П.Перчаков, Э.И.Толстопятенко, Н.М.Рукавишников и В.А.Созыкин
(53)621.878.2(088.8)
(56)Скловский А.А. Автоматизация дорожных машин.- Рига: Авотс, 1980.
Заявка ФРГ № 2035779, кл. Е 02.F 3/84, 1976.
(54)ГВДРОПРИВОД УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ПЛАНИРОВОЧНОЙ МАШИНЫ
(57)Изобретение относится к дорожной технике. Цель - повьш1ение произв-ти машины. Гидропривод включает насос
1, гидроцилиндр (РЦ) 4 двустороннего действия, первьщ 5 и второй 23 распределительные органы с подводящими 11 и 28 и отводящими 13 и 29 магистралями соответственно, связанные с полостями ГЦ 4, и дроссели 33 и 33 . Выполнен рабочий орган 23 в виде двухкаскадного злектрогидравлическо- го распределителя, рабочие отводы 31 и 32 которого соединены с полостью опускания 22 ГЦ 4. Б нейтральном положении подвод 28 сообщается с отводом 29 через дроссель 33, а рабочие вьшоды 31 и 32 второго рабочего органа 23 заперты. В рабочей позиции подвод 28 сообщается с рабочим отводом 31 через дроссель 33, а подвод 29 - с рабочим отводом 32 и со сливом. Жидкость от насоса 1 поступает в полость подъема 21 ГЦ 4, обеспечивая подъем рабочего органа. Из противоположной поршневой полости 22 вытесняемая жидкость через отвод 13, через подвод и далее через дроссель 33 поступает в отвод 29 и на слив, что приводит к достижению рабочим органом необходимого положения. 1 ил.:
о 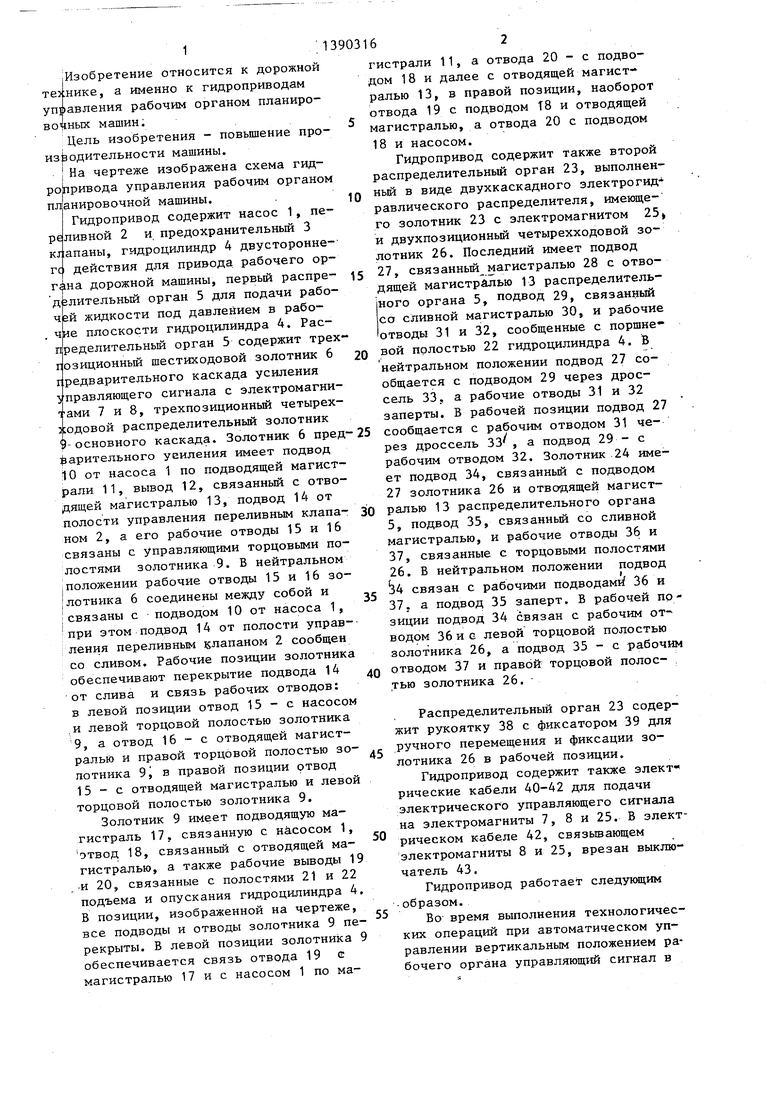
| название | год | авторы | номер документа |
|---|---|---|---|
| Объединенный гидропривод опрокидывающего механизма и усилителя рулевого управления саморазгружающего транспортного средства | 1990 |
|
SU1729877A1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320902C2 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320903C1 |
| ГИДРОСИСТЕМА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2001 |
|
RU2209540C2 |
| ГИДРОПРИВОД УПРАВЛЕНИЯ СТРЕЛОЙ СТРОИТЕЛЬНОЙ МАШИНЫ | 1997 |
|
RU2150553C1 |
| Гидропривод буровой установки | 1987 |
|
SU1523651A1 |
| Объемный гидропривод опрокидывающего механизма и усилителя рулевого управления автомобиля-самосвала | 1988 |
|
SU1512828A1 |
| Гидравлическая система комбайна | 1988 |
|
SU1561879A1 |
| ГИДРОСИСТЕМА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2004 |
|
RU2274996C2 |
| Гидравлическое устройство для увеличения сцепного веса трактора | 1975 |
|
SU554829A1 |

гг .4
со
О)
1 ; 1
Изобретение относится к дорожной технике, а именно к гидроприводам управления рабочим органом планировочных машин;
Цель изобретения - повышение производительности машины.
I На чертеже изображена схема гид- роЬривода управления рабочим органом
пл анировочнои машины.
Гидропривод содержит насос 1, переливной 2 и предохранительный 3 К1:апаны, гидроцилиндр 4 двустороннеrci действия для привода рабочего ор- г4на дорожной машины, первый распре- дглительный орган 5 для подачи рабочей жидкости под давлением в рабочие плоскости гидроцилиндра 4. Рас- пределительньй орган 5 содержит трех гозиционный шестиходовой золотник 6 гредварительного каскада усиления 3 правляющего сигнала с электромагнитами 7 и 8, трехпозиционный четырех- з:одовой распределительный золотник 9-основного каскада. Золотник 6 пред арительного усиления имеет подвод 10 от насоса 1 по подводящей магистрали 11, вывод 12, связанный с отво- р,яш,ей магистралью 13, подвод 14 от полости управления переливным клапаном 2, а его рабочие отводы 15 и 16 связаны с управляющими торцовыми полостями золотника 9. В нейтральном I положении рабочие отводы 15 и 16 зо- |лотника 6 соединены между собой и I связаны с подводом 10 от насоса 1, при этом подвод 14 от полости управ- ; ления переливным 1 лапаном 2 сообщен со сливом. Рабочие позиции золотника обеспечивают перекрытие подвода 14 от слива и связь рабочих отводов: в левой позиции отвод 15 - с насосом ,и левой торцовой полос-тью золотника 9, а отвод 16 - с отводящей магистралью и правой торцовой полостью зо- потника 9i в правой позиции отвод 15 - с отводящей магистралью и левой торцовой полостью золотника 9.
Золотник 9 имеет подводящую магистраль 17, связанную с насосом 1, отвод 18, связанньш с отводящей магистралью, а также рабочие выводы 19 , .и 20, связанные с полостями 21 и 22 подъема и опускания гидроцилиндра 4. В позиции, изображенной на чертеже, все подводы и отводы золотника 9 перекрыты. В левой позиции золотника 9 обеспечивается связь отвода 19 с магистралью 17 и с насосом 1 по ма
0
0
5 0 5 -с
5
0
0
5
162
гистрали 11, а отвода 20 - с подводом 18 и далее с отводящей магистралью 13, в правой позиции, наоборот отвода 19 с подводом 18 и отводящей магистралью, а отвода 20 с подводом 18 и насосом.
Гидропривод содержит также второй распределительный орган 23, выполнен- ньй в виде двухкаскадного злектрогид- равлического распределителя, имеюще- го золотник 23 с электромагнитом 25 и двухпозиционньй четырехходовой золотник 26. Последний имеет подвод 27, связанньй магистралью 28 с отводящей магистралью 13 распределительного органа 5, подвод 29, связанный со сливной магистралью 30, и рабочие отводы 31 и 32, сообщенные с поршневой полостью 22 гидроцилиндра 4. В нейтральном положении подвод 27 сообщается с подводом 29 через дроссель 33,, а рабочие отводы 31 и 32 заперты. В рабочей позиции подвод 27 сообщается с рабочим отводом 31 через дроссель 33, а подвод 29 - с рабочим отводом 32. Золотник 24 имеет подвод 34, связанньй с подводом 27 золотника 26 и отводящей магистралью 13 распределительного органа 5, подвод 35, связанньй со сливной магистралью, и рабочие отводы 36 и 37, связанные с торцовыми полостями 26. В нейтральном положении подвод 34 связан с рабочими подводам 36 и 37. а подвод 35 заперт. В рабочей позиции подвод 34 связан с рабочим отводом 36 и G левой торцовой полостью золотника 26, а подвод 35 - с рабочим отводом 37 и правой торцовой полостью золотника 26.
Распределительный орган 23 содержит рукоятку 38 с фиксатором 39 для ручного перемещения и фиксации золотника 26 в рабочей позиции.
Гидропривод содержит также элект рические кабели 40-42 для подачи электрического управляющего сигнала на электромагниты 7, 8 и 25. В электрическом кабеле 42, связьтающем электромагниты 8 и 25, врезан выключатель 43.
Гидропривод работает следукмцим образом.
Во время выполнения технологических операций при автоматическом управлении вертикальным положением рабочего органа управляющий сигнал в
виде электрического напряжения формируется датчиком положения рабочего органа (не показан) и затем после сравнения с сигналом задатчика (не показаны) поступает в зависимости от знака по кабелю 40 к электромагниту
7или по кабелю 42 к электромагнитам
8и 25. При ручном управлении управляющий сигнал задается непосредствен но задатчиком .
В установившемся режиме, когда по ложение рабочего органа соответствует заданному, управляющий сигнал равен нулю. Электромагниты 7, 8 и 25 обесточены и золотник 6 и 9 распреде лительного органа 5, а также золотники 24 и 26 распределительного ор- гана 23 находятся в нейтральных позициях. При этом рабочие выводы 19, 20 и 31, 32 распределительных органов заперты, а рабочие отводы 14 и 15 золотника 6 и отводы 36 и 37 золот- ника 24 связаны с торцовыми полостями золотников 9 и 26 соответственно Через подвод 10 торцовые полости золотника 9 связаны также с насосом, а через подвод 27 торцовые полости золотника 26 - с отводом 18 золотника 9. В нейтральной позиции : полость управления переливного клапана 2 сообщена через подвод 14 и золотник 6. со сливом, что обеспечивает открытие переливного клапана и безнапорный перепуск жидкости от насоса 1 в бак (разгрузку насоса).
При рассогласовании фактического положения рабочего органа от заданного, например при отклонении рабочего органа в сторону его заглубления, восстановление необходимого положения осуществляется путем корректирования положения в сторону подъема до достижения рабочим органом заданного положения. Управляющий сигнал в этом случае поступает по кабелю 40 к электромагниту 7 и вызывает перемещение его якоря и соответственно золотника 6 предварительного каска- да в левую позицию. В результате этого происходит перекрытие подвода 14 от слива и закрытие переливного клапана 2, т.е. нагрузка насоса. Жидкость под давлением от насоса через подвод 10, связанньй в левой пози- ции с подводом 15, поступает в левую торцовую полость распределительного золотника 9, обеспечив его перемещение также в левую позицию. Пра
5
0
0
5
0
5
0,
5
вьй торец золотника 9 сообщается с отводящей магистралью 13 за счет связи в левой позиции подводов 12 и 16 золотника 6. Жидкость от насоса через магистраль 17, связанную с рабочим-отводом 19, поступает в полость 21 гидроцилиндра 4, обеспечивая подъем рабочего органа. Из противоположной поршневой полости 22 жидкость вытесняется поршнем через связанные рабочий вьгоод 22 и подвод 18 в отводящую магистраль 13 и далее через подвод 27 распределительного органа 23, дроссель 33 и отводящую линию 29 в бак. Достижение рабочим органом необходимого положения характеризуется исчезновением управляющего сигнала и обесточиванием электромагнита 7, что приводит к возврату золотника 6 под действием пружины в нейтральное положение и связи полости управления переливного клапана 2 со сливом (разгрузка насоса), а также за счет связей торцовых полостей золотника 9 с отводящей магистралью к возврату золотника 9 под действием пружины также в нейтральное положение.
При корректировании положения par бочего органа в сторону опускания (если рабочий орган находится вьше заданного положения) управляющий сиг- нал поступает по кабелю 41 к электромагнитам 8 и 25 (выключатель замкнут) и вызьшает перемещение золотника 6 в правую позицию, а золотника 24 в его рабочую позицию. В результате этого происходят также перекрытие подвода 14 от слива и нагрузка насоса. Л(идкость от насоса через подвод 10, связанный в правой позиции с выводом 16, поступает в правую торцовую полость золотника 9, обеспечивая его перемещение в правую позицию. Противоположная полость золотника 9 при этом через подвод 10, связанный в правой позиции золотника 6 с выводом 12, сообщается с отводящей магистралью. В правой позиции золотника 9 жидкость рт насоса через связанные подвод ,18 и вывод 20 поступает в полость 22 гидроцилиндра 4. В то же время перемещение золотника 24, влечет за собой немедленное переключение золотника 26, так как для его переключения необходима подача жидкости под давлением в левую торцовую полость золотника 24. За счет связей
513
подводящей магистрали 28 распределительного органа 23 с отводом 18 распределительного органа 5, а также ч€|рез дроссель 33 со сливом в момент п4ступления управляющего сигнала на электромагниты В и 25 в подводе 27 отсутствует какое-либо давление. Это зйачит, что золотник 26, несмотря на переключение золотника 24, остаетси в нейтральной позиции, поэтому пирвоначальный момент опускания рабочего органа осуществляется только 31 счет распределительного органа 5. Пэдача жидкости под давлением в по- лЬсть 22 гидроцилиндра вызывает пе- р|емещение поршня и вытеснение жидкос- Т|И из полости 21 через связанные отвод 19 и подвод 18 в отводящую магистраль к подводу 27 распределительиого органа 23 и далее через дроссель 33 и отвод 29 в бак. Появление расхода рабочей жидкости через дроссель 33 вызывает возникновение на кем перепада давлений и за счет свя- лей подводов 34 и 35 с рабочими от- иодами 36 и 37 в рабочей позиции золотника 24 обеспечивает переключение золотника 26 в рабочую позицию, в которой поршневая полость 22 гидро- Цилиндра 4 через отводы 31 и 32 сооб- Ьается с отводом 29 и баком. В резуль ате этого давление в полости 22 равно давлению слива. Опускание рабо- :чего органа с этого момента происхо- 1дит только за счет вытеснения жид- Кости из полости 21 гидроцилиндра массой рабочего органа. Время между :началом опускания : и переключения зо;лотника 26 в рабочую позицию определяется проходным сечением дросселя 33, размерами золотника 26 и усилием его пружины.
Таким образом, процесс опускания рабочего органа характеризуется первоначальным импульсом принудительного опускания, а затем продолжением опускания уже под действием только массы рабочего органа. Достижение рабочим органом необходимого положения ведет к исчезновению управляющего сигнала, обеспечению электромагнитов и к возврату всех золотников в нейтральное положение. Описанный режим опускания характерен для грунта с низкой твердостью.
На грунтах средней твердости, где возможны участки твердости, опускани протекает следующим образом. Как и
5
0
5
0
5
0
5
66
ранее первоначальное опускание обеспечивается .кратковременным импульсом принудительного опускания , затем опускание продолжается только под действием раб.очего органа. Если во второй фазе опускания твердость грунта повышенная и массы рабочего органа недостаточно для заглубления, то опускание прекращается. Это значит, что прекращается вытеснение рабочей жидкости из полости 21, а следовательно, и расход через дроссель 33, что вызывает исчезновение перепада давлений на дросселе 33 и возврат золотника 26 под действием пружины в нейтральное положение. Это ведет к перекрытию выводов 31 и 32 от слива, повьшенйю давления в полости 22 и принудительному заглублению рабочего органа. Перемещение рабочего -органа вызывает вытеснение рабочей жидкости из полости 21 гидроцилиндра и возникновение перепада давлений на дросселе 33, что опять ведет к переключению золотника 26 в рабочую позицию и опусканию только под действием рабочего органа, т.е. при обработке твердого грунта процесс опускания осуществляется короткими импульсами давления в поршневой полости гидроцилиндра до тех пор, пока не станет возможным опускание под действием рабочего органа. При размыкании выключателя 43 реализуется управление рабочим органом в режиме чистого двустороннего управления. Процесс подъема протекает в этом случае ана-5 логично описанному, а процесс опускания соответствует первоначальной фазе описанного опускания (золотники 24 и 26 распределительного органа 23 находятся в нейтральных позициях).
Для реализации плавающего режима, например, при заглаживании планируемой поверхности тьшьной стороной ствола бульдозера во время движения задним ходом с помощью рукоятки 38 золотник 26 распределительного органа 23 переводится в рабочую позицию и подается электрический сигнал от ручного задатчика на электромагнит 8, т.е. включается позиция Опускание принудительное золотника 9.
Жидкость от насоса, как и в случае принудительного опускания, поступает в поршневую полость 22 гидроцилиндра 4, однако за счет связи полос713903
ти 22 через отводы 31 и 32 в рабочей позиции золотника 26 со сливной магистралью 30 давление в полости 22 равно давлению слива, а давление насоса обусловлено сопротивлением трубопроводов,, которое выбирается, ис- зодя из требования удержания золот- ника 9 в правой позиции. За счет связи обеих полостей гидроцилиндра Q 4 со сливом обеспечивается свободное перемещение поршня, позволяющее свободно скользить рабочему органу по обрабатьтаемой поверхности.
Формула изобретения
Гидропривод управления рабочим органом планировочной машины, включающий насос, гидроцилиндр двустороннего действия, первый и второй распределительные органы с подводящими и отводящими магистралями, связан
Q
5
0
168
ные с полостями гидроцилиндра, о т - личающийся тем, что, с целью повьшения производительности машины, второй распределительный ор-. Ган выполнен в виде двухкаскадного электрогидравлического распределителя, подводящая и отводящая магистрали которого сообщены соответственно с отводящей магистралью первого распределительного органа и со сливом, а рабочие отводы - с поршневой полостью гидроцилиндра, при этом в одной из позиций электрогидравлического распределителя его рабочие отводы разобщены от подводящей и отводящей магистралей, а последние посредством дросселя сообщены между собой, а в другой позиции один рабочий отвод сообщен с отводящей магистралью первого распределительного органа через дополнительный дроссель, а другой рабочий отвод со сливом.
