(21} 4112353/24-07
(22) 27.08.86
(46) 23.04.88. Бюл. № 15
(71)Волжское объединение по производству легковых автомобилей
им. 50-летия СССР
(72)Н.Н.Горунов, И.Ф.Жмиевский и В.И.Судаков
(53)621.318.3-5(088.8)
(56X Нежданов В.Т., Нежданов И.В. Аппараты низкого напряжения, ЦИНТИЭЛЕКТРОПРОМ, 1961, т.11, с. 111-116.
Каталог ST51 фирмы Сименс, ФР, 1981, с.7.
(54)ВЫХОДНОЙ КАНАЛ УСТРОЙСТВА УП- РАВЖНИЯ
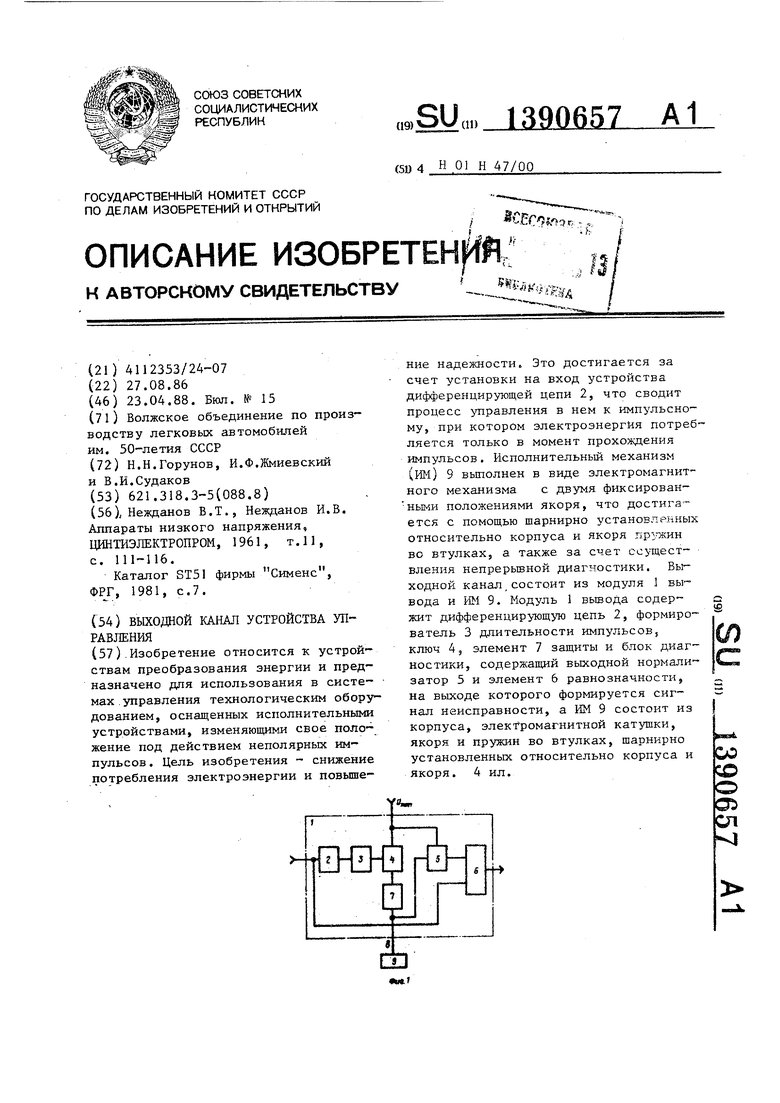
(57).Изобретение относится к устройствам преобразования энергии и предназначено для использования в систе- мах . управления технологическим оборудованием, оснащенных исполнительными устройствами, изменяющими свое положение под действием неполярных импульсов . Цель изобретения - снижение потребления электроэнергии и повышение надежности. Это достигается за счет установки на вход устройства дифференцирующей цепи 2, что сводит процесс управления в нем к импульсному, при котором электроэнергия потребляется только в момент прохождения импульсов. Исполнительный механизм (им) 9 выполнен в виде электромагнитного механизма с двумя фиксирован- ными положениями якоря, что достигается с помощью шарнирно установленных относительно корпуса и якоря пp гж;ин во втулках, а также за счет сс тцест- вления непрерывной диагностики. Выходной канал,состоит из модуля 1 вывода и ИМ 9. Модуль 1 вьшоДа содержит дифференцирующую цепь 2, формирователь 3 длительности импульсов, ключ 4, элемент 7 защиты и блок диагностики, содержащий выходной нормализатор 5 и элемент 6 равнозначности, на выходе которого формируется сигнал неисправности, а ИМ 9 состоит из корпуса, электромагнитной катушки, якоря и пружин во втулках, шарнирно установленных относительно корпуса и якоря. 4 ил.
S

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1978 |
|
SU782107A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ АВТОМОБИЛЬНОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1988 |
|
RU2076049C1 |
| Устройство контроля работоспособности электромагнитного исполнительного механизма постоянного тока | 1987 |
|
SU1529270A1 |
| Установка для регулирования положения сооружений | 1991 |
|
SU1795000A1 |
| Устройство для управления вентильным преобразователем | 1980 |
|
SU1146781A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ ОТ ЭВМ | 1992 |
|
RU2010292C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОМАГНИТНЫХ МЕХАНИЗМОВ, ПРЕИМУЩЕСТВЕННО ЗАПОРНЫХ КЛАПАНОВ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2260222C2 |
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 1995 |
|
RU2084011C1 |
| Импульсный синхронизатор | 1981 |
|
SU1023525A1 |
| Импульсная следящая система | 1986 |
|
SU1746359A1 |

IW
Изобретение относится к устройствам преобразования энергии и предназначено для использования в системах управления технологическим оборудова- нием, оснащенных исполнительными устройствами, изменяющ:ими свое положение под действием неполярных импульсов.
Цель изобретения - снижение потребления электроэнергии и повьшеггше надежности.
На фиг,J представлена структурная схема выходного канала устройства управления; на фиг.2 - исполнительное устройство, разрез; на фиг.З - npsi- мер вьшолнения элемента равнозначности, диаграмма состояния; на фиг.4 - временные диаграммы выходных сигналов элементов выходного канала устройства управления.
Выходной канал устройства управления содержит модуль 1 вьшода, состоящий из дифференцирующей цепи 2, формирователя 3 длительности импульсов, ключа 4 блока диагностики, со-- держащего входной нормализатор 5 и элемент 6 равнозначности, и элемен™ та 7 защиты. К выхо|Ду модуля 1 вывода через линию 8 связи подключен исполнительный механизм 9, состоящий из корпуса 10, 11, якоря 2, пружин 13 в ограничивающих втулках 14 и шарниров 15.
Дифференцирующая цепь 2 установлена на входе модуля 1 вывода так, что вход дифференцирующей цепи 2 является и входом модуля 1 вывода, а выход ее подключен к входу формирователя 3 длительности импульсов, выход которого соединен с входом ключа 4, Вход дифференцирующей цепи 2 соединен с первым входом элемента 6 равнозначности, к второму входу которого подключен выход нормализатора 5, а вход последнего соединен с выходом модуля 1 вьшода и через элемент 7 защиты с выходом Ю1юча 4,
Ключ 4 служит для коммутации напряжения питания (и„„) на исполнительный механизм 9 по команде сигналов управления на входе модуля 1 вы- вода.
Входной нормализатор 5 служит для согласования и„„-,. с входом элемента 6 равнозначности,
Выходной канап устройства управления работает следующим образом.
При поступлении сигнала управления на вход модуля J вывода дифферен
5 0
5 0
5 0
г
0
цирующая цепь 2 формирует импульс, запускающий формирователь 3 длительности импульсов, которьш в свою очередь вырабатывает импульс с длительностью, необходимой для перевода исполнительного механизма 9 из одного фиксированного положения в другое. Независимо от того, какой длительности сигнал поступает на вход модуля J вьщода, формирователь 3 длительности импульсов выдает на выходе импульсы постоянной длительности,достаточной для перевода самого инерци г онного исполнительного механизма в новое состояние. Единственное условие, которое должно при этом соблюдаться - пауза между двумя входными сигналами (сигналами, подаваемыми на вход модуля) должна превышать длительность импульса на выходе формирователя 3 (фиг.4).
Далее импульс с формирователя 3 поступает на ключ 4 и с его выхода передается через элемент 7 защиты по линии 8 связи на катущку 1J исполнительного механизма 9 (фиг.2). В катушке 11 возникает электромагнитное поле, под действием которого якорьJ2 начинает перемещаться (втягиваться в катушку и) и проходит неустойчивое нейтральное положение, примерно 2/3 рабочего хода. При этом пружи-м ны 13 сжимаются во втулках J4, которые исключают их изгиб, и поворачиваются относительно шарниров 15. Дальнейшее перемещение якоря .12 осуществляется за счет повернувшихся и разжимающихся пружин 13 до тех пор, пока он не установится в новое положение у противоположного исходному края катушки П. Пружина 13 фиксирует якорь 12 в рабочем положении.
При. прекращении подачи сигнала управления на вход модуля 1 вывода дифференцирующая цепь 2 формирует им- « пульс обратной полярности, которьй, в свою очередь, создает в формировав теле 3 длительности импульсов и далее в выходном ключе 4 новый импульс, возвращающий якорь 12 исполнительного механизма 9 в исходное положение. I
Работа исполнительного механизма 9 при воздействии на него импульсами одной полярности ничем не отличается от работы при воздействии импульсами разной полярности, так как у него нет никаких элементов, реагирующих на направление тока, например посто
янных магнитов, поэтому якорь )2 исполнительного механизма 9 перебрасывается в новое положение при каждом новом импульсе тока, как и все подоб- ные электромагнитные устройства типа реле, электромагнитов и т.п.
Предлагаемый выходной канал устройства выполнен так, что процесс управления в нем сводится к импульсно- му, при котором электроэнергия по требляется устройством только в момент прохождения импульсов, а в промежутках времени между включающими и отключающими импульсами не потре.бля- ется.
Чтобы повысить надежность работы выходного канала и достоверность информации о срабатывании электромагнитного устройства, параллельно ключу А подключен блок диагностики, ко- торьй содержит входной нормализатор 5 и элемент 6 равнозначности,на выходе которого формируется сигнал о наличии неисправности. Проверка работоспособности элементов выходного канала устройства управления осуществляется как при отсутствии управляющего сигнала на входе модуля 1 вывода, так и при наличии его (фиг,4).
При отсутствии управляющего сигнала на входе модуля 1 вывода проверяются наличие напряжения питания (Up ) и исправность линии 8 связи и катушки JJ исполнительного механизма 9, В этом случае ток протекает по цепи источник питания 4,,,, - входной нормализатор 5 - последовательно соединенная цепь элементов 8 и 9 - земля - источник питания npoTe канне тока на входе нормализатора 5 обусловливает появление сигнала логической единицы на его выходе. Сиг- нал логической единицы от нормализатора 5 и сигнал логического нудя с входа модуля 1 подаются на входы эЛе- мента 6 равнозначности и формируют на его выходе сигнал отсутствия неис правности О.
Если имеется неисправность источ-
ника питания или хотя бы одного из элементов 8 или 1, цепь прохождения тока от источника питания через нормализатор 5 оказывается разорванной, и на второй вход элемента 6 равнозначности с выхода нормализатора 5 поступает сигнал - логический О. Этот сигнал и сигнал логического О на первом входе элемента 6 равнознач
о 5 О
г
0
ности, поступивший с входа модуля 1 вывода, формируют на выходе элемента 6 сигнал о неисправности - логическую J.
При наличии управляющего сигнала на входе модуля 1 вьгоода проверяется исправность дифференцирующей цепи 2, формирователя 3 длительности импульсов и ключа 4 с элементом 7 защиты. В этом случае ключ 4 шунтирует вход нормализатора 5, на выходе которого появляется сигнал, соответствующий логическому О, поступающий на второй вход элемента 6 равнозначности. Данный сигнал совместно с сигналом логической 1, поступающим на первый вход элемента 6 с входа модуля 1 вывода, формирует на выходе элемента 6 сигнал отсутств -1 неисправное- ти - логический О.
Если хотя бы один из элементов 2- 4 или 7 неисправен, ключ 4 не шунтирует вход нормализатора 5 и на его выходе появляется сигнал логической 1, которьш совместно с сигналом логической J с входа модуля 1 вывода формирует на выходе элемента 6 равнозначности сигнал о неисправности - логическую J.
Таким образом, диагностика выходного канала устройства управления осуществляет ся непрерьшно и позволяет локализовать место отыскания неисправности, причем сигнал выдается только в момент возникновения неисправности какого-либо элемента.
Импульсньш режим работы выходного канала устройства управления и применение в нем электромагнитного устройства с двумя фиксированными, без потребления электроэнергии, положенияг ми якоря позволяет уменьшить потребление электроэнергии, так как она потребляется только в момент прохождения импульсов, упростить КОНСТ-.
рукцию, так как для одного исполнительного устройства требуется один модуль вывода (в известном - два моду- - ля вывода на один исполнительный механизм), о.беспечить непрерывную диагностику работоспособности и локализацию отыскания неисправностей устройства, а также осуществить управление несколькими исполнительными устройствами по одной линии связи, используя, например, шаговый электромагнитный механизм или диодкое распределение сигналов, что увеличивает
долговечность и повьппает надежность выходного канала устройства управления.
Формула изобретения
Выходной канал устройства управления, срдержащий исполнительньй механизм с фиксированными рабочими положениями и модуль вывода, включающий ключевой элемент и блок диагностики, отличающийся тем, что, с целью снижения потребления электроэнергии и повышения надежности, в указанньй модуль вывода введены соединенные последовательно дифференцирующая цепь и формирователь длительности импульсов, в блок диаг уУ УУ лу
Фа г. 2
5
ностики введены входной нормализатор и элемент равнозначности, выход формирователя длительности импульсов соединен с входом ключа, вход дифференцирующей цепи соединен с первым входом элемента равнозначности и точка .их соединения подключены к входу модуля вьшода, второй вход элемента Jравнозначности подключен к выходу нормализатора, вход которого соединен с выходом модуля вывода и с исполнительным механизмом, в качестве ко торого использован электромагнитный механизм, причем для фиксации его рабочих положений использованы пружины, установленные шарнирно относительно корпус-а и якоря электромагнитного ме ханизма.
.л
ч
Фиг.
