. Изобретение относится к машиностроению и авиационной технике и может быть использовано для управления станками с числовым программным управлением, роботами-манипуляторами, пилотируемыми и беспилотными летательными аппаратами, локаторами и т.д.
Целью изобретения является повышение точности, быстродействия, системы, а также КПД и надежности системы.
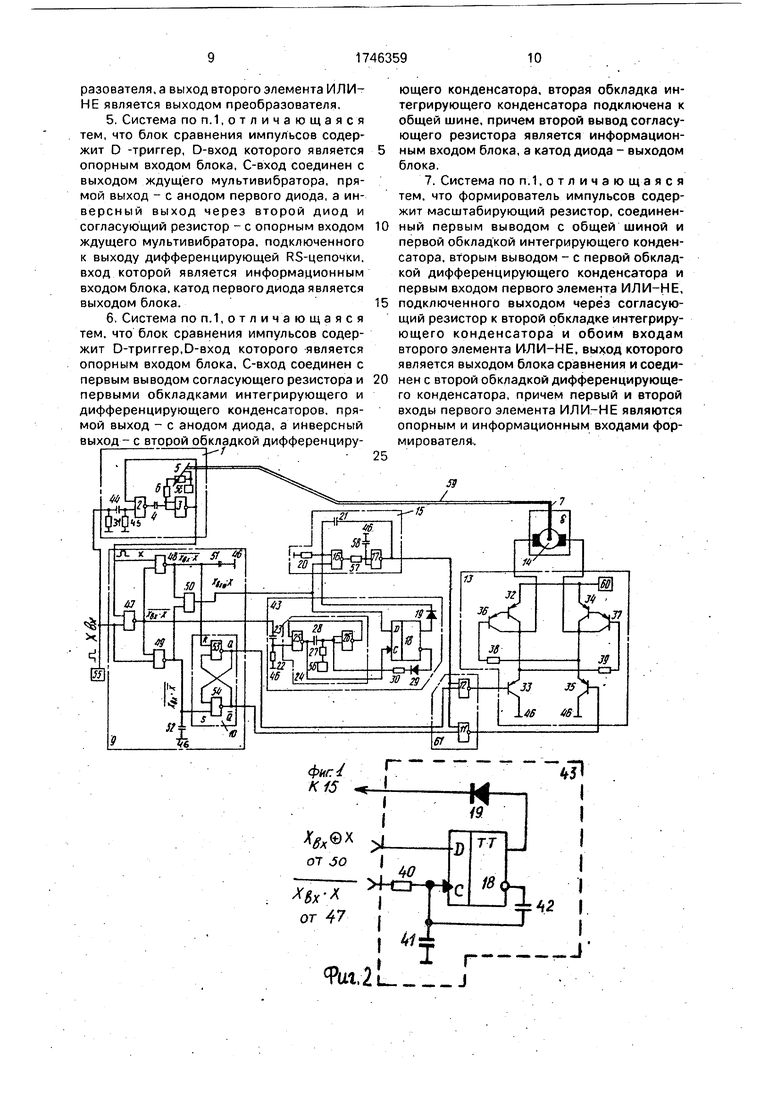
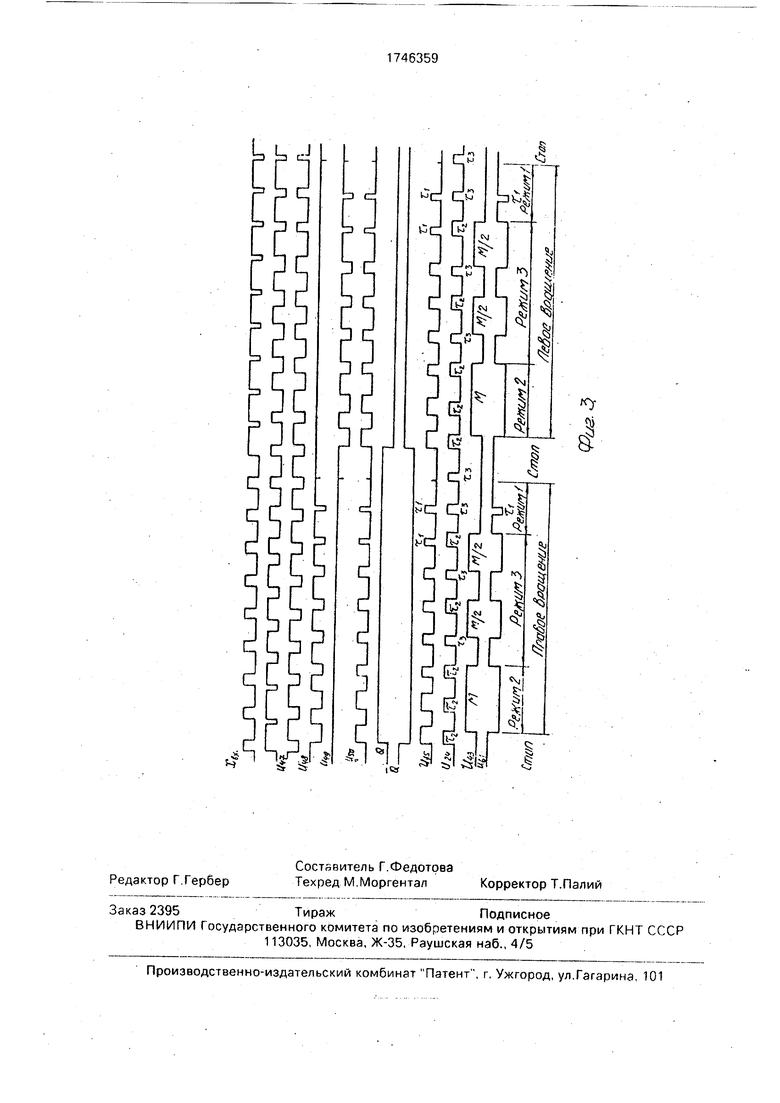
На фиг.1 представлена структурная схема системы с первым вариантом выполнения блока импульсов: на фиг.2 - принципиальная электрическая схема второго варианта выполнения блока сравнения импульсов; на фиг.З - временные диаграммы, поясняющие работу системы.На чертежах приняты следующие обозначения:
преобразователь 1 положение - код. элементы ИЛИ-НЕ 2 и 3, дифференцирующий конденсатор 4. потенциометр 5, масштабирующий резистор 6, выходной вал 7 электродвигателя 8, измеритель 9 рассогласования, RS-триггер 10, элементы И-НЕ 11 и 12, усилитель 13 мощности, якорь 14 электродвигателя 8, формирователь 15 импульсов, элементы ИЛИ-НЕ 16 и 17, D- триггер 18, диод 19, масштабирующий резистор 20, дифференцирующий конденсатор 21, масштабирующий резистор 22, дифференцирующий конденсатор 23, ждущий мультивибратор 24, элемент ИЛИ-НЕ 25 и 26, масштабирующий резистор 27, дифференцирующий конденсатор 28, диод 29, согласующий резистор 30, масштабирующий резистор 31, транзисторы 32-37, масштэШ J
Jb о
со ел
рующие резисторы 38-40, интегрирующий и дифференцирующие конденсаторы 41 и 420 блок 43 сравнения импульсов, дифференцирующий конденсатор 44, масштабирующий резистор 45, общая шина 46, элементы И-НЕ 47-50, конденсаторы 51 и 52, элементы И-НЕ 53 и 54, задатчики 55, источники 56 напряжения питания, согласующий резистор 57, механическая передача 59, интегрирующий конденсатор 58, источ- ник 60 питания, ключ 61, 1-й выходной сигнал i-ro элемента или блока системы ХВх - выходной сигнал задатчика 55, т.е. сигнал задания, X - выходной сигнал преобразователя 1 положение - код, т.е. регулируемая координата. Q и Q - выходные сигналы RS - триггера 10
Устройство работает следующим образом
Входной сигнал Х0х задатчика 55, полез- пая информация в котором содержится в ширине импульса (фиг 3), запускает преобразователь 1 положение - код, вырабатывающий сигнал X. длительность импульсов которого изменяется и зависит от положе- ния движка потенциометра 5 (фиг.З). Сигналы ХХв и X поступают на входы измерителя 9 рассогласования, на выходах элементов которого ф ормируютс я сигналы Ц7-ХХв«Х U48-XBxOUJ49 XBx XMU50 Xex-X(.3} Сигналы ХвхХ и U48 и LM9 ХВхХ поступают соответственно на R и S-входы RS-триггера 10, который определяет знак сигнала рассогласования, те. определяет направление вращения якоря 14 электро- двигателя 8 С выходов Q и Q RS-триггера 10 сигналы знака (т е направления вращения) поступают на управляющие входы ключа 61 (Фиг.З).
Сигнал Uso ХвхХ с выхода элемента И -НЕ 50 измерителя 9 рассогласования поступает на информационный вход формирователя 15 импульсов, где импульс Uso даже бесконечно малой длительности расширяется до импульса Uis длительностью ri (фиг.З) необходимой и достаточной для максимально возможной скорости вращения вала 7 электродвигателя 8. но с соблюдением условий устойчивости системы (без перерегулирования), что определяется па- оаметрами RS«-цепочки, состоящей из масштабирующего резистора 20 и дифференцирующего конденсатора 21. номиналы которых выбираются исходя из ди- намическиххарактеристик
исполнительного механизма, функционально состоящего из усилителя 13 мощности, исполнительною электродвигателя 8 и механической передачи 59. Расширенные импульсы поступают на информационный вход ключа 61,0 на одном из выходов которого появляются импульсные сигналы X (фиг.З).„
Сигнал U47 с выхода элемента И-НЕ 47 измерителя рассогласования 9 через дифференцирующую цепочку, состоящую из масштабирующего резистора 22 и дифференцирующего конденсатора 23, поступает на информационный вход ждущего мультивибратора 24, который по положи- тельному перепаду сигнала Ц ХВх X (фиг.З) вырабатывает импульс U24 длительностью Г2 (фиг.З). Этот сигнал поступает на С-вход триггера 18, на D-вход которого поступает сигнал Uso выхода элемента И-НЕ 50 измерителя 9 рассогласования
Если длительность импульса U24 меньше длительности импульса Uso ХВх® X, то на прямом выходе D-триггера 18 устанавливается сигнал Шз равный 1 (фиг.З), который через диод 19 поступает на опорный вход формирователя 15 импульсов, на его выходе устанавливается сигнал 1, который поступает на информационный вход ключа. На выходе ключа 61 формируется сигнал Uei (фиг.З). Транзисторы усилителя 13 мощности открываются и на якорь 14 электродвигателя 8 поступает постоянное напряжение Его вал 7 развивает полный крутящий момент.
По мере изменения положения вала 7 исполнительного электродвигателя 8 изменяется положение движка потенциометра 5, что приводит к изменению длительности импульса сигнала X на выходе преобразователя 1 положение - код. Это приводит к уменьшению длительности сигнала U Хв/ 9 X на выходе элемента И-НЕ 50. Когда она станет меньше длительности Г2 D-триггер 18 опрокидывается. На его инверсном выходе по является напряжение с уровнем 1, которое через диод 29 и резистор 30 поступает на вход элемента И-НЕ 26 ждущего мультивибратора 24 и корректирует длительность т импульсов U24 в сторону их уменьшения до величины гз . При этом, если длительность гз импульса U меньше длительности импульса сигнала Uso XBx©X на выходе элемента И-НЕ 50, ю на прямом выходе D-триггера 18 и на выходе блока 43 сравнения импульсов появляется напряжение с уровнями 1 и О (фиг 3) и через каждый период сигнала задания Хвх (режим 3) электродвигатель 8 развивается 50% мощности.
Если длительность гз импул,,-а ш4 больше длительности импульса сигнала Uso
т Хвх Ф X, то на прямом выходе D-триггера устанавливается сигнал D.
Таким образом, при больших сигналах рассогласования, т.е. если длительность импульса U24 меньше длительности импуль- са Uso Хвх©Х. то на электродвигатель 8 поступает постоянное напряжение и он развивает полную мощность (режим 2, фиг.З). По мере уменьшения величины рассогласования уменьшается длительность импульса Uso Хвх ©X. В том случае, когда длительность импульса U24 больше длительности импульса Uso Хвх © X, а длительность гз импульса U24 меньше длительности импульса Uso ХвхФХ, то на электродвигатель поступает импульсный сигнал скважности два, т.е. он развивается 50% своей мощности (режим 3, фиг.З). Когда длительность импульса Uso Хвх Ф X становится меньше длительности гз импульса U24 (режим 1, фиг.З), D-триггер 18 выключается. На его прямом выходе устанавливается сигнал О, а в каждый период сигнала задания ХВх на электродвигатель 8 поступает импульс длительностью Т для точной установки вала 7 электродвигателя 8 на требуемый уюл отклонения или точного передвижения рейки исполнительного механизма на требуемую длину.
Так как система будет работать до тех пор. пока разность сигналов ХПх и X на выходе элемента И-НЕ 50 измерителя 9 рассогласования не станет равной нулю(точнее бесконечно малой величине с учетом сухого трения), то вал 7 исполнительного электро- двигателя 8 всегда будет устанавливаться в требуемое положение с нулевой ошибкой Д , точнее с ошибкой Д , равной бесконечно малой величине, зависящей от параметров
о Г зад/2 1к/пер Ксотр% Kg
где г зад - время задержки одного элемента И-НЕ измерителя 9 рассогласования (наносекунды);
Кпер - отношение максимальной длительности импульса Хвх к его минимальной длительности. КПер может быть выбрано любым от до 100 и более. Чем больше К пер и меньше г зад. тем меньше составляющая погрешности, г зад/2 1/ К пе; и практически реально достижение ее знач.эсл- бесконечно малой величины третьего - четвертого порядка
Kemp - коэффициент, учитывающий ра- боту чувствительного элемента при наличии сухого трения (кулоновского). Выполнение чувствительного элемента конденсаторного типа (или еще более точного) уменьшает
Kemp до малой, величины, а выражение Гзад/2, 1/Кпер Kemp дает в результате уменьшение порядка бесконечно малой величины до второго - третьего порядка.
Kg - коэффициент, учитывающий динамические характеристики исполнительного механизма (сервомеханизма).
Из всего сказанного вытекает следующее.
При любых динамических характеристиках исполнительного механизма значение его мертвой зоны в данной системе можно устанавливать бесконечно малой величины второго - третьего порядка, но при худших динамических характеристиках исполнительного механизма. Вращение вала электродвигателя в точном режиме слежения несколько уменьшается, что определяется параметрами резистора 20 и конденсатора 21. При необходимости введения зоны нечувствительности в формирователе 15 импульсов устанавливается RC-цепочка, постоянная времени TRC которой и является определяющей дяя ширины мертвой зоны.
В зависимости от динамических характеристик исполнительного механизма устанавливают зоны действия режима 2 )100% мощности) и режима 3 (50% мощ- ости) путем подбора номиналов резистора 27 и конденсатора 28 (режим 3) и резисторов 27 и 30 (режим 2).
В данном техническом решении динамические характеристики всей системы оп- ределяются только динамическими характеристиками исполнительного механизма, а во всех остальных традиционных известных аналогах зависят еще и от динамических характеристик других элементов системы управления, что является очень большим недостатком аналогов.
При осуществлении регулирования в данной системе на скоростях, равных скорости регулирования аналогов, в ней ширина мертвой зоны будет бесконечно малой величиной второго - третьего порядка, а при осуществлении регулирования с минимальными мертвыми зонами, известными из аналогов в данной системе скорости регулирования увеличиваются на один-два порядка, по причине отсутствия в ней инерционных звеньев: интеграторы, дифференциаторы и т.д.
Кроме того выполнениеусилитепя мощность по предлохенной схеме позволяет существенно повысить КПД и надежность системы так. как при изменении тока электродвигателя 8, например при изменении нагрузки, прикладываемой к выходному валу 7 электродвигателя 8, изменяется ток базы транзистора 33 (или 35) и он входит в более глубокое насыщение при увеличении тока нагрузки, что приводит к более глубокому насыщению транзисторов 37 и 34 (или 36 и 32). При малых токах нагрузки базовые токи транзисторов незначительны, т.е. осуществляется адаптация усилителя мощности при изменениях- момента, прикладываемого к выходному валу исполнительного механизма.
В известных же технических решениях при фиксированных токах базы транзисторов усилителя мощности, которые весьма значительны, при увеличении тока нагрузки транзисторы выходят из глубокого насыщения На переходах эмиттер - коллектор этих транзисторов возрастает падение напряжения, что приводит к увеличению рассеиваемой на них мощности и к уменьшению мощности, подводимой к якорю 14 электродвигателя 8.
Формула изобретения
1. Импульсная следящая система, со-, держащая ключ, формирователь импульсов и последовательно соединенные усилитель мощности, электродвигатель, механиче- .скую передачу и преобразователь положение - код, выходом соединенный с первым входом измерителя рассогласования, вторым входом подключенного к выходу задат- чика, отличающаяся тем. что, с целью повышения точности и быстродействия системы, в ней дополнительно установлен блок сравнения импульсов, соединенный информационным входом с первым модульным выходом измерителя рассогласования, опорным входом - с вторым модульным выходом измерителя рассогласования и информационным входом Формирователя импульсов, а выходом - с опорным входом Формирователя импульсов, соединенного выходом с информационным входом ключа, подключенного первым и вторым выходами у первому и второму входам усилителя мощности, а первым и вторым управляющими входами к первому и второму знаковым выходам измерителя рассогласования, вторым модульным выходом соединенного с информационным входом формирователя импульсов выход задатчика соединен с входом синхронизации преобразователя положение - код
2 Система по п.1.отличающаяся тем: что измеритель рассогласования содержит первый элемент И-НЕ. первый и вто- рии входы которого являются первым и вторым входами измерителя и соединены соответственно с первыми входами второго и третьего элементов И-НЕ. а выходом - с
вторыми входами второго и третьего элементов И-НЕ, выход второго элемента И-НЕ соединен с первым входом четвертого элемента И-НЕ и R-входом RS-триггера и
через первый конденсатор - с общей шиной, выход третьего элемента И-НЕ соединен с вторым входом четвертого элемента И-НЕ, S-входом RS-триггера и через второй конденсатор - с общей шиной, причем выходы
0 первого и четвертого элементов И-НЕ являются первым и вторым модульными выходами измерителя, а первый и второй выходы триггера - первым и вторым знаковыми выходами измерителя.
53. Система по п.1, о т л и ч а ю щ а я с я
тем, что, с целью повышения КПД и надежности системы, усилитель мощности содержит шесть транзисторов одного типа проводимости, два масштабирующих рези0 стора и источник напряжения питания, соединенный выходом с эмиттерами первого и второго транзисторов, подключенных базами к эмиттерам соответственно гоетьего и четвертого транзисторов, коллектор перво5 го.транзистора соединен с коллектором третьего транзистора с эмиттером пятого транзистора и через первый масштабирующий резистор - с базой четвертого транзистора, коллектор второго транзистора
0 соединен с коллектором четвертого транзистора, эмиттером шестого транзистора и через второй масштабирующий резистор - с базой третьего транзистора, базы пятого и шестого транзисторов являются первым и
5 вторым входами усилителя, а их коллекторы соединены с общей шиной, коллекторы первого и второго транзисторов являются выходами усилителя.
4. Система по п.1,отличающаяся
0 тем, что преобразователь положение - код содержит первый масштабирующий резистор, соединенный первым выводом с общей шиной и первым выводом второго масштабирующего резистора, а вторым вы5 водом через первый дифференцирующий конденсатор - с вторым выводом второго масштабирующего резистора и первым входом первого элемента ИЛ И-НЕ. подключенного вторым входом к выходу второго
0 элемента ИЛИ-НЕ, а выходом через второй дифференцирующий конденсатор - к обоим входам второго элемента ИЛИ-НЕ и первому выводу третьего масштабирующего резистора. Соединенного вторым выводом с
5 первым выводом потенциометра, подключенного вторым выводом к выходу источника напряжения питания и подвижному движку потенциометра, причем второй вывод первого масштабирующего резистора является входом синхронизации преобразоразователя, а выход второго элемента ИЛИ- НЕ является выходом преобразователя.
5Система поп.1,отлича ющаяся тем, что блок сравнения импульсов содержит D -триггер, D-вход которого является опорным входом блока, С-вход соединен с выходом ждущего мультивибратора, прямой выход - с анодом первого диода, а ин- версный выход через второй диод и согласующий резистор - с опорным входом ждущего мультивибратора, подключенного к выходу дифференцирующей RS-цепочки, вход которой является информационным входом блока, катод первого диода является выходом блока.
6Система по п. 1,отличающаяся тем, что блок сравнения импульсов содержит D-триггер,D-вход которого является опорным входом блока, С-вход соединен с первым выводом согласующего резистора и первыми обкладками интегрирующего и дифференцирующего конденсаторов, прямой выход - с анодом диода, а инверсный
выход - с второй обкладкой дифференциру- -/
0
5
0
5
ющего конденсатора, вторая обкладка интегрирующего конденсатора подключена к общей шине, причем второй вывод согласующего резистора является информационным входом блока, а катод диода - выходом блока.
7. Система по п. 1,отличающаяся тем. что формирователь импульсов содержит масштабирующий резистор, соединенный первым выводом с общей шиной и первой обкладкой интегрирующего конденсатора, вторым выводом - с первой обкладкой дифференцирующего конденсатора и первым входом первого элемента ИЛИ-НЕ, подключенного выходом через согласующий резистор к второй обкладке интегрирующего конденсатора и обоим входам второго элемента 14ЛИ-НЕ, выход которого является выходом блока сравнения и соединен с второй обкладкой дифференцирующего конденсатора, причем первый и второй входы первого элемента ИЛИ-НЕ являются опорным и информационным входами формирователя.
Ј
ку
ч
Ј
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования температуры | 1982 |
|
SU1092473A1 |
| Регулятор | 1983 |
|
SU1193634A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Устройство для регулирования частоты вращения двигателя внутреннего сгорания | 1988 |
|
SU1506160A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ИЗМЕНЕНИЯ МОЩНОСТИ НАГРУЗКИ И ТЕМПЕРАТУРЫ ТОКОВЕДУЩИХ ЭЛЕМЕНТОВ СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ | 1991 |
|
RU2036513C1 |
| Многоканальный регулятор | 1988 |
|
SU1564586A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Следящая система | 1986 |
|
SU1427327A1 |
Изобретение относится к машиностроению и авиационной технике и может быть использовано для управления станками с числовым программным управлением, роботами-манипуляторами, пилотируемыми и беспилотными летательными аппаратами, локаторами и т.д. Целью изобретения являГ ется повышение точности, быстродействия, КПД и надежности системы. Поставленная цель достигается за счет того, что в зависимости от величины рассогласования меняется величина управляющего воздействия на исполнительный механизм. При больших сигналах рассогласования на исполнительный механизм действует постоянный сигнал, при мал ых-единичные импульсы, а при промежуточных значениях сигнала рассогласования - импульсный сигнал скважности два. Кроме того, особенностью системы является то, что в ней сигнал задания и регулируемая координата предварительно подвергаются широтно-импульсной модуляции и в дальнейшем все последующие действия осуществляются только над импульсными сигналами. 6 з.п. ф-лы, 3 ил. С/ С
| 0 |
|
SU300874A1 | |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Силовой следящий привод | 1984 |
|
SU1228070A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Устройство глубинной электроразведки | 1986 |
|
SU1366980A1 |
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
