Изобретение относится к строительству и предназначено Для подъема и опускания, а также горизонтального перемещения сооружений.
Известна установка для выравнивания сооружений, содержащая подъемные уст- ройстваа ввиде плоских гидродомкратов, которые размещаются в специальных проемах между опорной и поднимаемой частями здания и с помощью магистралей высокого давления и гидрокранов позици- онногр типа подключены через краны-де- мпферы к маслонасосной станции и связаны с системой дистанционного управления и контроля за процессом выравнивания, включающей в себя пульт управления, датчики линейных перемещений для измерения смещения поднимаемой части здания относительно опорной, датчики давления,
. контрольные манометры, соединительные ; линии 1..;...-..:; ....-.. :.,.,.........-
Однако в этой установе согласование (синхронизация) работы домкратов, необходимое для исключения повреждений сооружения в процессе его выравнивания за счет несогласованной работы домкратов, осуществляется весьма несовершенным методом - методом равного давления в .гидравлических параллельно включенных домкратах Этот метод предполагает использование домкратов с определенными соотношениями грузоподъемностей и (или) равнодействующих грузовых площадей от веса вышележащих конструкций, приходящегося на домкраты (при использовании одинаковых домкратов должно соблюдаться условиеравенства указанных равнодействующих). :
Х|
О О О
Метод равного давления не позволяет беспечить достаточно высокую точность аботы домкратов.
Кроме того, недостатками известной ус- нарвки являются: .
- использование позиционного регулиования в каналах, для которого характерны начительные; погрешности, удары при пееключений гидрбкранов, склонность сисемы регулирования к автоколебаниям;
: - непригОдйбсТь для программного управления перемещениями;,
-отсутствие автоматической аварийной ащиты;; ;v ;:; ,:л;,-;::.;;: ; ;; -; ; , ,
--управление процессом выравнивания: безу чета состояния вырйвнйваемого сооруения и его основания;;..,/ .
- низкая степень универсальности при-; менения (трудности использования установки для выравнивания крупных и сложных объектов, требующих применения больших количеств домкратов при обеспечении согласованной (си.нхронной) их pabV ты с высокой точностью, неприменимость для горизонтальных перемещений сооружений). . l:: ; - --;,. ;.. : ..
Целью; настоящего изобретения является )йе надежности раб.отыусТайЬвКИ. ; .-- V; ; : -;:;-; : / : : .,. .
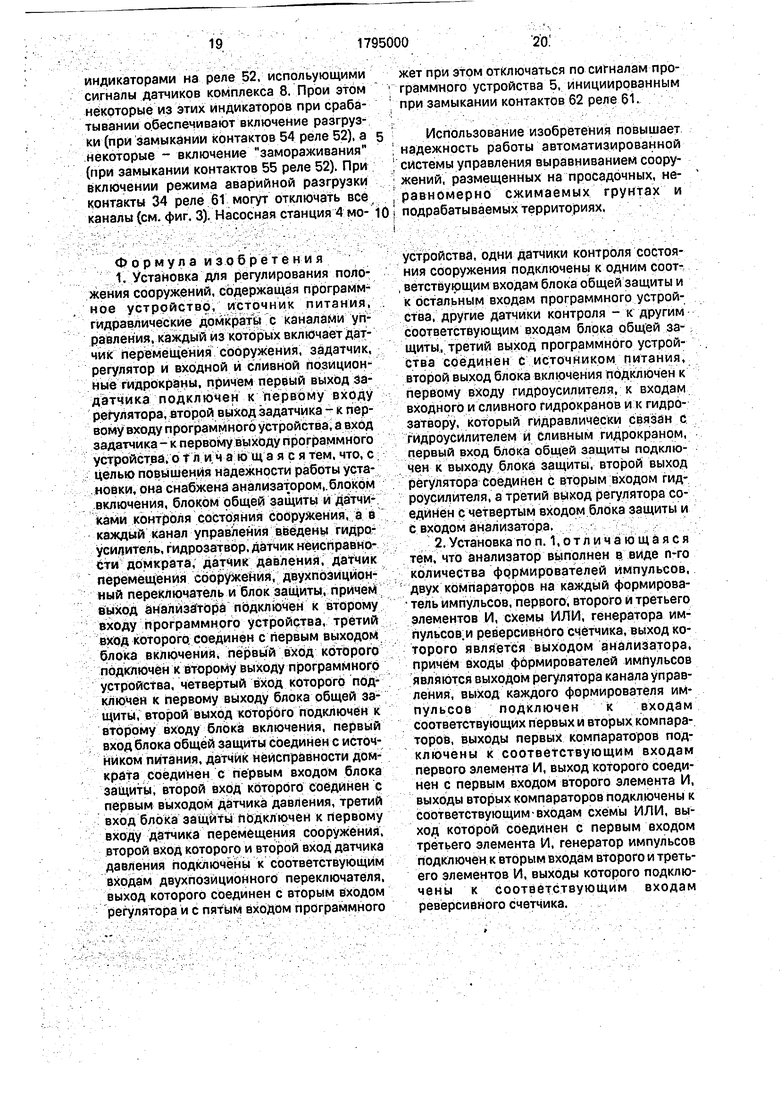
Эта цель достигается тем, что установка дл я ре.гул ирЬ ва;нй П оДожёни51.сдЬр уМ ен ий, содержащая программное устройство, источник питания и гидравлические .-домкраты с каналами управления, каждый из которых включает датчик перемещения, сооружения, задатчик7 регулятор: и входной и сливной позиционные гидрокраны, причем первый выход задатчика подключён к первому входу -регулятора,- второй выход задатчика под- клю Зен к первому входу программного устройства, а вход задаТчика подключён к первому выходу программного устройства, снабжена анализатором, блоком включе- ния, блоком общей защиты и датчиками контроля состояния сооружения, а в каждый канал управления введены гйдроусидитель, гидрозатвор, датчик неисправности домкрата, датчик давления, датчик перемещения сооружения, двухпозйционный переключатель и блок защиты, причем выход анализа- Тора подключен к втором входу программного устройства, третий вход которого соединен с первым выходом блока включения, первый вход которого подключен к второму выходу программного устройства, четвертый вход которого подключен к первому выходу блока общей защиты, вто- рой выход которого подключен к второму входу блока включения, первый вход блока общей защиты соединен с источником питания, датчик неисправности домкрата соединен с первым входом блока защиты, второй вход которого соединен с первым выходом датчика давления, третий вход блока защиты подключен к первому входу датчика перемещения сооружения, второй вход которого и второй вход датчика давления подключены к соответствующим входам двухпозиционного переключателя, выход
0 которого соединен с вторым входом регулятора и С пятым входом программного устройства, первый выход регулятора подключен к шестому входу программного устройства, одни датчики контроля состоя5 ния сооружения подключены к одним соответствующим входам блока общей защиты и к рстальным входам программного устрой- -Ства, другие- датчики контроля - к другим
соответствующим входам блока общей за0 щиты,, третий выход программного устройства Соединен с Источником .питания, второй выход блока включения подключен к .- первому /входу гйдроусйлитёлй, к входам входного и сливного гидрбкранов и к гидро5 затвору, который гидравлически связан с гиДроусйлитёлем и; сливным гид р.о кран ом, первый вход блока общей защиты подключен к выходу блока защиты, второй выход ;; регулятора соединен с вторым входом гид0 роусйли-теля а третий выход регулятора соединён с четвертым входом блока защиты и с входом анализатора, при этом анализатор выполнен в виде п-ого количества формиро- ; ватёлей й мпульсрв, первого, второго и
5 третьего элементов И, схемы ИЛИ, генератор импульсов и реверсивного счетчика, вы- ход: которого является выходом ; Анализатора, причем входы формирователей импульсов являются выходом регулято0. ра канала управления, выход каждого формирователя импульсов подключен к входам соответствующих первых и вторых компараторов, выходы первых компараторов подключены к соответствующим входам
S первого элемента И, выход которого соединен с первым входом второго элемента 1/1, выходы вторых компараторов подключены к соответствующим входам схемы ИЛИ, выход которой соединен с первым входом
0 третьего элемента-И, генератор импульсов подключен к вторым входам второго и третьего элементов И, выходы которого подключены -к соответствующим входам реверсивного счетчика.
5 Введение многоканального анализатора процесса регулирования, соединенного входами с выходами схем сравнения регуляторов все каналов, а выходом - с командным входом программного устройства и содержащего многовходовые схемы И или
ИЛИ, две двухвходовые схемы И, генератор и реверсивный счетчик импульсов, компараторы, попарно подключенные к выходам схем сравнения регуляторов каналов управления через формирователи сигналов позволяет обеспечить автоматическое управление скоростью перемещения регулируемого объекта путем корректировки параметров (скорости изменения) сигналов задания для всех каналов в зависимости от величин сигналов рассогласования в каналах, определяемых техническими возможностями, режимов работы, состоянием регуляторов перемещений и использумых источников энергии. Благодаря этому система управления установки выполняет дополнительные функции по сравнению с известными устройствами аналогичного назначения, что повышает точность синхронизации работы домкратов и ее надежность (в частности, позволяет своевременно и безаварийно отреагировать на изменения режимов работы, неисправности и другие факторы, определяющие возможности регуляторов и используемых источников энергии, а также на изменения в поведении регулируемого объекта).
Связь программного устройства с датчиками состояния регулируемого объекта (в частности, с датчиками кренов) позволяет автоматически корректировать для каждого из каналов заданные значения перемещений не только в соответствии с изменением общего наклона здания (при выравнивании), но также с учетом просадки грунта, деформаций основания и т.п., что способствует повышению точности работы установки, влияющей на состояние регулируемого объекта, и повышению ее надежности даже в неблагоприятных условиях, которые могут возникнуть в процессе регулирования.
Повышение надежности работы установки достигается также за счет следующих ее особенностей, позволяющих своевременно обнаружить неисправности и поломки элементов, отклонения от номинальных параметров процесса регулирования и тем самым снижать вероятность опасных ситуаций, ведущих к повреждению сооружения, положение которого регулируется;
- введение датчиков повреждения домкратов (что особенно эффективно при использовании домкратов с небольшим ресурсом);
- включение дифференцирующих и интегрирующих элементов в цепь контроля сигнала рассогласования с выхода схемы сравнения регуляторов для обнаружения опасных ситуаций по увеличению скорости изменения сигнала рассогласования и интеграла от этого сигнала еще до того, как величина собственно сигнала рассогласования достигнет предельного уровня;
- многовариантность реакции системы 5 аварийной защиты с элементами адаптации, достигаемая, в частности, за счет выполнения блока канальной защиты с несколькими связанными между собой индикаторами опасных ситуаций на базе поро0 говых элементов, реагирующих на различные проявления неисправностей,отклонений от номинальных режимов и т.п.
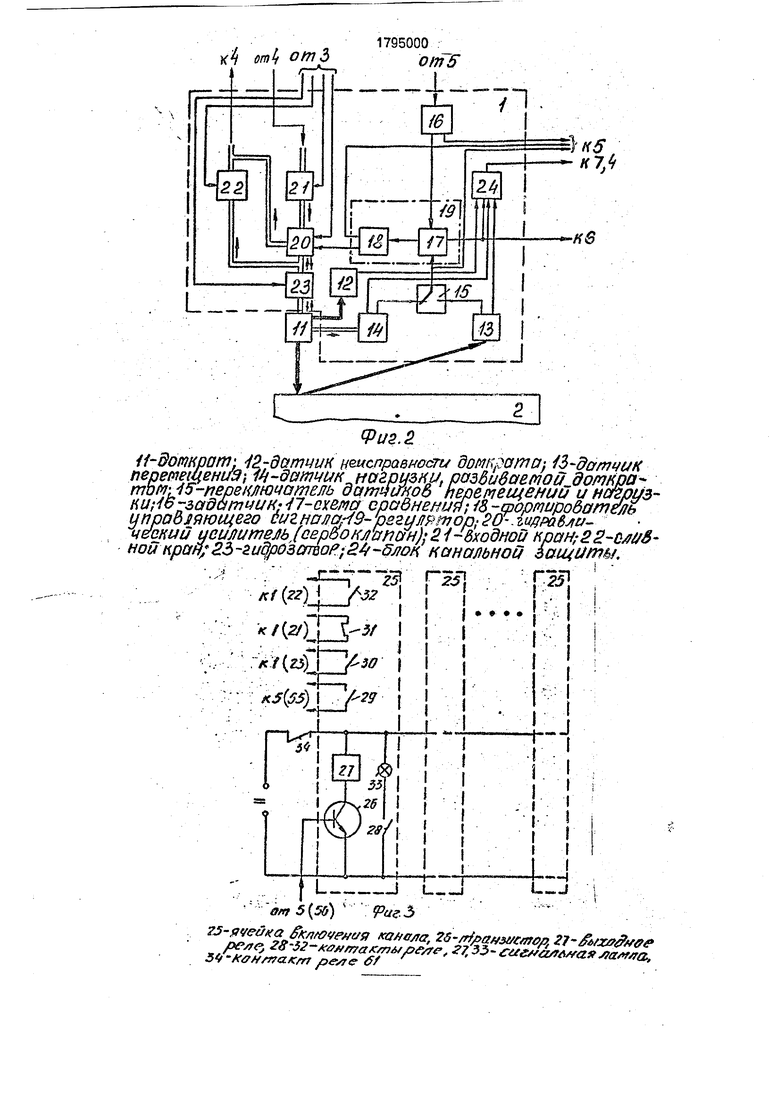
На фиг. 1 изображена структурная схема установки в целом; на фиг. 2 - структур5 ная схема канала управления домкратов; на фиг. 3 - электронная схема блока включе- ния; на фиг. А - структурная схема блока канальной защиты; на фиг. 5 - электрическая схема блока общей защиты; на фиг. 6 0 структурная схема мнгогоканального анализатора процесса регулирования; на фиг. 7 - структурная схема программного устройства; на фиг. 8 - блок-схема алгоритма работы программного устройства.
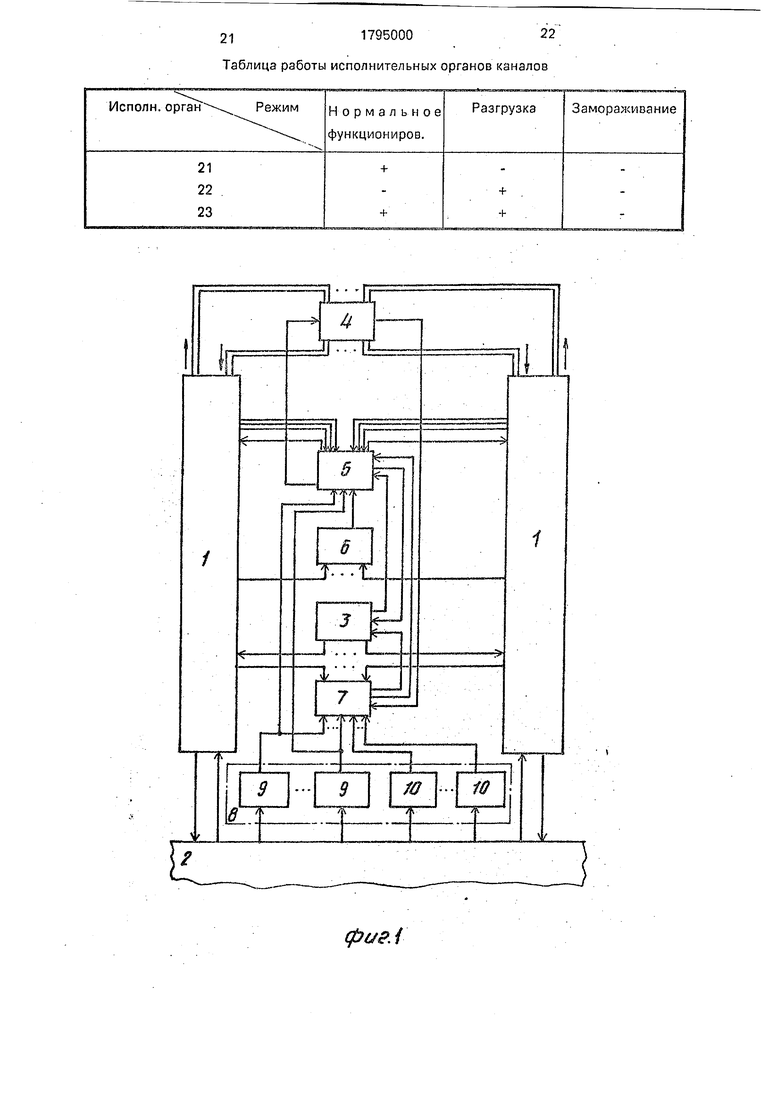
5 Установка для регулирования положения сооружений содержит: однотипные каналы 1 управления с домкратами, число которых зависит от грузоподъемности используемых домкратов, массы, размеров и
0 конструктивных особенностей перемещаемых или нагружаемых (регулируемых) конструкций 2 (на фиг. 1 показаны два канала); блок 3 включения каналов; источник 4 питания (маслонасосную станцию) для питания
5 гидросистем установки с устройствами включения, регулирования давления, контроля и аварийной защиты; программное устройство 5с пультом оператора и устройствами связи с объектом управления
0 (УСО)для выдачи команд блоку 3 включения каналам, устройствам управления маслона- сосной станцией 4, вычисления по введенным исходным данным (с учетом состояния объекта управления) и выдачи сигналов за5 дания по каждому из каналов 1 управления; контроля работы каждого из каналов; вывода текущей информации о программных и фактических значениях перемещений и (или) нагрузок в каждом канале; представления информации в виде, удобном для восприятия обслуживающим персоналом, ведения протокола процесса регулирования положения перемещаемого объекта или на5 грузок, приклздывамых к испытуемому объекту, выдачи оператору рекомендаций по управлению и др.; многоканальный анализатор 6 процесса регулирования во всех каналах 1; блок 7 общей защиты, реагирующий на опасные ситуации, связан- ные с нарушением функционирования каналов 1 и источник 4 питания недопустимыми изменениями состояния регулиремого объекта 2 и (или) его основания, коплекс 8 датчиков 9, 10, состояния регулируемого объекта и (или) его основания (датчики 9 представляют информацию для блока 7 общей защиты и программного устройства 5, датчики 10 - только для блка 7 общей заш,и- ты; информация датчиков 9, 10 может также использоваться для указателей состояния объекта управления, условно не показанных на фиг. 1) и гидравлический домкрат 11.
Каждый из каналов 1 включает в себя; датчик 12 неисправности домкрата 11; датчик 13 перемещений регулируемой конструкции 2 на участке размещения домкрата 11; датчик 14 давления в рабочей полости, домкрата или нагрузки (силы), создаваемой домкратом (датчики 13 и 14 обычно снабжаются нормирующими усилителями-преобразователями, на фиг. 2 условно не показанными); двухпозиционный переключатель 15 датчиков 13 и 14, положение которого определяет вид регулируемого параметра; задатчик 16, формирующий по командам программного устройства 5 сигнал задания для регулируемой величины канала; схему 17 сравнения заданного и фактического значений регулируемой величины, один из входов которой подключен либо к датчику 13, либо к датчику 14 в зави- симрсти от положения переключателя 15, а вторЬ й. вход - к задатчику 1.6; формирователь 18 управляющего сигнала (например, по ПИД-закону) из.сигнала.рассогласования между заданным и фактическим значениями регулируемой величины (схема 17 и формирователь 18 являются составными элементами регулятора 19); гидроусилитель (сервоклапан) 20 для управления расходом жидкости через рабочую полость домкрата 11 в соответствии с управляющим сигналом, сформированным в регуляторе 19; входной и сливной гидроклапаны 21 и 22 с электромагнитным управлением, связанные с бло- ком 3 включения каналов и установленные на магистралях гидравлического питания домкрата 11; гидрозатвор 23 с электромагнитным управлением на входной магистрали домкрата, позволяющий зафиксировать (заморозить) его состояние путем перекрытия этой магистрали (сервоклапан 20, гидрокраны 21, 22, имеющие значительные утечки в закрытом состоянии не могут обеспечить длительное надежное замораживание домкрата; кроме того, сливная магистраль сервоклапана 20 краном 22 во- обще не перекрывается); блок 24 канальной защиты, входы которого соединены с выходами схемы 17 сравнения и датчиков 12,13,
14, а выход - со входом блока 7 общей защиты.
В каждом канале 1 дополнительные (вторые) аналоговые выходы регулятора 19
(формирователя 18), задатчика 16, переключателя 15 подключены к программному устройству 5 для контроля соответственно управляющего сигнала и сигналов, пропорциональных заданному и фактическому зна0 чен иям регулируемого параметра. Основные (первые) аналоговые выходы за- датчика 16, переключателя 15 и формирователя 18 связаны со входами соответственно схемы сравнения 17 регулятора и сервокла5 пана 20, воздействующего на домкрат.
.Блок 3 включения, схема одного из вариантов которого приведена на фиг. 3, состоит из однотипных ячеек 2:5 включения по ч мелу каналов 1, каждая из ко ч-оых содер0 транзистор 26 С выходны -. оэле 27 в коллекторной цепи, управляем1 и по сигналам от программного устройства 5 Контакты этого реле 28,29, 30,31,32 используются соответственно для включения лампы (или
5 светодюда) 33, сигнализирующей о включении канала; подачи дискретного сигнала в программное устройство 5 о включении канала (обратная связь), управления гидрозатвором 24 и гидрокранами 21 и 22 канала. В
0 общую цепь питания ячеек 25 введен контакт 34 выходного элемента (реле) блока общей защиты, обеспечивающий при необходимости отключение всех ячеек (а следовательно, и отключение всех каналов
5 1) в аварийных ситуациях.
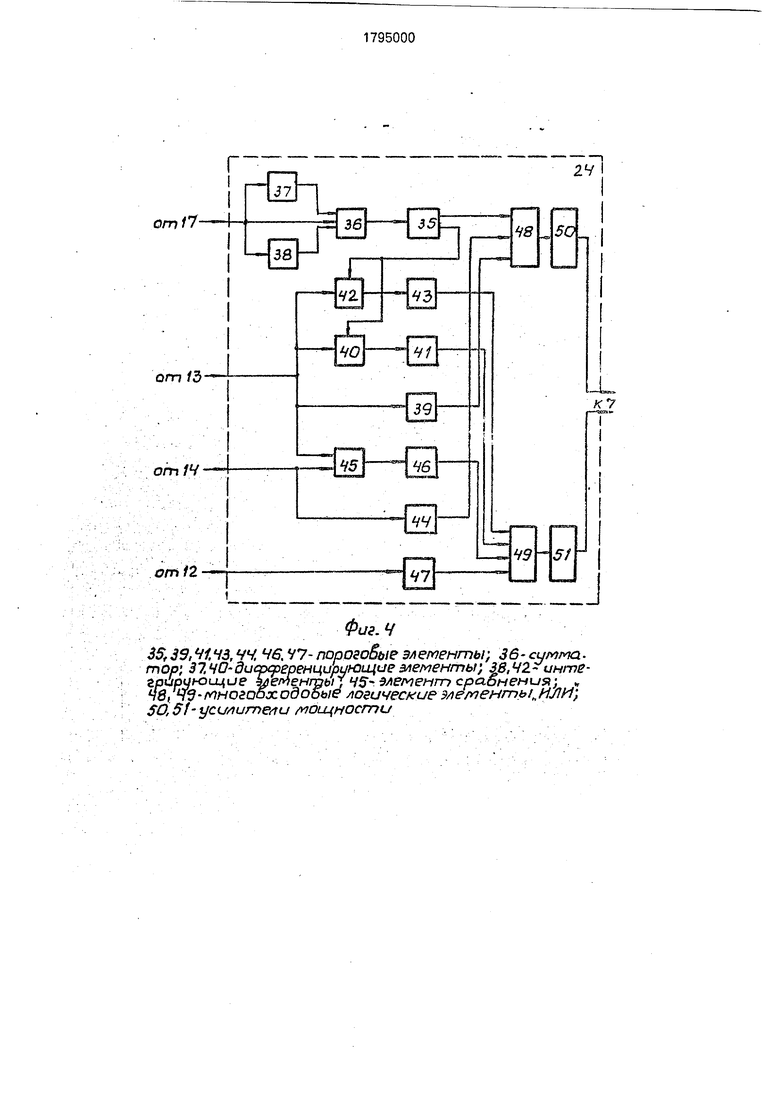
Блок канальной защиты включает; индикатор превышения предельно допустимого значения ошибки регулирования регулятора 19 на базе порогового элемента 35 и суммз0 тора 36, на входы которою поступает сигнал рассогласования от схемы 17 сравнения непосредственно, а также через дифференцирующий и интегрирующий элеметы 37 и 36; индикатор превышения предельного значе5 ни я перемещения, создаваемого домкратом, на базе порогового элемента 39, подключенного к выходу датчика 13 перемещений; индикатор предельного значения скорости изменения перемещения, созда0 ваемого домкратом 11 после срабатывания порогового элемента 35, на базе дифференцирующего элемента 40, подключенного к выходу датчика 13, и порогового элемента 41; индикатор превышения предельного
5 значения интеграла отперемещения, создаваемого домкратом, зависящего от величины изменения перемещения и длительности его действия после срабатывания порогового элемента 35, на базе интегрирующего элемета 42, подключенного к выходу датчика 13, и порогового элемента 3.2; индикатор превышения нагрузки, создаваемой домкратом 11, на базе порогового элемента 44, соединенного с выходом датчика 14; индикатор повреждения домкрата на базе порогового элемента 45, соединенного с выходом датчика 12; индикатор нарушений в работе канала, проявляющихся в изменении соотношения между перемещением и нагрузкой, создаваемыми домкратами 11, на базе элемента сравнения 47, соединенного с выходами датчиков 13 и 14, и порогового элемента 4.6; многовходовые логические элементы ИЛИ 48 и 49 с релейными усилителями мощности (например/в виде электромагнитных или электронных реле) 50 и 51. Число логических элементов ИЛИ (а следовательно, и усилителей мощности) определяется количеством способов реагирования на аварийные ситуации. Так, в показанном на фиг. 4 варианте схемы блока 24 канальной защиты предусмотрено два вида реагирования на аварийные ситуации - замораживание домкратов (при срабатывании пороговых элементов 35, 39, 44) и разгрузку домкратов (при срабатывании пороговых элементов 41,43,46,47). Необходимое количество входов в элементах ИЛИ определяется числом подключаемых к ним пороговых элеметов индикаторов аварийных ситуаций. Выходы усилителей мощности 50, 51 подключены ко входу блока 7 общей защиты. Дифференцирующий и интегрирующий элеметы 40 и 42 выполнены с командными (включающими) входами, к которым подключен дополнительный выход (например, дополнительный контакт выходного реле) порогового элемента 35.
В блок 24 могут вводиться дополнительные индикаторы аварийных ситуаций, не показанные на фиг. 4, в частности, индикатор нарушения процесса выравнивания, проявляющегося в несоответствии между изменением общего наклона выравниваемого здания и перемеа(ениями, создаваемыми домкратами 11 канала, выполненный на базе элемента сравнения, подобного 45, и со- поставлящего сигналы датчика 13 и датчика крена, входящего в состав комплекса датчиков 9 и 10, и порогового элемента.
Благодаря использованию дифференцирующего и интегрирующего элементов 37 и 38 и суммированию на входе в пороговый элемент 35 собственно сигнала рассогласования и сигналов, пропорциональных скорости изменения рассогласования и интегралу от рассогласования (сумматор 36 включает в себя элементы настройки необходимых пропорций между суммируемыми сигналами), индикатор срабатывает, не дожидаясь, пока величина рассогласования в результате.накопления ошибки регулирования существенно, возрастает, а сразу после возникновения тенденции к отклонению
5 темпов изменения регулируемого параметра по отношению к темпам, определяемым задатчиком 16, или (и) при наличии рассогласования, хотя и не превышающего по величине допустимого значения, но
0 сохраняющегося значительное время.
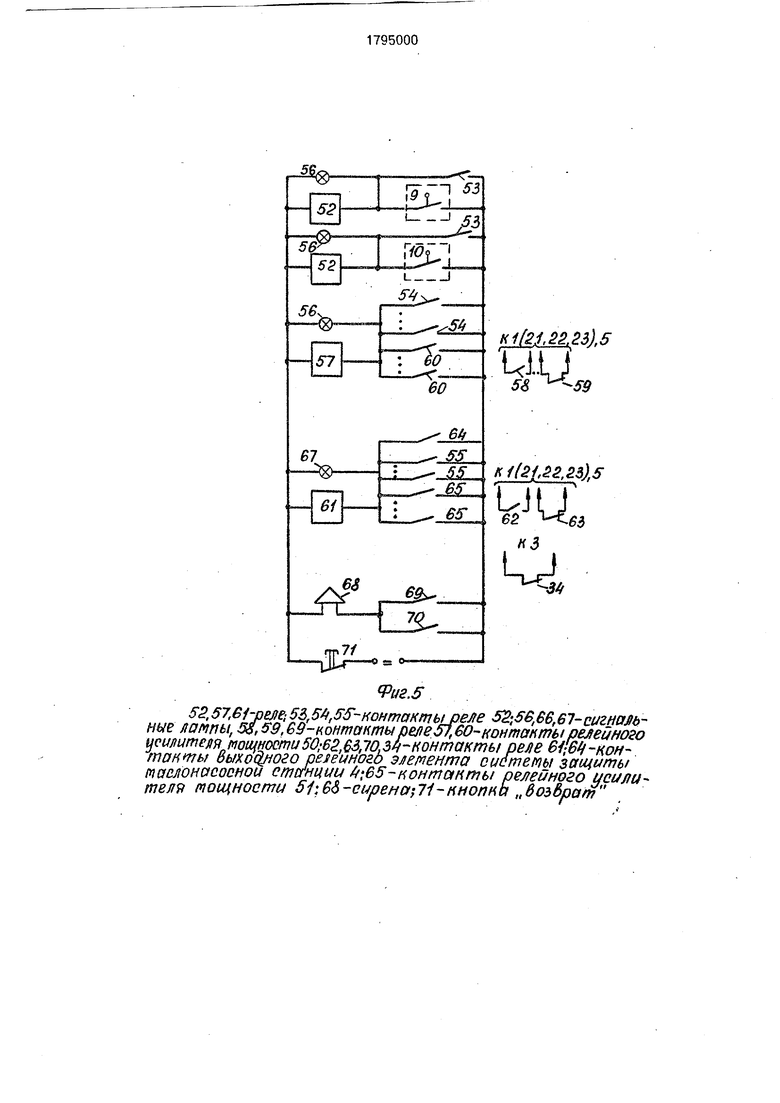
Представленный на фиг. 5 вариант выполнения блока 7 общей защиты содержит: несколько индикаторов аварийных ситуаций на базе выходных контактов датчиков 9
5 и 10 (Датчики 9 и 10 наряду с дискретным (релейным) выходом для использования в системе защиты могут иметь также цифровой или аналоговый выход для ввода в программное устройство 5 и использования в
0 указателях состояния объекта управления) состояния регулируемого объекта и его основания (на фиг, 5 показано два индикатора), каждый из которых снабжен реле 52 с контактами 53, осуществляющими самобло5 шровку реле, и 54, 55, включающими то или иное исполнительное реле блока 7, л.ампоч- ком (или светодиодом) 56, сигнализирующей о срабатывании соответствующего индикатора; исполнительное реле 57 включения
0 режима замораживания с контактами 58,
59 для управления гидрокранами 21, 22 и гидрозатвором 23 каналов 1 и для подачи сигналов в программное устройство 5; мно- говходовой логический элемент ИЛИ, вклю- 5 ченный в цепь обмотки реле 57, в виде параллельно соединенных замыкающих контактов 54 реле 52 и выходных контактов
60 релейных усилителей мощности 50 блоков 24 защиты каждого из каналов 1; ислол0 нительное реле 61 включения режима разгрузки с контактами 34 для выключения каналов (см. фиг. 3), 62, 63 для управления гидрокрэнами 21, 22 и гидрозамком 23 каналов 1 и для подачи сигналов в программ5 ное устройство 5; многовходовой логический элемент ИЛИ, включенный в цепь обмотки реле 61, в виде параллельно соединенных замыкающих контактов 64 выходного релейного элемента системы защи0 ты маслонасосной станции 4, контактов 55 реле 52 и выходных контактов 65 релейных усилителей мощности 51 блоков 24 защиты каждого из каналов 1; лампы (или светодио- ды) 66, 67, сигнализирующие соответствен5 но о включении режимов замораживания и разгрузки; сирена (или звонок) 68, сигнализирующая о срабатывании аварийной защиты и включаемая от контактов 69 или.70 соответственно реле 57 и 61; кнопка 71 (возврат) для приведения индикаторов на
реле 52 в исходное состояние после выяснения и устранения (при возможности) причин, вызвавших их срабатывание.
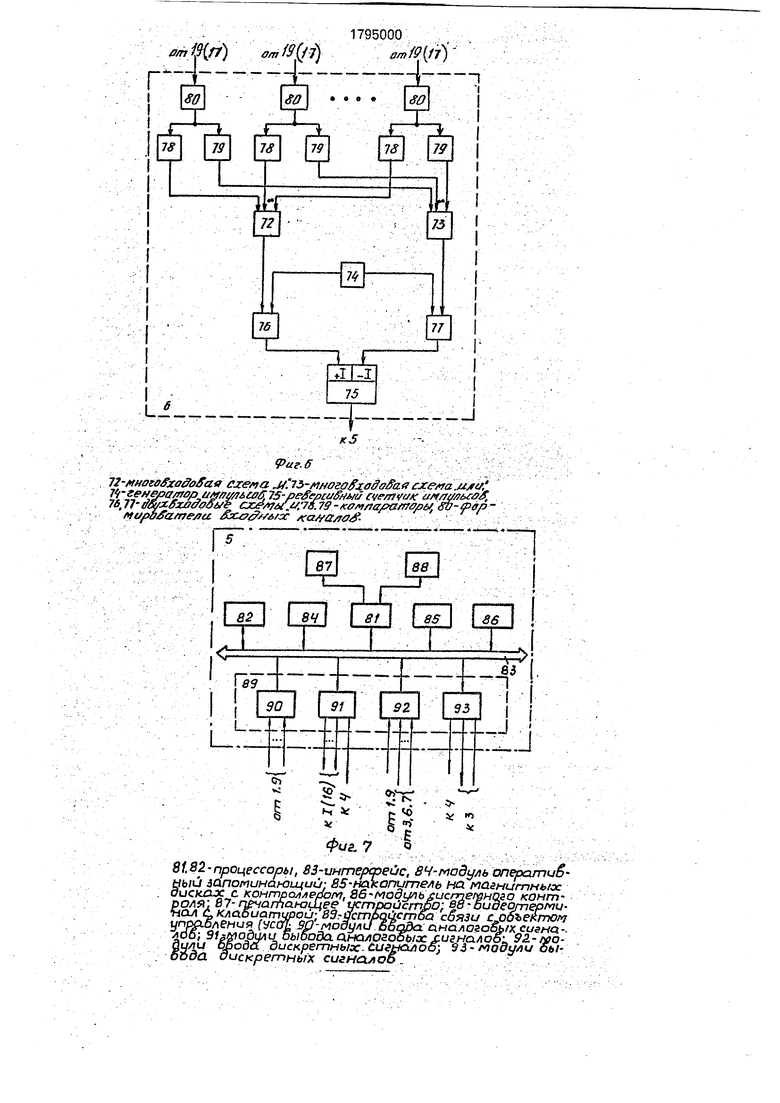
Многоканальный анализатор 6 процесса регулирования (см. фиг. 6) содержит: мно- говходовую схему И 72;. многовходовую схему ИЛИ 73 (количество входов в схемах 72 и 73 определяется количеством каналов 1 в установке); генератор 74 импульсов; реверсивный счетчик 75 импульсов, подключенный ко входу программного устройства 5 (непосредственно или через дополнительные, условно не показанные на фиг. 6 элементы, дешифрирующие и преобразующие сигналы счетчика таким образом, чтобы они могли быть восприняты элементами утсрой- стваб при коррекции параметров задающих сигналов, определяющих скорость перемещения или нагружения и поступающих к за- датчикам 16 в зависимости от величин сигналов рассогласования на выходе схем сравнения 17, зависящих от того, как справляются со своими задачами регуляторы 19, достаточна ли производительность питающей маслонасосной станции 4 и др.); две двухвходовые схемы И 76 и 77, первые входы которых соединены с выходом генератора 74, вторые входы - соответственно с выходами многовходовых схем 72 и 73, а выходы - соответственно с суммирующим и вычитающим входами счетчика 75; двухполюсные компараторы 78 и 79, попарно подключенные к выходам схем сравнения 17 регуляторов 19 каналов 1 через входные формирователи 80; причем в каждой паре компараторов один настроен на максимально допустимый уровень входного сигнала (сигнала рассогласования регулятора) и соединен выходом со входом схемы ИЛИ 73, а второй - на минимально достаточный уровень входного сигнала и соединен выходом со входом многовходовой схемы И 72,
Показанный на фиг; 7 вариант программного устройства 5, выполненный на базе двухпроцессорной микро-ЭВМ (например, типа СМ 1810), содержит следующие стандартные модули и устройства; 81 - модуль центрального процесса для арифметической и логической обработки информации, . определяемой системой команд микропроцессора К1810М86, управления устройствами ввода и вывода, памяти, хранения программ и промежуточных данных; 82 - модуль центрального процессора на базе микропроцессора КР580ИК80А для логической и арифметической обработки информации, управления устройствами ввода-вывода и памяти; 83 - интерфейс;
84 - модули оперативные запоминающие;
85 - накопители на магнитных дисках с контроллерами; 86 - модуль системного контроля для арбитража запросов интерфейса, обработки аварийных ситуаций в системе электропитания, сопряжения с органами управления и индикации; 87 - печатающее устройство; 88 - алфавитно-цифровой видеотерминал с клавиатурой; 89 - устройства связи с объектом управления (УСО); 90 - модули ввода аналоговых сигналов с
0 коммутатором; 91 - модули вывода аналоговых сигналов; 92 - модули ввода дискретных сигналов; 93 - модули вывода дискретных сигналов. Видеотерминал с клавиатурой 88 и печатающее устройство 87 являются ос5 новными элементами пульта оператора.
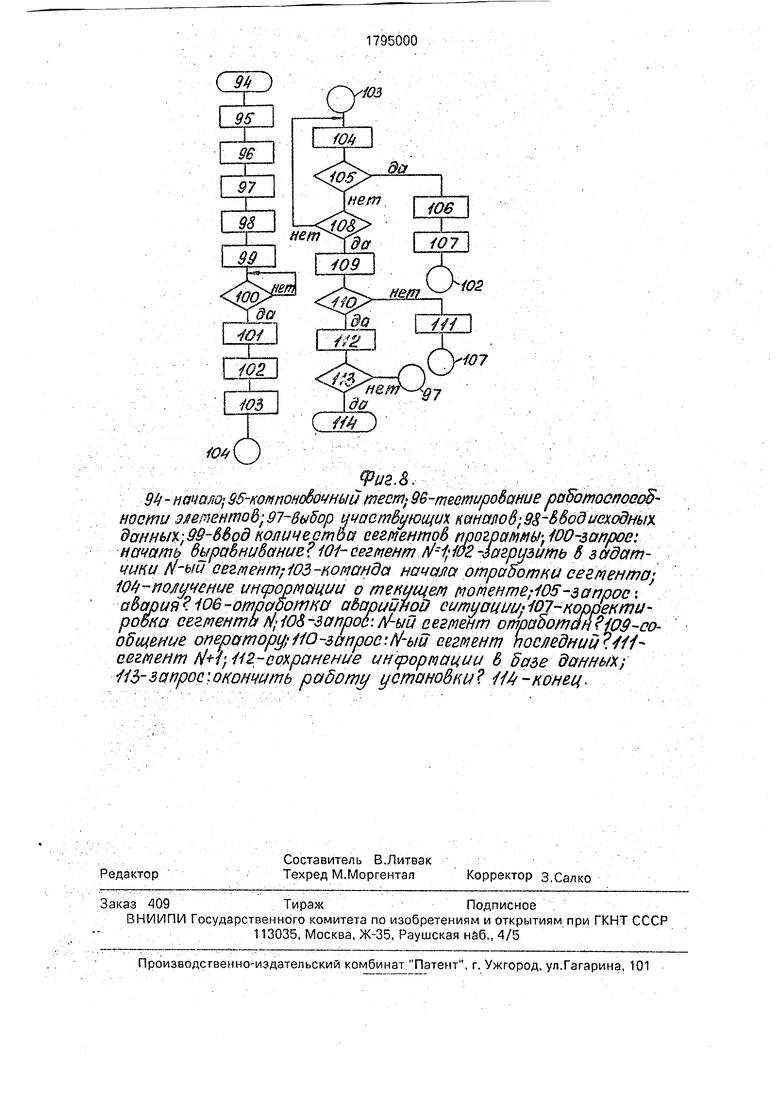
. Алгоритм функционирования программного устройства 5, определяющий после- . довательность действий установки в целом (см. фиг. 8), содержит следующие блоки: 94
0 - начало; 95 - компоновочный тест (проверка состава комплекса технических средств); 96-тестирование работоспособности и эле- метов системы управления; 97 - выбор участвующих каналов 1; 98 - ввод исходных
5 данных для каждого из участвующих каналов 1; 99 - ввод количества сегметов программы выравнивания (нагружения); 100 - запрос: начать выравнивание 101 - сегмент номер 102 - загрузить в задатчики
0 16 N-й сегмент программы выравнивания (нагружения); 103 - подача команды на начало обработки сегмента; 104 - получить от системы (в частности, от датчиков 9, каналов 1, анализатора 6, блока 7 общей защиты)
5 информацию о текущем моменте выравнивания или нагружения (для ведения протокола, корректировки исходных данных, индикации); 105 - запрос: авария Корректировать скорость выравнивания (нагруже0 ния) 106 - отработка аварийной ситуации; 107- корректировка сегмента N программы по данным датчиков 9. анализатора 6 и др.; 108 - запрос: N-й сегмент отработан 109 - сообщение оператору; 110-запрос: М-йсег5 мет последний 111 - сегмент N+1; 112 - сохранение информации в базе данных и вывод протокола; 113 - запрос: окончить работу установки 114 - конец.
Установка работает следующим обра0 зом.
Непосредственно процессу регулирования положения здания или сооружения предшествуют подготовительные этапы. Так, при выравнивании зданий предусмат5 ривается: подготовка здания, включающая выполнение ниш (проемов) между основанием и подъемной частью для установки домкратов 11 (ниши могут быть предусмотрены еще при строительстве здания); размещение, монтаж, подключение составных
элементов установки; сбор и обработка исходных данных; формирование программы выравнивания и ввод ее в программное устройство 5;-установка переключателя 15 в положение-, соответствующее характеру предполагаемого использования установки (в правое по схеме фиг, 2 положение - при использовании установки для перемещений объектов, а левое - при использовании для нагружения объектов, подвергаемых прочностным испытаниям); настройка элементов, в частности, предварительная установка значений ПИД-коэффициентов в формирователях 18 регуляторов 19, установка уровней срабатывания индикаторов аварийных ситуаций блоков 7 и 24, установка частоты импульсов генератора 74; опробование элементов и установки в целом, в частности, проверка работы каждого из каналов 1 в режиме ручного управления. .
. После завершения подготовительных операций программное устройство 5 начинает работу с проверки состава комплекса технических средств (компоновочного теста) и тестирования работоспособности установленных элементов. По результатам тестирования определяется количество работоспособных каналов 1 (блоки 94, 95), после чего установка переходит в состояние команды оператора. Допустимыми командами в этот момент являются ввод и редактирование исходных данных (в частности, ввод количества и номеров задействованных каналов 1, включаемых через блок 3 по командам, поступающим от модуля 93 вывода дискретных сигналов) и количества сегментов программы выравнивания или нагружения (N сегметов) (блоки 97, 98, 99). Включение каналов должно быть безударным, для его в момент запуска во всех каналах заданные начальные значения регулируемого параметра должны соответствовать фактическим значениям, зависящим от начальной настройки. После запуска каналов и ввода исходных данных начинается инициация непосредственно процесса выравнивания (нагружения). Первый сегмент загружается в задатчики 16 (блок 102) и выполняются блоки 103-107 (получение информации о текущем моменте вырвнива- ния или нагружения для ведения протокола, корректировки исходных данных и информации, анализ аварийной ситуации и обслуживание ее). Если сегмент отработан, то по данным датчиков 9, нализатора 6 и исходным данным корректируется следующий сегмент и цикл повторяется со следующим сегментом. Если отработан последний сегмент, то выводится протокол выравнивания
(нагружения) и информация о текущем процессе сохраняется в базе данных (блок 11-2). В процессе реализации программы устройство 5 выдает команды (с учетом показа- 5 ний датчиков просадки основания из комплекса 8) для задатчиков 16 задействованных каналов, формирующих аналоговые сигналы задания (в случае использования аналоговых регуляторов 19), которые изме0 няются по закону, обеспечивающему временной график процесса выравнивания, принимаемый в качестве исходного. В схеме 17 сравнения каждого из каналов 1 непрерывно вырабатывается сигнал,
5 пропорциональный разности между фактическим (определяемым по сигналам датчи- - ков 13 или .14) и заданным значениями регулируемого параметра; из сигнала рассогласования в формирователе 18 в соответ0 ствии с принятым законом вырабатывается
. управляющий сигнал, который после усиления по мощности поступает на входсервок- лапана 20., В зависимости от параметров управляющего сигнала сервоклапан 20 воз5 действует на расход жидкости, направляемой в домкрат 11, таким образом, чтобы рассогласование убывало до нуля, и в каждый момент времени фактическое значение регулируемого параметра равнялось задан0 ному. -. :. Анализатор 6 обеспечивает возможность автоматической корректировки скоро сти изменения регулируемого параметра (S определенном диапазоне, установленном
5 условиями конкретного применения установки) в зависимости от величин сигнала рассогласования в регуляторах 19. Алгоритм ра боты системы коррекции.скорости изменения регулируемого параметра на бз0 зе анализатора 6 следующий: если сигналй рассогласования регуляторов в каждом из1 каналов 1 управления меньше минимального уровня, определяющего выбранную ми нимальную погрешность управления, нижВ
5 которой нецелесообразно работать, то вы дается команда на увеличение скорости; ёб- ли хотя бы в одном из каналов сигнал рассогласования превышает максимальный уровень, определяющий максимально допу
0 стимую погрешность, то выдается команде
на уменьшение скорости изменения регулй руемого параметра.
Анализатор 6 по схеме фиг. 6 работает следующим образом.
5 Сигналы рассогласования с выхода схем-17 сравнения регуляторов 19 черезУ формирователи 80 поступают на компараторы 78,79. Выходы компараторов 78, настр й- енных на минимально достаточный уровеШ величины сигналов рассогласования, соёДй
йены со входами многовходовой схемы И 72, а выходы компараторов 79, настроенных .на максимально допустимый уровень величины сигналов рассогласования. - со входами схемы ИЛИ 73.
При номинальном значении скорости изменения регулируемого параметра величины сигналов рассогласования в каналах 1 управления находятся в допустимых пределах, на выходах компараторов 78 и 79 присутствуют низкие уровни напряжений, которые создают на выходе элементов от генератора 74.
При уменьшении величин сигналов рассогласования во всех каналах 1 ниже минимально достаточной величины на выходах всех компараторов 78 появляются высокие уровни напряжения, крторые при совпадении создают на выходе элемента 72 логическую единицу, открывающую элемент 76 для прохождения через него импульсов от генератора 74. Эти импульсы поступают на суммирующий вход реверсивного счетчика 75, и число, записанное в нем, .начинает увеличиваться, обеспечивая тем самым воздействие на программное устройство 5. при котором скорость изменения сигнала задания регулирующего параметры по всем каналам корректируется в сторону увеличения (частота импульсов генератора 74 выбирается в соответствии с динамическими характе- ристиками регулятора и регулируемого объекта таким образом, чтобы длительность пауз между импульсами обеспечивала возможность завершения переходных процессов в системе управления скоростью изменения регулируемого параметра до поступления в счетчик 75 следующего импульса). Процесс этот длится до тех пор, пока скорость изменения регулируемого параметра не повысится до уровня, при котором величина сигнала рассогласования одного или нескольких каналов достигает предельно допустимых пределов.
Если при достижении максимально возможного значения скорости изменения регулируемого параметра величины рассогласований в каналах 1 не достигнут допустимого уровня, сигнал прямого переноса с выхода счетчика 75 после его переполнения используется для перекрытия доступа импульсов от генератора 74 к выходу счетчика (например, с помощью условно не показанной на фиг. 6 двухвходовой схемы И, включаемой между элементами 72 и 76) и будет поддерживаться максимально возможное значение скорости до тех пор, пока по тем или иным причинам не сформируется сигнал на уменьшение скорости.
При достижении хотя бы одним из сигналов рассогласования максимально допустимой величины на выходе соответствующего компаратора 79 появляется высокий уровень напряжения. На выходе элемента 73 возникет логическая единица, открывающая элемент 77 для прохождения через него импульсов с генератора 74. Эти импульсы поступают на
0 вычитающий вход реверсиного счетчика 75 и число, записанное в нем, начинает убывать, обеспечивая тем самым воздействие на программное устройство 5, при котором скорость изменения сигнала задания регу5 лируемого параметра по всем каналам корректируется в сторону уменьшения. Как только скорость изменения регулируемого параметра достигает уровня, при котором величины сигнала рассогласования во всех
0 каналах войдут в допустимые пределы, элемент 77 закроется и импульсы с генератора 74 перестанут поступать на вычитающий вход счетчика 75. .
Если при уменьшении скорости измене5 ния регулируемого параметра достигается принятое из условий конкретного применения установки минимальное значение скорости, а рассогласование хотя бы в одном из каналов 1 больше допустимого (что является
0 признаком нарушения нормального режима работы), то по сигналу обратного переноса с выхода счетчика 75, направляемому в программное устройство 5 или в блок 7 общей защиты, установка прекращает осущёств5 лять регулирование-(цепи для использования сигналов прямого и обратного переноса с выхода счетчика 75 на фиг. 6 условно не показаны).
Идентификация опасных (предаварий0 ных) ситуаций в процессе выравнивания осуществляется индикаторами, входящими в состав блока 7 общей защиты и блоков 24 канальной защиты. .
Блок 7 обнаруживает превышение пре5 дельных значений просадки и деформаций основания, параметров, характеризующих состояние выравниваемого (или испытуемого) сооружения, в частности, появление трещин, опасных перераспределений
0 напряжений и др.
Блоки 24 обнаруживают для каналов 1 превышение установленных предельных значений параметров сигналов рассогласования (собственно сигнала рассогласова5 ния, его производной и интеграла) в регуляторе 19, перемещений на участке установки домкрата 11 канала, давления в рабочей полости домкрата (или нагрузки, .развиваемой домкратом), повреждения домкрата, несоответствия мжеду давлением
в рабочей полости домкрата и создаваемым им перемещением, свидетельствующего, в частности, о повреждении домкрата, несоответствия между изменением общего наклона выравниваемого, здания и перемещением на участке установки домкрата, свидетельствующего о нарушении нормативного хода выравнивания.
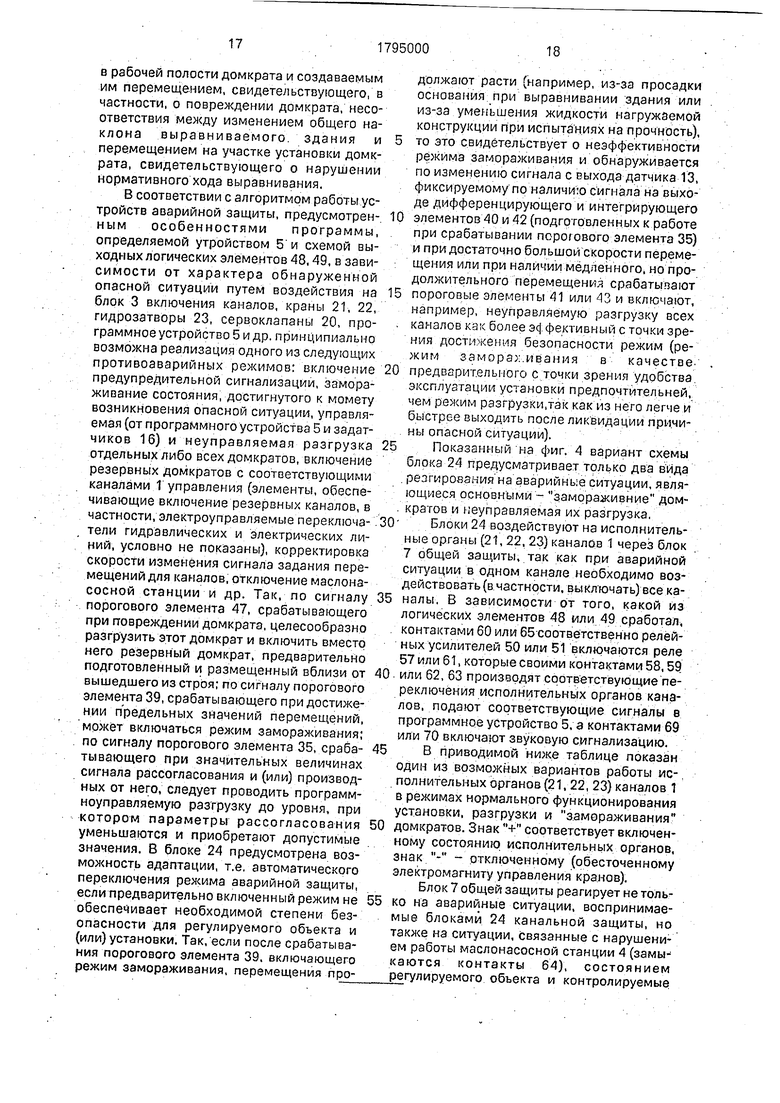
В соответствии с алгоритмом работы устройств аварийной защиты, предусмотренным особенностями программы, определяемой утройством 5 и схемой выходных логических элементов 48,49, в зависимости от характера обнаруженной опасной ситуации путем воздействия на блок 3 включения каналов, краны 21, 22, гидрозатворы 23, сервоклапаны 20, программное устройство 5 и др. принципиально возможна реализация одного из следующих противоаварийных режимов: включение предупредительной сигнализации, замораживание состояния, достигнутого к момету возникновения опасной ситуации, управляемая (от программного устройства 5 и задат- чиков 16) и неуправляемая разгрузка отдельных либо всех домкратов, включение резервных домкратов с соответствующими каналами 1 управления (элементы, обеспечивающие включение резервных каналов, в частности, электроуправляемые переключатели гидравлических и электрических линий, условно не показаны), корректировка скорости изменения сигнала задания перемещений для каналов, отключение маслона- сосной станции и др. Так, по сигналу порогового элемента 47, срабатывающего при повреждении домкрата, целесообразно разгрузить этот домкрат и включить вместо него резервный домкрат, предварительно подготовленный и размещенный вблизи от вышедшего из строя; по сигналу порогового элемента 39, срабатывающего при достижении предельных значений перемещений, может включаться режим замораживания; по сигналу порогового элемента 35, срабатывающего при значительных величинах сигнала рассогласования и (или) производных от него, следует проводить программ- ноуправляемую разгрузку до уровня, при котором параметры рассогласования уменьшаются и приобретают допустимые значения. В блоке 24 предусмотрена возможность адаптации, т.е. автоматического переключения режима аварийной защиты, если предварительно включенный режим не обеспечивает необходимой степени безопасности для регулируемого объекта и (или) установки. Так, если после срабатывания порогового элемента 39. включающего режим замораживания, перемещения продолжают расти (например, из-за просадки основания; при выравнивании здания или из-за уменьшения жидкости нагружаемой конструкции при испытаниях на прочность), 5 то это свидетельствует о неэффективности режима замораживания и обнаруживается по изменению сигнала с выхода датчика 13, фиксируемому по наличию Сигнала на выходе дифференцирующего и интегрирующего
10 элементов 40 и 42 (подготовленных к работе при срабатывании порогового элемента 35) и при достаточно большой скорости переме- : щения или при наличии медленного, но продолжительного перемещения срабатывают
15 пороговые элементы 41 или 43 и включают, например, неуправляемую разгрузку всех , каналов как более эффективный с точки зрения достижения безопасности режим (режим замораживания в качестве.
0 предварительного с точки зрения удобства, эксплуатации установки предпочтительней, чем режим разгрузки.так как из него легче и быстрее выходить после ликвидации при.чи- . ны опасной ситуации).
5 Показанный на фиг. 4 вариант схемы блока 24 предусматривает только два вида . реагирования на аварийные ситуации, являющиеся основными- замораживние дом- . кратов и неуправляемая их разгрузка.
0 Блоки 24 воздействуют на исполнительные органы (21, 22, 23) каналов 1 через блок 7 общей защиты, так как при аварийной ситуации в одном канале необходимо воздействовать (в частности, выключать) все ка5 налы. В зависимости от того, какой из логических элементов 48 или 49 сработал, . контактами 60 или 65 соответственно релейных усилителей 50 или 51 включаются реле 57 или 61, которые своими контактами 58,59
0. или 62, 63 производят соответствующие переключения исполнительных органов каналов, подают соответствующие сигналы в программное устройство 5, а контактами 69 или 70 включают звуковую сигнализацию.
5 В приводимой ниже таблице показан один из возможных вариантов работы ис-, полнительных органов (21, 22, 23) каналов 1 в режимах нормального функционирования установки, разгрузки и замораживания
0 домкратов. соответствует включенному состоянию исполнительных органов, знак - - отключенному (обесточенному электромагниту управления кранов).
Блок 7 общей защиты реагирует не толь5 ко на аварийные ситуации, воспринимаемые блоками 24 канальной защиты, но также на ситуации, связанные с нарушением работы маслонасосной станции 4 (замыкаются контакты 64), состоянием регулируемого обьекта и контролируемые
индикаторами на реле 52, испольующими сигналы датчиков комплекса 8. Прои этом некоторые из этих Индикаторов при срабатывании о.беспечивают включение разгрузки (при замыкании контактов 54 реле 52), а некоторые - включение замораживания (при замыкании контактов 55 реле 52). При включении режима аварийной разгрузки контакты 34 реле 61 могут отключать все каналы (см, фиг. 3). Насосная станция 4 моo
жет при этом отключаться по сигналам программного устройства 5, инициированным при замыкании контактов 62 реле 61.
Использование изобретения повышает надежность работы автоматизированной системы управления выравниванием сооружений, размещенных на проеадбчных, неравномерно сжимаемых грунтах и подрабатываемых территориях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования положения сооружений | 1989 |
|
SU1818418A1 |
| Стенд для прочностных испытаний конструкций | 1989 |
|
SU1651125A1 |
| Стенд для испытаний на прочность | 1985 |
|
SU1392416A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Устройство для статических испытаний конструкции на прочность | 1989 |
|
SU1651145A1 |
| Устройство для автоматического регулирования температуры | 1988 |
|
SU1645945A1 |
| Устройство автоматического согласования и контроля режимов многоступенчатых насосных и гидротранспортных установок | 1982 |
|
SU1079568A1 |
| Устройство для регулирования скоростигРупп МАшиН пРи иСпыТАНияХ HATPEKE | 1979 |
|
SU805270A1 |
| Система подъёма и выравнивания здания, сооружения | 2003 |
|
RU2224845C1 |
| Цифровой регулятор | 1979 |
|
SU930230A1 |
Использование: строительство, в частности для подъема, опускания и горизонтального перемещения сооружений, содержит; программное устройство 5, источник 4 питания, гидравлические домкраты с каналами 1 управления, каждый из которых включает датчик перемещения сооружения, задатчик, регулятор, датчик неисправности, датчик Давления, Двухпозиционный переключатель, гидроусилители, гидрозатвор, блок защиты, входной и выходной сливные позиционные гидрокраны, анализатор 6, блок 3 включения, блок 7 общей защиты и датчики 8 контроля состояния Сооружений. 1 з.п. ф-лы, 8.ил.. .
Ф о р м у л а и з о б рё тё ни я 1. Установка для регулирования полоения сооружений, содержащая программ- ое устройство, источник питания, идравлические Дрмкратй с каналами управления, каждый из которых включает Датикперемещения Сооружения, задатчик, регулятор и входной и сливной позиционные гидрокраны, причем первый выход за- атчика подключен к первому входу регулятора, второй выход задатчйка - к первому входу программногб устройства; а вход задатчйка-к первому выходу программного стройства,о f л ич а ю щ а я с я тем, что, с целью повышения надежности работы установки, она снабжена анализатором, блоком включения, блоком общей защиты и датчиками контроля состояния сооружения, а в каждый канал управления введены гидрой усилитель, гидррзатвЬр. датчик неисправности домкрата, датчик давления, датчик перемещения сооружения, двухпозицион- ный переключатель и блок защиты, причём выход анализатора подключен К второму входу программного устройства, третий вход которого соединен с первым выходом блока включений первый вход которого подключён к второму выходу программного устройства, четвертый вход которого подключён к первому выходу блока общей защиты, второй выход которого подключён к второму входу блока включения, первый вход блока общейi защиты соединен с источником питания, датчик неисправности дом- крата соединен с первым входом блока защиты, второй вход которого соединён с первым выходом датчика давления, третий вход блока защиты пЬдключен к первому входу датчика перемещения сооружения, второй вход которого и второй вход датчика давления подключены к соответствующим входам двухпозйциоНного переключателя, выход которого соединен с вторым входом регулятора и с пятым входом программного
устройства, одни датчики контроля состояния сооружения подключены к одним соот, вётстйующим входам блока общей защиты и к остальным входам программного устройства, другие датчики контроля - к другим соответствующим входам блока общей защиты, третий выход программного устройства соединен с источником питания, второй выход блока включения подключен к первому входу гидроусилителя, к входам входного и сливного гидрокранов и к гидрозатвору, который гидравлически связан с гидроусилителем И сливным гидрокраном, первый вход блока общей защиты подключен к выходу блока защиты, второй выход регулятора соединен с вторым входом гидроусилителя, а третий выход регулятора соединён с четвертым входом блока защиты и с входом анализатора. : ;
211795000 22 Таблица работы исполнительных органов каналов
фиг.
Ъмг 1гх2 м ю УЮ-fete &J ew0i %2 Ј2& ff фаау-а VMw Zfyf-ez там/о
$(&:..,., (#)$,,
/9u/flfaae понманан uoifg-tzfjoaweoc/bnz-ezSHndy пон
-ffffW-ggtooay поидохд- цнацамодаэоГмдШПМзп пппЬзн
-аьдфйпг -ng Wow tarпгщ -йжиан гпз огдЬкнмдоаип
ЗУршвдоЗпыафЬ- & Српиэндаао яыэхз-/ i fynttuiaoav- о//
ftfiCf2/}H fi flfJMdfTJdkl dC: 111 s tmL-inrif гититй-пишы - / r,.u
oa5woe - - --XfJhUJOQSjuo.
OOOSSil
(b
3
$uto ip
Г
от 17О/Т7 /5
от 14
Фиг.Ч
3$t39,41,43, 44, 46. У7- порозоЁые элементы; 36- сумма. тор; 37.40-дифференцирующие элементы , 38,42-инте- грориюсцие мементь } 45- мемепгп сравнения} „ 48, 43 многоох одооые логические элементь1„ ИЛИ Г SO, 51- усилители /общности
50
Фиг.5
$2,57,е1-реле15&,5Ь,)5-хонтакть1реле 52;56,вв,б1-сигнальные пампы, &,59,е9-конташырме№бО-контакп Ь1рией1ЮЫ усмитем ощнмтищ..зЯ-контактьг реле в1$4-контакты выхо&огорелейного элемента системы защиты тамонасоснои етсгнции tt-t65-контакты релейного иеили- теля мощности 51;6&-сирен У;71-кнопкЬ „возврат
i2-MHOiOficaffoЈcte ехефа л 13-многоЈха/ вЈав cx e-ffaMrif 75-еенера/я0р UMffy/iAcaff75-peSeptejfff /u cvetntftf : aM/ u0&f0a, 76.77-dSyxSzatfooi/e cxf/VM.78.79 -капла/язлта/эб/, ffu-pff/y- Mt/po&z/ne/ia, &c04 ss&f3C ка#а/г0&
82 avj | si jss
o
к v
v
ТГ
:
.
g Фиг. 7 °
За Лналогооь/х игналоо 92- ly/iu Уроди дискретных- Сагмалоо; - - ода дискретных сигналоо.
a6
%г « V
::. . Фиг.&, ...., . , .. -.;;.. 94-начащ 95-компоно&очный тест; 9в-тесггшроЬание работоспособности эяе®енпюЬ:97 вы5ор ичастВиющц к&нано& Ж &Водисходны
л л Yf J - fS f. - . .. . .
tfi/ fu/. tf-b/if сегмент; ЮЗ-команда начала отработки сегмента 10Ь получение информации о текущем моменте;i05-запрос-, а&аоия 106 -отработка а&ортной ситуации: Ю7 корректировка сегментаriilO&-3anpoe .ti-biU сегмент ompabomaW №9 oo- о5щвниг оператору; МО-запрос :M-biu сегмент последний 411- сегмент /V /;И2-сохранение информации в 5аде данных; 11$-запрос докончить радо ту установки 4М-конец
| Методические указания по выравниванию бескаркасных зданий на подрабатываемых территориях с помощью домкратов | |||
| Киев, НИИСК | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
