оо со о ел
Изобретение относится к электро- технике, в частности к системам авто saтичecкoгo регулирования скорости электродвигателя с. частотным датчиком и фазовым компаратором в канале регулирования„
Цель изобретения - повышение точности, упрощение и уменьшение времени настройки динамических характерис тик.
На чертеже представлена функцио- н альная схема электропривода о
Электропривод содержит электродвигатель 1 с частотным датчиком 2 скорости, первый задатчик 3, генератор 4 импульсов, выход которого, через последовательно соединенные Первый управляемый делитель 5 частоты, фазовый компаратор 6 и силовой ключ 7 подключен к якорной обмотке электродвигатехш 1 , Вход, второго делителя 8 частоты через формирователь 9 импульсов подключен к выходу частотного датчика 2 скорости, а ЕЫход К ВХОДУ начальной установки третьего управляемого делителя 10 частоты. Кроме того, выход генератора 4 импульсов подключен к первому входу первого логического элемента И 11 и к счетным входам третьего, четвертого и пятого управляемых делителей .10, 12 и 13 частоты Выход первого управляемого делителя 5 часто- Tbi соединен с его входом управления начальной уставкойс. Bxo№i задания кодов начальной установки третьего и четвертого управляемых делителей 10 и. 12 частоты подключены к выходу первого задатчика 3 Выход второго за- датчика 14 соединен с входом задания кода начальной установки пятого упраляемого делителя 13 частоты, входом управления начальной установки сое- даненного с его выходом, первым входом второго логического элемента И 15 и первым входом третьего логического элемента И 16„
Вход управления начальной установкой четвертого управляемого делителя 12 частоты подклк1чен к выходу второго делителя 8 частоты и входу начальной установки счетчика 17. Учетный вход счетчика 17 подключен к выходу второго логического элемента И 15, второй вход которого соединен с выходом четвефтого управляемого делителя 12 частоты„ Выходы тре- тьего управляемого де:штеля 10 часто
ты и счетчика 17 соединены соответственно с первым и вторым входами сумматора 18, выходом подключенного к второму входу первого логического элемента И 11, входу логического эле мента НЕ 19 и одновибратора 20, Выход одновибратора 20 соединен с входом начальной установки реверсивного счетчика 21, вход прямого счета которого подключен к выходу первого логического элемента И 11. Вход обратного счета реверсивного счетчика 21 соединен с выходом.третьего логического элемента И 16, вторым входом соединенного с выходом логического элемента НЕ 19. Выход реверсивного счетчика 21 подкгяочен к второму входу ф азового компаратора 6о
Электропривод работает следующим образом.
Импульсы эталонной частоты f, получаемой делением на первом делителе 5 в п раз частоты f генератора 4, сравниваются по фазе со скорректированными импульсами частоты fцк- Час-
г 0 0
5
0
5
тота уц в среднем равна измеренной частоте f и имеет фазовый сдвиг, пропорциональный корректирующему сигналу. Частота f получается путем деления вторым делителем 8 частотного сигнала, вырабатываемого частотным датчиком 2, соединенным с валом исполнительного электродвигателя 1. При этом сигнал с частотного датчика предварительно формируется формирователем 9. С приходом каждого импульса частоты f 3 фазовый компаратор 6 подключает через силовой ключ 7 исполнительный электродвигатель 1 к сети, а с прих;одом каждого импульса частоты f выдает сигнал на торможение исполнительного электродвигателя, т.е. среднее напряжение на электродвигателе 1 пропорционально разности фаз сравниваемых частот fg и f.
Коррекция, необходимая для обеспечения устойчивой работы электропривода и работающая тотшко при небольших рассогласованиях частот f, и ц, осуществляется изменением фазы сигнала частоты f на величину, пропорциональную отклонению скорости вращения вала, исполнительного двигателя. Установившийся режим работы устройства возможен только при
3
или . Поэтому отклонение
скорости от установившегося значения
м эта-
можно выявить, сравнивая период Т измеренной частоты с периодом Т лонной частоты.
Для упрощения введения опережаю- щего по фазе частоту, fy сигнала при отрицательной разности сравниваемых периодов, возникающей при отклонении скорости вращения двигателя вверх от установивщегося значения, в электро- привод вводится начальный сдвиг по фазе в установившемся режиме () между измеренной fw и скорректированной f Р| частотами такой величины, чтобы расширенная к К,, раз разность между периодами Т у и вычитаемым временным интервалом Т была равна половине периода Т, эталонной частоты
(-То)К,2|- ,
, jg 15
Учитывая, что
M-N,N,,
получим
п . 2 21,
(3) (4)
, jg 15
20
где Т,- - период следования импульсов
генератора 4
До заполнения четвертого делителя 12 частоты через второй элемент И 15 разрешено прохождение импульсов от пятого делителя 13 частоты в счетчик 17. Коэффициент деления пятого делителя 13 определяется кодом начальной установки, подаваемым от второго устройства 14 задания. При переполнении этого делителя начальный код вносится вновь. Следовательно, в счетчик 17 запишется п., импуль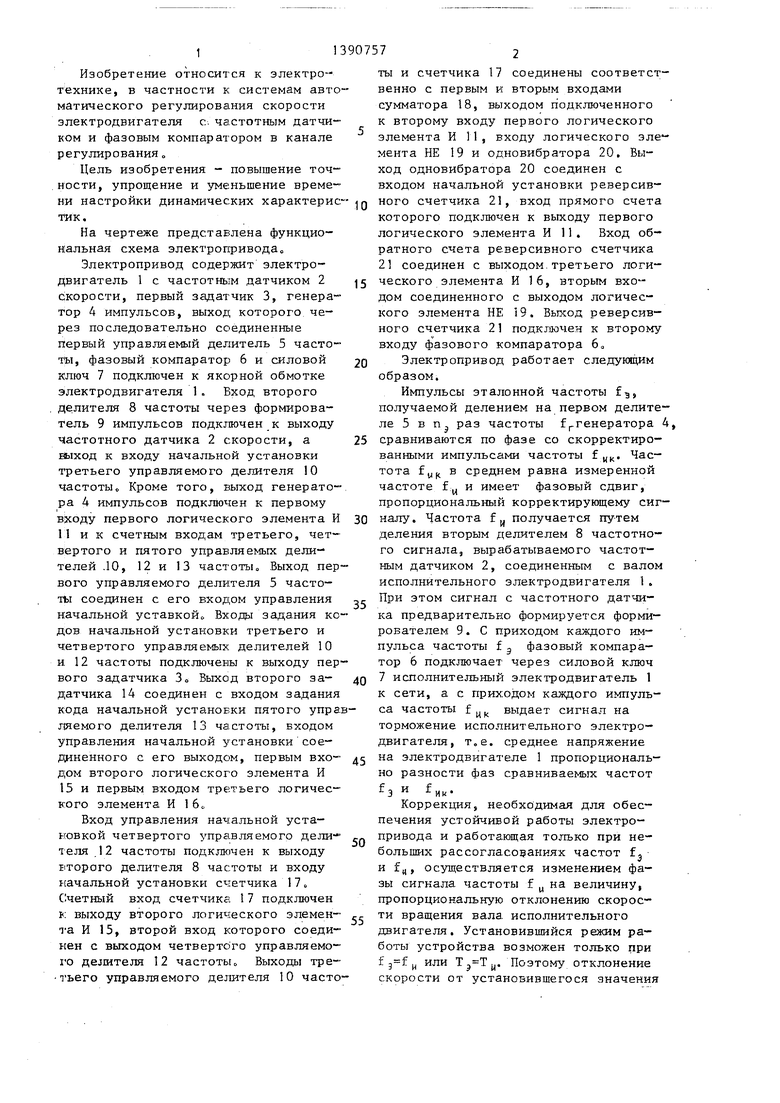
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1986 |
|
SU1661951A1 |
| Стабилизированный вентильный электропривод с комбинированным управлением | 1987 |
|
SU1610588A1 |
| Электропривод постоянного тока | 1982 |
|
SU1045344A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2462809C1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2467465C1 |
| КВАЗИКОГЕРЕНТНЫЙ МОДУЛЯТОР СИГНАЛОВ КВАДРАТУРНОЙ ФАЗОВОЙ МАНИПУЛЯЦИИ | 2014 |
|
RU2581646C1 |
| Устройство для программного управления шаговым двигателем | 2021 |
|
RU2784828C1 |

) Изобретение относится к электротехнике, в частности к системам автоматического регулирования скорости электродвигателя с частотным датчиком и фазовым компаратором в канале регулирования о Целью изобретения является повышение точности, упрощение и уменьшение времени настройки динамических характеристик. Электропривод имеет повышенную точность настройки динамики электропривода с частотным датчиком, требует меньше времени для этой настройки и отличается ее простотой ввиду уменьшенной дискретности изменения коэффициента настройки пропорциональной составляющей регулятора электропривода, уменьшенную дискретность временного интервала,, вычитаемого из периодов измеренной частоты, установка к-рого происходит одновременно с изменением коэффициента пропорциональной состав- с ляющейо 1 ило (Л
где К,, - коэффициент расширения отклонения, выбираемый из условия обеспечения устойчивой работы и качественной динамики электропривода.
Коррекция измеренного сигнала осуществляется следующим образом. По переднему фронту измеренной частоты в третий 10 и в четвертый 12 делители записывается код начальной установки от первого устройства 3 задания, а нереверсивный счетчик 17 уста- навлив ется в ноль. Полная емкость третьего делителя 10 частоты равна полной емкости первого делителя 5 частоты, а полная емкость четвертого делителя 12 частоты в два раза меньше. Соответственно, в третий делитель 10 частоты вносится от устройства 3 полней код начальной установки
N
sen
а в четвертый делитель 12 - в
„ Nsoin два раза меньший -г-.
Импульсы на счетные входы третьего, четвертого и пятого делителей 10, 12 и 13 подаются от общего генератора 4. Следовательно, четвертый делитель 12 полностью заполняется при поступлении на его вход п.. импульсов от генератора 4. Число этих импульсов определяется выражением
М N зАп
г,
(2)
где М - максимальная емкость делителей 5 и 10.
сов
п t
.-iT э
К.) 2К,,Т
(5)
нли
Выбором величины Пс можно обеспечить изменение К с любой малой дискретностью.
Сумматор J 8 выдает сигнал разрешения на запись в реверсивный счет- чик 21 через Первый элемент И 11 HNT- пульсов с частотой генератора 4 при условии, что содержимого счетчика 17 и текущего значения содержимого третьего делителя 10 превышает емкость (разрядность) сумматора 18. Текущее значение содержимого третьего делителя 10 п определяется как
Пз зд„+Пг,(6)
где Uj- - количество поступивших в
делитель импульсов до момента переполнения сумматора 18.
Переполнение сумматора произойдет при условии
М Пэ+Пс.(7)
Подставляя в (7) значения п и п- и учитывая (3), получим
55
или
п N,2К.,Т,
(8)
1
Тк
-)
(9)
Обозначая ,
получим
(I2К,
-) Т,
(10)
Следовательно, вычитае У1ый из Т у временный интервал Т изменяется одновременно с изменением коэффициента К ,, и имеет малую дискретность, соизмеримую с дискретностью измене- ния периодов эталонной частоты. В момент переполнения су1чматора 18 оДновибратор 20 коротким импульсом с расыйает. содержимое реверсивного счетчика 21. Если теку1ций период изм ранной частоты Т больше временного И1 тервала Тр , то в реверсивный .сЧетчик 2 в период записы- вйется информдция, а в основное вре- мЛ до прихода следзтащего импульса измеренной частоты считывается. В момент обнуления реверсивного счетчика при считывании предварите-пьно записанной в него информации формирует сй сигнал измеренной скорректирован- ной частоты , который подается на второй вход фазового компаратора 6 о При записи информации через вход прямого счета на реверсивный счетчик 21 постзшает с выхода первого элемен та И 11 частота fp, т.е происходит счет импульсов f, приходящих за время ;ЛТ. При считывании информации через вход обратного C4eta на реверсивный счетчик через третий элемент И 16 поступает частота в К раз ниже Благодаря этому обнуление реверсивно го счетчика 21 происходит через вре мя, равное ,(ЛТ. Следовательно, происходит расширение разности ДТ в К
V, раз.
Кроме того, интервал Т при будет равен . Действительно, при , имеем ДТ Тэ-То. В этом случае согласно выражению (10
,
2К. I Следовательно,
т„,к,лт
Тэ
Таким образом электропривод имеет повышенную точность настройки своей динамики с частотным датчиком, требует меньше времени для этой настройки, отличается простотой настройки благодаря тому, что имеет уменьшене 0 5 о
5
ную дискретность изменения коэффициента настройки пропорциональной составляющей регулятора электропривода, уменьшенную дискретность временного интервала, вычитаемого из периодов измеренной частоты, не содержит аналоговых элементов,, а установка необходимого вычитаемого временного интервала происходит одновременно с изменением коэффициента пропорциональной составляющей. Формула изобретения
Электропривод, содержащий электродвигатель с частотным датчиком скорости, задатчик, генератор импульсов, выход которого через последовательно соединенные первый управляв- гфш делитель частоты, фазовый компаратор и силовой ключ подключен к якорной обмотке электродвигателя, логический элемент И, одновибратор, второй делитель частоты, вход которого через формирователь импульсов подключен к выходу частотного датчика скорости, а выход - к входу начальной установки третьего управляемого делителя частоты, о тличающий- с я тем, что, с целью повышения точности, упрощения и уменьшения времени настройки динамических .характеристик, в него введены второй за- датчик, четвертый и пятый управляемые делители частоты, сумматор, счетчик, реверсивный счетчик, два логи
ческих элемента И, логический элемент НЕ, выход генератора импульсов подключен к первому входу первого логического элемента И и счетным входам третьего, четвертого и пятого управляемых делителей частоты, выход первого управляемого делителя частоты соединен с его входом управления на- чальной установкой, входы задания кодов начальной установки первого,, третьего и четвертого управляемых делителей частоты подключены к выходу первого задатчика, выход второго задатчика соединен с входом задания кода начальной установки пятого управляемого делителя частоты, входом управления начальной установки соединенным с его выходом, первым входом второго логического элемента И и первым входом третьего логического элемента И, вход управления начальной установкой четвертого управляемого делителя частоты подключен
к выходу второго делителя частоты и входу начальной установки счетчика, счетным входом подключенного к выходу второго логического элемента И, второй вход которого соединен с выходом четвертого управляемого делителя частоты, выходы третьего управляемого делителя частоты и счетчика соединены соответственно с первым и вторым входами сумматора, выходом подключенного к второму входу первого логического элемента И, входу
логического элемента НЕ и одновиб- ратора, выходом соединеннного с входом начальной .установки реверсивного счетчика, вход прямого счета которого подключен к выходу первого логического элемента И, вход обратного счета соединен с выходом третьего логического элемента И, вторым входом соединенного с выходом логического элемента НЕ, выход реверсивного счетчика подключен к второму входу фазового компаратора.
