Известные геодезические нивелиры-автоматы на сельсинах, содержащие маятниковый или гироскопический датчик, интегрирующие счетно-решающее устройство, лентопротяжный механизм, светопишущий валик и отсчитывающий механизм, не обеспечивают необходимой точности нри определении высот и постоянства горизонтального масштаба профиля, так как лента, на которой пищется профиль, перемещается пропорционально пройденному пути, что приводит к непостоянству горизонтального масщтаба.
В предлагаемом нивелире-автомате механизм передачи для перемещения ленты-и отсчитывающего устройства выполнен в виде сельсинной электрической связи. Это обеспечивает повыщение точности и постоянство горизонтального масщтаба профили, улучщая качество записи.
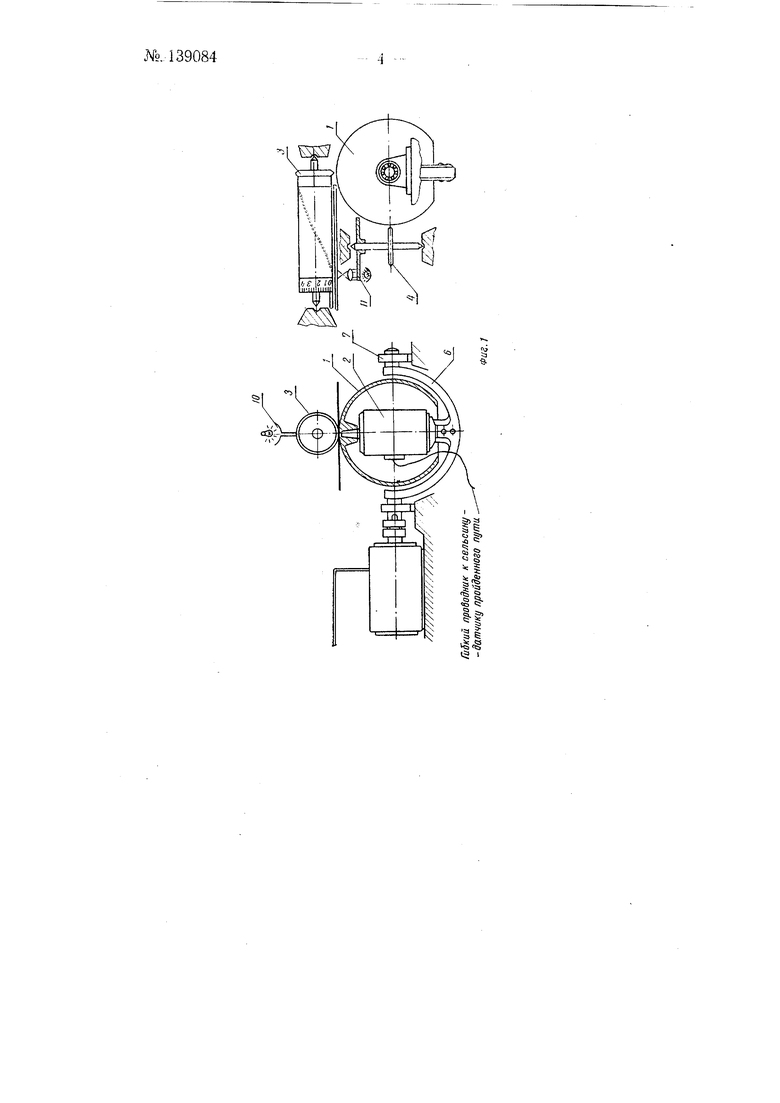
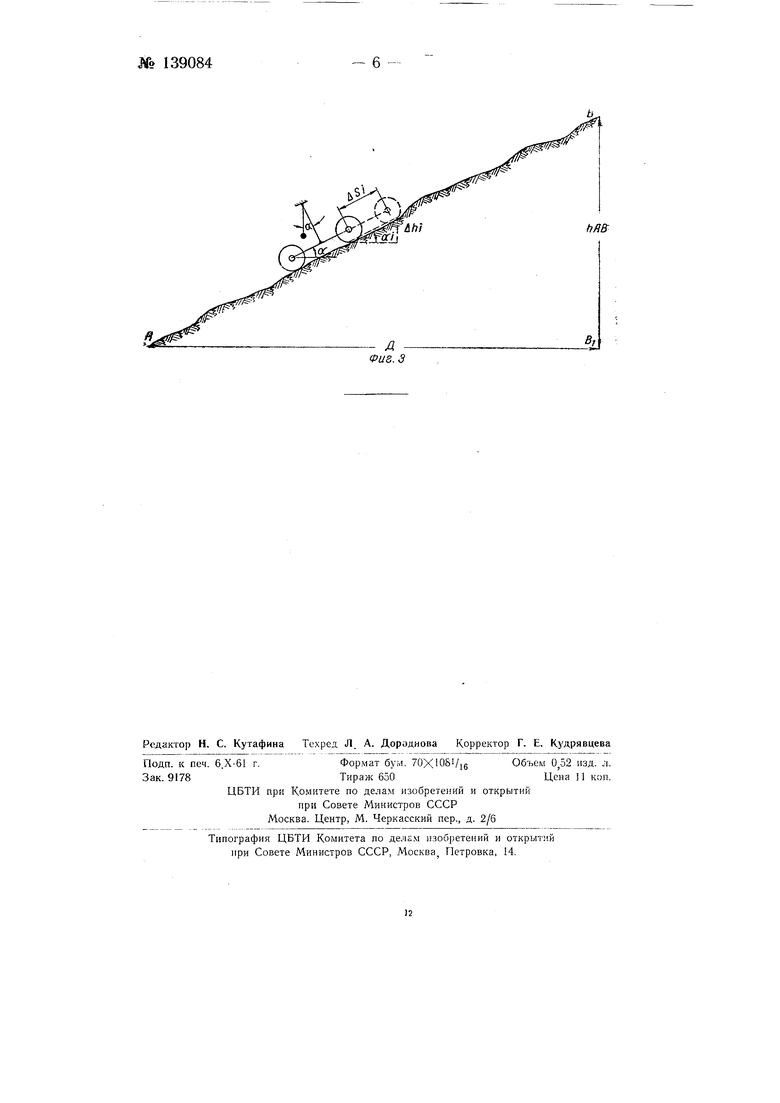
На фиг. 1 изображена в двух проекциях конструкция интегрирующего счетно-рещающего устройства; на фиг. 2 - исполнительные механизмы движения ленты и системы отсчета; на фиг. 3 - схематическое изображение исследуемого участка местности.
Интегрирующее счетно-рещающее устройство, служащее для получения превыщений и горизонтальных проложений пройденного пути, содержит пустотелый щар /, насаженный на вал ротора сельсина-приемника 2, обороты которого пропорциональны пройденному пути, а также счетный ролик 3 превыщений и счетный ролик 4 горизонтальных расстояний. Сельсин-датчик 5 следящей системы пройденного пути связан с колесом экипажа. Корпус сельсина-приемника 2 жестко связан с вилкой 6, опирающейся на щарикоподшипники 7, расположенные на горизонтальной оси, проходящей через центр щара /, и перпендикулярной направлению движения экипажа. Одна из цацф вилки 6 проходит чергз внутреннее кольцо подщипника и посредством жесткой муфты связана с ротором сельсина-приемйика 8 следящей системы механизма гировертикали. Следовательно, ось вращения ротора сельсина-приемника 2
№ i 39084- 2 -следящего механизма пройденного пути постоянно находится в отвесном положении.
При горизонтальном полол ении рамы экипажа счетный ролик 3 находится на оси вращения шара /. Ролик же 4 при этом касается шара, обегая на шаре окружность радиусом R. Обороты ролика 3 определяются радиусом обегаемой им окружности на шаре и зависят от угла наклона а. Радиус окружности ролика 3 R---R-s na.
Если обозначить радиусы роликов . и 4 через г, обороты ролика через «1, ролика 4 - п, обороты шара , то
«, ., ,, R .
Ж - 7
Обороты шара / представляют собой пройденный наклонный путь 5, а обороты ролика 3 - превышение h.
Механизм, онределяющий превышение, будет показывать высоты пройденного пути
sina
Суммируя элементарные превышения, например, на участке АВ, находят превышение точки В над точкой А:
тт
лв- A/ii 2. ,
11
где т - число отрезков Д5г на участке АВ . При AS -- О hAB в
- s na-dS - интегральное вырах :ение высоты, определяемое счетно Арешающим устройством.
Число оборотов ролика 4, определяющее горизонтальное проложение пройденного пути:
п.. 2--R R .,п п
-гу- - «2 о R /i -cosa.
Тогда nz N---- cosa и горизонтальноепроложение Д /С-5 cosa, где
А1 и Л ., - масштабы соответственно наклонного
AIг
пути S и превышения h.
Отметки высот автоматически регистрируются на фотоленте, не указанной на чертеже, через каждые 100 м горизонтального проложения. При этом одновременно фиксируют и величину самого горизонтального проложения. Датчиком, задающим положение отвесной линии, является либо гироскоп, либо маятник, не изображенные на чертеже. Профиль записывается на фотоленте с помощью светопишущего валика 9, выполненного в виде цилиндра с диаметрально просверленными отверстиями. Над светопищущим валиком 9 установлен осветитель 10, свет от которого проходит через одно из отверстий в цилиндре, в зависимости от угла поворота валика, и падает на фотопленку, размещенную под валиком.
В результате движения фотопленки и поворота валика 9 на ней образуется прерывистая наклонная линия, изображающая в масштабе профиль местности. По желанию оператора нажатием кнопки отметка может быть зафиксирована в любой точке профиля, но не чаще, чем через 0,5 сек. времени, необходимого для зарядки конденсаторов осветителя 10.
Механизм передачи для перемещения фотолеиты и отсчнгывающего чстройства 11 выполнен в виде сельсигиюй электрической связи, пере ающей движение от счетных роликов 3, 4 интегрирующего счетнорешающего устройства. Перемотка пленки лентопротяжного механизма производится из кассеты в кассету. Освещение фотопленки осуществляется с помощью импульсных ламп со скоростью 5, сек. Ленга движется пропорционально горизонтальному проложению пройденного пути, благодаря чему горизонтальный масштаб всегда постоянен.
Предмет изобретения
Геодезический нивелир-автомат на сельсинах, содержащий маятниковый или гироскопический датчик, интегрирующее счетно-решающее устройство, лентопротяжный механизм, светопищущий валик и отсчитывающий механизм, отличающийся тем, что, с целью повыщения точности и постоянства горизонтального масщтаба профиля, в нем механизм передачи для перемещения ленты и отсчитывающего устройства выполнен в виде сельсииной электрической связи, передающей движение от счетных роликов интегрирующего счетно-решающего устройства.
- 3 -.NO 139084.
5)
N
со
5j
9hRB

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство регистрации параметров движения маневровых локомотивов | 1961 |
|
SU145076A1 |
| Автоматический прибор для съемки плана и профиля пройденного пути | 1933 |
|
SU42702A1 |
| Нивелир-автомат | 1950 |
|
SU93851A1 |
| ТЕОДОЛИТ БЕЗ ЛИМБА И АЛИДАДЫ | 1928 |
|
SU22278A1 |
| Панорамный стереофотоаппарат | 1987 |
|
SU1493977A1 |
| Прибор для записи профиля пройденного пути | 1951 |
|
SU97433A1 |
| Прибор для автоматической записи профиля забоя при драгировании | 1980 |
|
SU960381A1 |
| Прибор для записи профиля трассы по стереомодели | 1960 |
|
SU140994A1 |
| Прибор для прокладывания на карте пройденного пути | 1932 |
|
SU49853A1 |
| НИВЕЛИР-АВТОМАТ | 1971 |
|
SU295974A1 |