Изобретение относится к горной технике и может быть использовано при добыче полезных ископаемых драгами. . Известен прибор для автоматической зарисовки профиля забоя при драгировании, который содержит датчики глубины черпания и угла поворота драги, связанные, посредством сельсиновых передач d двухкобрдинатным регистратором. Сельсин-приемник датчика глубины черпания через электронный усилитель и исполнительный двига тель соединен с лентопротяжным механизмом регистратора, а сельсин-прием ник датчика ширины забоя также через электронный усилитель и исполнительный двигатель соединен с записывающе головкой регистратора. По мере опускания черпаковой рамы диаграммная бумага протягивается на величину, пропорциональную заглублению, а запй сывающая головка перемещается по шка ле регистратора пропорционально углу маневрирования драги 1 j . Недостатком данного прибора явля ется то, что 11П1рина забоя, измеряема величиной.угла поворота драги, соответствует длине дуги, описываемой нижним черпаковым барабаном, в то вр мя 1.Й;-действительной шириной забоя являЕётёя не дуга, а хорда ее замыкающая. Для вычисления действительной ширины забоя необходимо производить пересчет показаний регистратора, что снижает точность измерения и составляет определенные неудобства в обслуживании. .Аналогичная ситуация характерна для измерителя глубины черпания. Известно также устройство для автоматической записи профиля эабоя при драгировании. Устройство содержит измеритель координаты, включающий датчик одной координаты, связанный через сельсинную передачу с регистратором координаты и компенсатор нелинейности в виде каретки с направляющими, на которых подвижно установлен ролик со следящим рычагом, жестко связанный с валом сельсин-приемника, причем каретка жестко укреплена на гибком тросе, натянутом на блоках и запасованном на шкиве, насаженном на вал исполнительного двигателя регистратора. . .Применение компенсатора нелинейности позволяет фиксировать действительную глубину забоя, т.е. переводить синусную характеристику датчика п линейную. Данное устройство может
быть использовано для измерения любого параметра, датчик которого имеет синусную -характеристику выхода, например, измерения ширины дражного забоя по углу поворота драги. При этом, с помощьюкомпенсатора нелинвйности, ,цлина дуги, измеряемая в угла поворота драги, преобразуется в действительную ширину забоя (хорду дуги) Х2. .
Однако по мере опускания черпаковой рамы горизонтальная проекция ее, являющаяся частью радиуса драгирования, уменыиается по закону синуса, что не учитывается датчиком угла поворота, фиксирующим только величину угла. В результате при повороте на , один и тот же угол, при различной глубине черпания, запись ширины забоя происходит одинаковая, время как действительная ширина выработки при этом различная.
Целью изобретения является повышение точности измерения.
Указанная цель достигается тем, что прибор, снабжен дополнительным измерителем координаты с датчиком ддоугрй координаты и компенсатором нелинейности,.следящий рычагкоторого выполнен телескопическим б виде стержня, вставленного в трубку, а на вгш сельсин-приемника дополнительного измерителя координаты .насажена трубка, /связанная со шкивом, компенсатора нелинейности основного измерителя координаты, и через шарнир - с трубкой телескопического следящего рлчага, жестко соединенной с роликом.
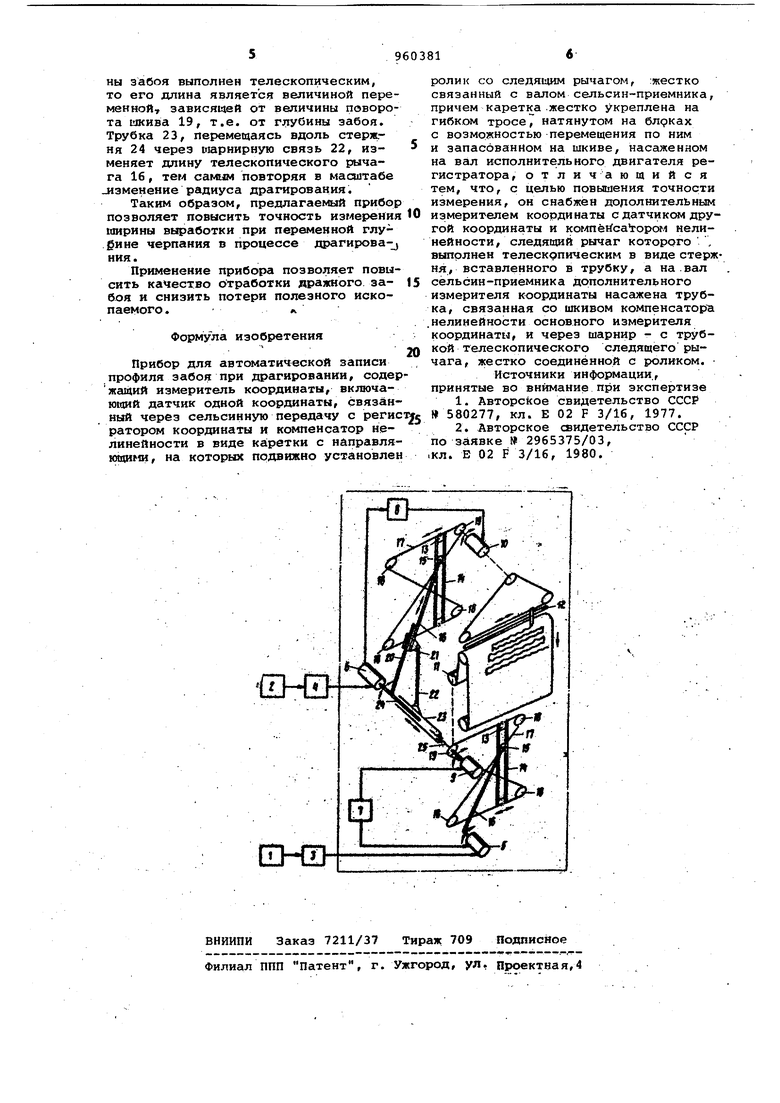
На чертеже представлена блок-схема предлагаемого устройства.
Прибор содержит датчик 1 глубинь черпания и датчик 2 угла поворота драги| связанные через сельсинные передачи, включающие сельсин-датчики 3 и 4 и сельсин-приемники 5 и 6 с электронными усилителями 7 и 8, соединенные с исполмительнырии двигателя ми 9 и 10. Двигатель 9 связан с лентопротяжн1«л механизмом 11 измерителя глубины черпания, а двигатель 10 с записывающее, головкой 12 измерителя ширины дражного забоя. Каждый измеритель снабжен своим компенсатором нелинейности, включающим каретку 13 с направлякоцими 14, на которых подвижно установлен ролик 15 со следящим рычагом 16. Каретка жестко укреплена на гибком тросе 17, натянутом на блоках 18, с возможностью перемещения по ним и эапасованном на 19. Шкивы обоих компенсаторов насажены на вгшы исполнительных реверсивных двигателей 9 и 10.
Следящий рычаг 16 компенсатора нелинейности измерителя глубины жестко связан с валом сельсин-приемника 5 таким образом, что при перемещенаях каретки 13, следящий рычаг 16 поворачивает вал сельси17-приемнйка 5.
Следящий рычаг 16 компенсатора нелинейности измерителя гшрины выполнен телескопическим в виде стержня 20, вставленного в трубку 21.Трубка 21 жестко связана с роликом 15 и через шарнирную связь 22 - с трубкой 23 телескопического вала, стерж нем 24 которого является удлиненный вал сельсин-приемника 6. Стержень 20 жестко связан со стержнем 24 с воз.можностью поворота последнего, при перемещениях каретки 13. Трубка 23 через соединение винт-гайка 25 соединена со шкивом 19 компенсатора нелинейности измерителя глубины забоя.
Прибор раб.отает следующда образом.
При драгировании забоя драга маневрирует в пределах заданного угла отработки, постепенно от слоя к слою заглубляя черпаковую раму в грунт. Движения ее в плоской системе координат непрерывно записываются в определенно масштабе на диаграммной бумаге двухкоординатного регистратора планшетного типа с помощью взаимосвязи следуЮщих устройств. Сигналы от датчиков 1 глубины черпания и угла поворота драги 2 поступгиот через сельскнные передачи 3-5 и 4-6 на вход электронных усилителей 7-8 и отрабатываются реверсивными двигателями 9 и 10. Двигател 9 измерителя глубины одновременно с отработкой сигнала протягивает диаграммную ленту лентопротяжного механизма 11, поворачивает шкив 19 своего компенсатора нелинейности и вращает винт соединения 25,перемещая трубку телескопического вала 23.
Двигатель 40 измерителя ширины одновременно с отработкой сигнала передвигает записывающую головку 12 и поворачивает шкив 19 своегЬ компенсантора нелинейности.
Поворот шкивов 19 вызывает перемещение 13 и роликов 15 по направляющим 14. За счет поперечной жесткости следящих рычагов 16 эти перемещения преобразуются в поворот вала роторов сельсин приемников 5 и 6, направленного в сторону компенсации разбаланса, вызванного поворотом ротора сельсиндатчиков 3 и 4.
Таким образом, в компенсаторах нелинейности автоматически осуществляется пересчет дуги измеряемого параметра (в Обоих каналах измерения угол поворота ротора сельсин-датчик6в В ее хорду) Т;е. действительные глубину «и ширину забоя.
При этом изменяя диаметр шкивов 19 и длину следящих рычагов 16, возможно регулир1овать масштаб фиксируемых величин (т.е. глубины и ширины I забоя).
Так .как следящий рычаг 16 компенсатора нелинейности измерителя шири
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения глубины черпания дражного забоя | 1980 |
|
SU937621A1 |
| Устройство для определения глубинычЕРпАНия дРАжНОгО зАбОя | 1979 |
|
SU804768A1 |
| Прибор для автоматической зарисовки профиля забоя при драгировании | 1977 |
|
SU732451A1 |
| Прибор для автоматической зарисовки профиля забоя при драгировании | 1980 |
|
SU874887A1 |
| Дражное комплексное устройство | 1979 |
|
SU817154A1 |
| Прибор для автоматической зарисовки профиля забоя при драпировании | 1975 |
|
SU580277A1 |
| Устройство для определения глубины опускания черпаковой рамы | 1990 |
|
SU1784719A1 |
| Устройство для определения положения драги в забсе | 1977 |
|
SU594252A2 |
| Способ автоматического поддержанияОпТиМАльНОгО ОТНОшЕНия лиНЕйНыХСКОРОСТЕй бОКОВОгО пЕРЕМЕщЕНияи чЕРпАКОВОй цЕпи дРАги | 1979 |
|
SU798236A1 |
| Способ дражной разработки техногенных запасов | 2019 |
|
RU2700152C1 |
