Изобретение относится к машиностроению и может быть использовано на различных видах транспорта, а также в механизмах, где необходима плавная регулировка скорости вращения валов.
Известна инерционная передача (А.С. №1317211 F16H 25/00, 33/06, 1985), более сложная конструкция, чем предлагаемая.
Известна бесступенчатая передача Хоббса (Леонов А.И., Инерционные автоматические трансформаторы вращающего момента, М.: Машиностроение, 1978, стр.11, рис 2), которая содержит в конструкции механизм свободного хода, малая долговечность которого является недостатком.
Наиболее близким техническим решением, выбранным в качестве прототипа, является центробежный вариатор (журнал «Техника молодежи» №12, 1977, стр.39), содержащий ведущий вал, который несет на себе ступицу с подвижными в радиальном направлении роликами. Они обкатываются по внутренней поверхности обоймы, имеющей профиль, близкий к эллипсному. Эта обойма играет роль ведомого звена. При вращении ведущего вала ролики движутся в радиальном направлении от оси вала и, обкатываясь по внутренней поверхности обоймы, создают момент, прокручивающий обойму в сторону вращения вала. Недостатком данной конструкции является то, что с увеличением скорости вращения обоймы возникает противодействующей момент и падает КПД вариатора.
Технический результат, достигаемый в заявленном изобретении, заключается в повышении КПД вариатора.
Указанный технический результат достигается тем, что автоматический центробежно-инерционный вариатор содержит ведущий вал, на ступице которого установлены подвесы с профилированной поверхностью с роликами, которые имеют возможность взаимодействовать с внутренней профилированной поверхностью обоймы, выполняющей роль ведомого звена, а опорные ролики, установленные на обойме, на линии минимального радиуса профилированной поверхности, имеют возможность обкатывать профилированную поверхность подвесов. Участки внутренней профилированной поверхности обоймы, соответствующие увеличению радиуса вращения роликов, и начальные участки профилированной поверхности подвесов, соответствующие уменьшению радиуса вращения роликов, выполнены из эластичного материала.
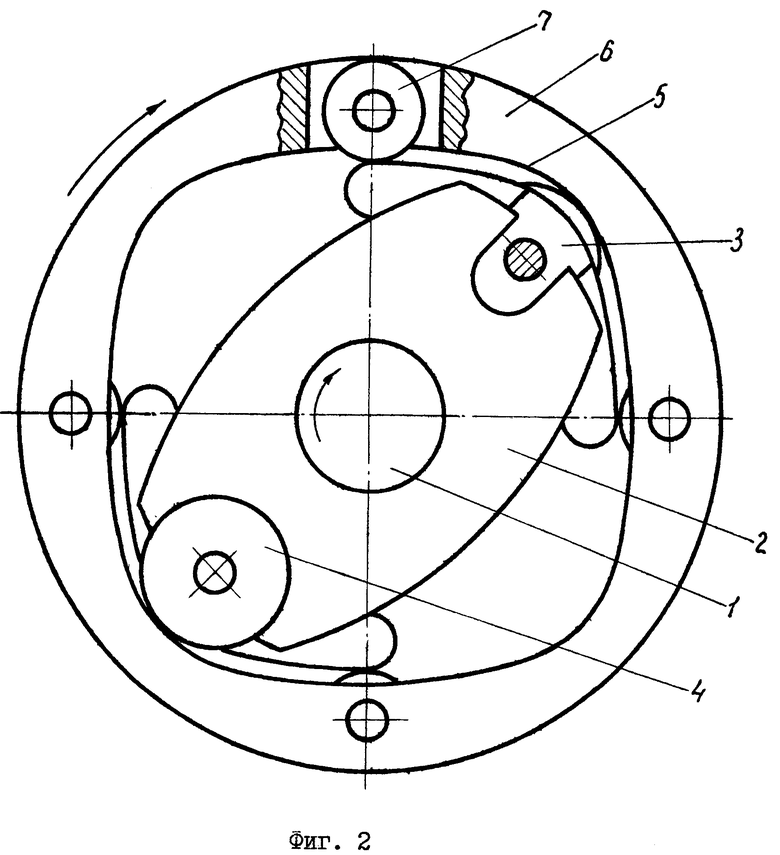
На фиг.1 представлен автоматический центробежно-инерционный вариатор с подвесами, совершающими колебательные движения вокруг осей крепления их к ступице; на фиг.2 - то же, но подвесы перемещаются в радиальном направлении.
Автоматический центробежно-инерционный вариатор содержит ведущий вал 1, на ступице 2 которого установлены подвесы с профилированной поверхностью 3 с роликами 4, которые имеют возможность взаимодействовать с профилированной поверхностью 5 обоймы 6, а опорные ролики 7 имеют возможность обкатывать профилированную поверхность подвесов 3. По конструктивным соображениям на каждом подвесе 3 установлено по два ролика 4.
Автоматический центробежно-инерционный вариатор работает следующим образом. Ведущий вал 1 начинает вращаться. Ролики 4 под действием центробежных сил отклоняются на подвесах 3 от центра вариатора и начинают обкатывать участки профилированной поверхности 5, уменьшающие радиус вращения роликов 4, и создают, на обойме 6 движущий момент Мд.
Мд=Fц×r×sinά, где
Fц - центробежная сила от массы роликов 4 и подвесов 3;
ά - значение угла наклона траектории движения центра массы роликов 4 к окружностям, проходящим через центры масс роликов 4;
r - значение радиуса движения центра масс роликов 4.
При движении роликов 4 по участкам профилированной поверхности 5, увеличивающих радиус вращения роликов, линейная скорость роликов 4 возрастает от Vp min до Vp max и от ведущего вала 1 отнимается работа, равная изменению кинематической энергии роликов 4 на этих участках. При движении роликов 4 по участкам, где радиус вращения роликов 4 уменьшается, одновременно уменьшается линейная скорость движения роликов от Vp max до Vp min, т.е. скорость движения тормозится профильной поверхностью 5 обоймы 6 и ведущим валом 1.
Таким образом, при неподвижной обойме 6 кинетическая энергия, полученная роликами 4 на участках разгона, возвращается ведущему валу 1, кроме потерь на трение в подшипниках роликов и подвесов и трения роликов 4 при качении. Во время торможения роликов 4 обойме 6 передается импульс силы
Fи×Δt=м×ΔV, где
Fи- сила инерции роликов 4;
Δt - время изменения скорости роликов 4 от Vp max до Vp min;
м - масса роликов 4 (включает в себя массу подвеса, приведенную к центру ролика);
ΔV - разность Vp max - Vp min.
Под действием силы инерции Fи на обойме 6 развивается движущий момент инерции Ми
Ми=Fи×rcр, где
rcр - среднее значение радиуса движения центра масс роликов 4 на участке уменьшения радиуса вращения роликов 4.
При работе вариатора в режиме трансформации момента общий движущий момент (М2) равен сумме моментов
М2=Мд+Ми
Когда момент сопротивления нагрузки Мн на ведомой обойме 6 становится меньше общего движущего момента М2(М2>Мн), создаваемого роликами 4 на профилированной поверхности 5, ведомая обойма 6 начинает вращаться под действием разности этих моментов.
По мере увеличения частоты вращения ведомой обоймы 6 (ώ2) уменьшается частота колебаний роликов 4, пропорциональная разности частот вращения ведущего вала 1 (ώ1) и ведомой обоймы 6 (ώ2).
Δώ=ώ1-ώ2,
а часть кинетической энергии роликов 4 передается ведомой обойме 6 и момент сопротивления на ведущем валу 1 возрастает, что вызывает уменьшение общего движущего момента М2 (ώ2). Когда момент сопротивления нагрузки на ведомой обойме 6 Мн достигает значения Мд или станет меньше его
Мн≤Мд
происходит синхронизация вращения ведомой обоймы 6 с ведущим валом 1 (ώ1=ώ2, Δώ=0). Теперь вариатор работает как упругоцентробежная муфта. В этом положении ролики 4 располагаются на профилированной поверхности 5 так, что создают максимальный движущий момент.
Таким образом, скорость вращения обоймы 6 может меняться от нулевой до скорости ведущего вала 1 в зависимости от ее нагрузки, т.е. изменение угловой скорости ведомого вала автоматически приводит к изменению передаваемого крутящего момента.
При переходе роликов 4 на участки обоймы увеличивающие радиус вращения роликов, происходит контакт и начинается обкатывание профилированных поверхностей подвесов 3 опорными роликами 7 и усилие от центробежных сил передается в радиальном направлении через опорные ролики 7 на обойму 6, а ролики 4 обкатывают профилированную поверхность 5, выполненную из эластичного материала, практически не оказывая на нее давления, а только регулируя скорость вращения роликов 4.
Противодействующего момента на обойме 6 не создается, механизма свободного хода не требуется, а КПД вариатора повышается.
Форма профилированной поверхности подвесов 3 обеспечивает необходимое перемещение роликов 4 по участкам профилированной поверхности 5, соответствующим увеличению их радиуса вращения, а также обеспечивает равные скорости вращения опорных роликов 7 в начале и конце контакта их с подвесами 3.
Для получения мягкого контакта профилированных поверхностей подвесов 3 с опорными роликами 7 и регулирования их скорости вращения начальные участки профилированных поверхностей подвесов 3, соответствующие уменьшению радиуса вращения роликов 4, выполнены из эластичного материала.
Участки профилированной поверхности 5, увеличивающие и уменьшающие радиус вращения роликов 4, могут быть одной длины, а может быть одинаковым время прохождения этих участков роликами 4.
При увеличении радиуса вращения роликов 4 для обеспечения постоянного контакта профилированной поверхности подвесов 3 с опорными роликами 7 время отклонения роликов 4 от минимального до максимального расстояния от центра вариатора при максимальной разности оборотов ведущего вала 1 и ведомой обоймы 6 не должно быть больше времени перемещения роликов 4 в окружном направлении по участкам профилированной поверхности 5, увеличивающим радиус вращения роликов 4. Установкой на общей обойме нескольких вариаторов, сдвинутых по фазе в окружном направлении, уменьшаем величину пульсации суммарного вращающего момента.
Для обеспечения равномерного вращения ведомого вала устанавливается маховик, функцию которого частично выполняет обойма.
Для обеспечения заднего хода автомобиля на ведомом валу обоймы 6 устанавливают реверсивное устройство, выполненное по классической схеме (не являющееся объектом изобретения, поэтому описание его опускается).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИЛОВАЯ ПЕРЕДАЧА | 2014 |
|
RU2558414C2 |
| ЦЕНТРОБЕЖНО-ИНЕРЦИОННЫЙ ВАРИАТОР | 2005 |
|
RU2287102C1 |
| Центробежно-инерционный вариатор | 2017 |
|
RU2662309C1 |
| Силовая передача | 1986 |
|
SU1391976A1 |
| Силовая передача | 1984 |
|
SU1238985A1 |
| ИНЕРЦИОННЫЙ ИМПУЛЬСНЫЙ ВАРИАТОР | 1991 |
|
RU2016293C1 |
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2000 |
|
RU2179674C2 |
| Инерционный импульсный рекуперативный тормоз | 1984 |
|
SU1275165A1 |
| АВТОМОБИЛЬНЫЙ ВАРИАТОР | 1997 |
|
RU2127382C1 |
| ИНЕРЦИОННЫЙ ВАРИАТОР | 2001 |
|
RU2199043C2 |
Изобретение относится к машиностроению и может быть использовано на различных видах транспорта, а также в механизмах, где необходима плавная регулировка скорости вращения валов. Автоматический центробежно-инерционный вариатор содержит ведущий вал, на ступице которого установлены подвесы с профилированной поверхностью с роликами, опорные ролики и обойму, также выполненную с профилированной поверхностью. Ролики имеют возможность взаимодействовать с внутренней профилированной поверхностью обоймы, выполняющей роль ведомого звена. Опорные ролики, установленные на обойме, имеют возможность обкатывать профилированную поверхность подвесов. Участки внутренней профилированной поверхности обоймы, соответствующие увеличению радиуса вращения роликов, и начальные участки профилированной поверхности подвесов, соответствующие уменьшению радиуса вращения роликов, могут быть выполнены из эластичного материала. Решение направлено на повышение КПД вариатора. 4 з.п. ф-лы, 2 ил.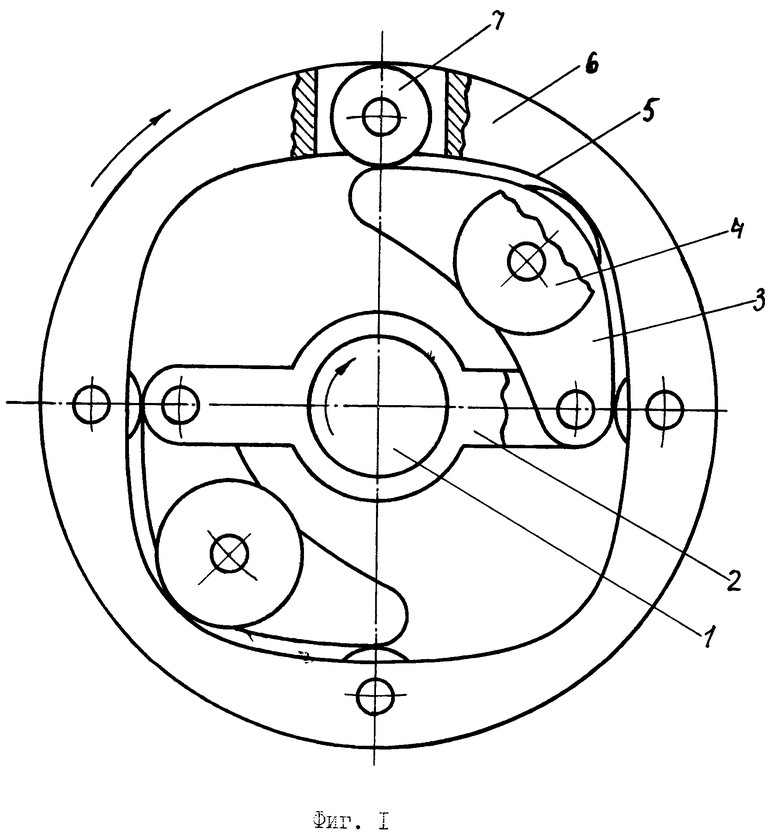
1. Автоматический центробежно-инерционный вариатор, содержащий ведущий вал, на ступице которого установлены подвижные в радиальном направлении ролики, которые имеют возможность взаимодействовать с внутренней профилированной поверхностью обоймы, выполняющей роль ведомого звена, отличающийся тем, что на обойме установлены опорные ролики, а ролики, взаимодействующие с внутренней профилированной поверхностью обоймы, установлены на подвесах с профилированной поверхностью, смонтированных на ступице ведущего вала, а опорные ролики имеют возможность обкатывать профилированную поверхность подвесов.
2. Вариатор по п.1, отличающийся тем, что подвесы с профилированной поверхностью с установленными на них роликами, взаимодействующими с внутренней профилированной поверхностью обоймы, смонтированы на ступице ведущего вала с возможностью совершать колебательные движения вокруг осей крепления их к ступице.
3. Вариатор по п.1, отличающийся тем, что подвесы с профилированной поверхностью с установленными на них роликами, взаимодействующими с внутренней профилированной поверхностью обоймы, смонтированы на ступице с возможностью перемещения в радиальном направлении.
4. Вариатор по пп.1, 2 и 3, отличающийся тем, что участки внутренней профилированной поверхности обоймы, соответствующие увеличению радиусов вращения роликов, выполнены из эластичного материала.
5. Вариатор по пп.1, 2 и 3, отличающийся тем, что начальные участки профилированных поверхностей подвесов, соответствующие уменьшению радиусов вращения роликов, выполнены из эластичного материала.
| ЦЕНТРОБЕЖНО-ИНЕРЦИОННЫЙ ВАРИАТОР | 2005 |
|
RU2287102C1 |
| WO 9946519 A1, 16.09.1999 | |||
| Способ ускоренного определения склонности к коррозионному растрескиванию алюминиевых сплавов | 1961 |
|
SU142476A1 |
| "Инерционный привод | 1976 |
|
SU605051A1 |

