Изобретение относится к машиностроению и может быть использовано на различных видах транспорта, а также в механизмах, где необходима плавная регулировка скорости вращения валов.
Наиболее близким техническим решением, выбранным в качестве прототипа, является автоматический вариатор (заявка на изобретение №2012138723 F16H 33/08, 2012), содержащий корпус, ведущий вал, на ступице которого уставлены подвесы с профилированной поверхностью с роликами, опорные ролики и разборную обойму, также выполненную с профилированной поверхностью, понижающую передачу, содержащую промежуточный вал с двумя неподвижно закрепленными зубчатыми колесами, зубчатое колесо, установленное неподвижно на ведущем валу и зубчатое колесо, установленное на обойме при помощи обгонной муфты.
Ролики имеют возможность взаимодействовать с внутренней профилированной поверхностью обоймы, выполняющей роль ведомого звена. Опорные ролики, установленные на обойме, имеют возможность обкатывать профилированную поверхность подвесов. Зубчатое колесо, установленное на ведущем валу, взаимодействует с одним из двух зубчатых колес, закрепленных на промежуточном валу, установленном на корпусе, а второе зубчатое колесо взаимодействует с зубчатым колесом, установленным на обойме при помощи обгонной муфты. Участки внутренней профилированной поверхности обоймы, соответствующие увеличению радиуса вращения роликов, выполнены из эластичного материала.
При вращении ведущего вала крутящий момент от него на обойму передается двумя потоками. Первый поток получается от роликов, движущихся в радиальном направлении и обкатывающих внутреннюю профилированную поверхность обоймы. Второй поток передается обойме через зубчатые соединения понижающей передачи. С увеличением скорости вращения ведущего вала доля второго потока в общем крутящем моменте падает до нуля и зубчатые соединения продолжают вращаться без нагрузки.
Недостатком данной конструкции является нахождение в постоянном вращении зубчатых соединений понижающей передачи.
Технический результат, достигаемый в заявленном изобретении, заключается в устранении находящихся в постоянном вращении зубчатых соединений понижающей передачи и повышении инерционных показателей силовой передачи.
Указанный технический результат достигается тем, что автоматическая силовая передача содержит корпус, ведущий вал, на ступице которого установлены подвесы с профилированной поверхностью с роликами, опорные ролики и разборную обойму, также выполненную с профилированной поверхностью, планетарную передачу, содержащую солнечное колесо, установленное на ведущем валу, сателлиты, установленные на обойме и опорную шестерню, установленную на корпусе при помощи механизма свободного хода.
Ролики имеют возможность взаимодействовать с внутренней профилированной поверхностью обоймы, выполняющей роль ведомого звена. Опорные ролики, установленные на обойме, имеют возможность обкатывать профилированную поверхность подвесов. Солнечное колесо входит в зацепление с сателлитами, а сателлиты с опорной шестерней. Участки внутренней профилированной поверхности обоймы, соответствующие увеличению радиуса вращения роликов, выполнены из эластичного материала.
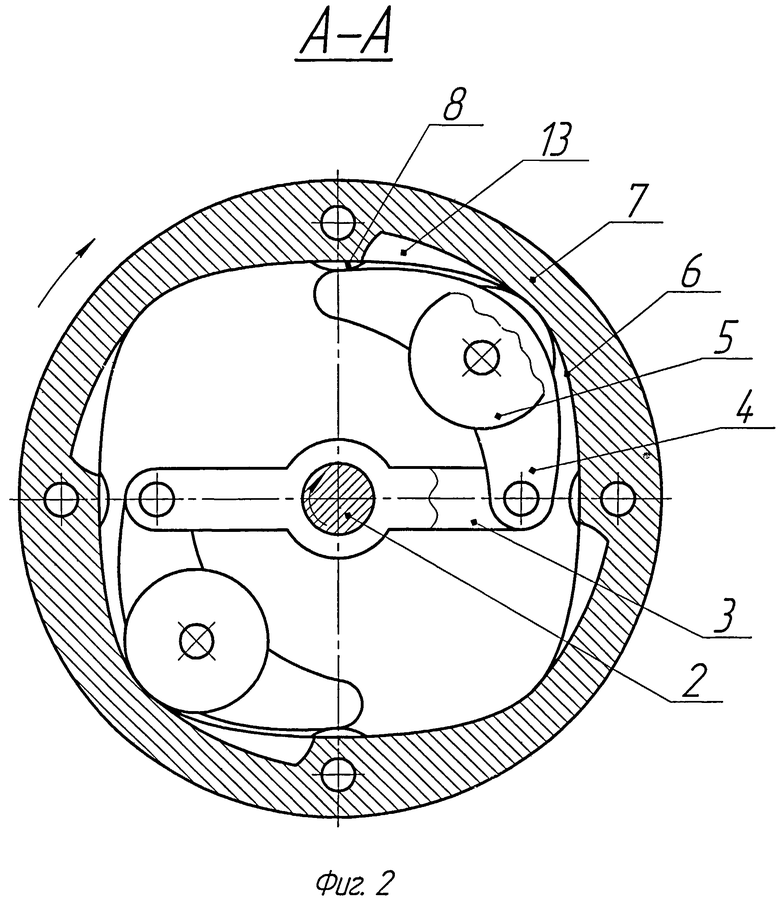
На Фиг. 1 изображена автоматическая силовая передача (разьемы корпуса не показаны); на Фиг. 2 - разрез по А-А на Фиг. 1.
Автоматическая силовая передача содержит корпус 1, ведущий вал 2, на ступице 3 которого установлены подвесы с профилированной поверхностью 4 с роликами 5, которые имеют возможность взаимодействовать с профилированной поверхностью 6 разборной обоймы 7, а опорные ролики 8 имеют возможность обкатывать профилированную поверхность подвесов 4. На ведущем валу 2 установлено солнечное колесо 9, которое входит в зацепление с сателлитами 10, установленными на обойме 7, а опорная шестерня 11 установлена на корпусе 1 при помощи механизма свободного хода 12 и взаимодействует с сателлитами 10. Участки 13 внутренней профилированной поверхности 6, соответствующие увеличению радиуса вращения роликов 5, выполнены из эластичного материала.
Автоматическая силовая передача работает следующим образом.
Ведущий вал 2 начинает вращаться. Крутящий момент от ведущего вала 2 передается обойме 7, выполняющей роль ведомого звена, двумя потоками, под действием которого ведомая обойма 7 начинает вращаться. Первый поток передается по цепочке: ведущий вал 2, ступица 3, подвес 4, ролик 5, обойма 7.
Ролики 5 под действием центробежных сил отклоняются на подвесах 4 от центра силовой передачи и начинают обкатывать участки профилированной поверхности 6, уменьшающие радиус вращения роликов 5, и создают на обойме 7 движущий момент Мд
Мд=Fц·r·sin α, где
Fц - центробежная сила от массы роликов 5 и подвесов 4;
α - значение угла наклона траектории движения центра массы роликов 5 к окружностям, проходящим через центры масс роликов 5;
r - значение радиуса движения центра масс роликов 5.
При движении роликов 5 по участкам профилированной поверхности 6, увеличивающих радиус вращения роликов, линейная скорость роликов 5 возрастает от Vp min до Vp max и от ведущего вала 2 отнимается работа, равная изменению кинетической энергии роликов 5 на этих участках. При движении роликов 5 по участкам, где радиус вращения роликов 5 уменьшается, одновременно уменьшается линейная скорость движения роликов от Vp max до Vp min, то есть скорость движения тормозится профилированной поверхностью 6 обоймы 7 и ведущим валом 2. Во время торможения роликов 5 обойме 7 передается импульс силы
Fи·Δt=m·ΔV, где
Fи - сила инерции роликов 5;
Δt - время изменения скорости роликов 5 от Vp max до Vp min:
m - масса роликов 5 (включает в себя массу подвесов, приведенную к центру ролика);
ΔV - разность Vp max-Vp min
Под действием силы инерции Fи на обойме 7 развивается движущий момент инерции Ми
Ми=Fи·rср, где
rср - среднее значение радиуса движения центра масс роликов 5 на участках уменьшения радиуса вращения роликов 5.
Второй поток передается по цепочке: ведущий вал 2, солнечное колесо 9, сателлиты 10, опорная шестерня 11, механизм свободного хода 12, обойма 7. Крутящий момент, передаваемый вторым потоком, будет равен крутящему моменту ведущего вала, умноженному на передаточное отношение планетарной передачи, т.е.
М7=М2·i, где
М7 - крутящий момент на обойме 7 от планетарной передачи;
М2 - крутящий момент ведущего вала 2;
i - передаточное отношение планетарной передачи.
При работе силовой передачи в режиме трансформации момента общий движущий момент (М) силовой передачи равен сумме моментов
М=Мд+Ми+М7
При увеличении скорости вращения ведущего вала происходит изменение величин крутящих моментов, составляющих общий движущий момент М. Доля крутящего момента по первому потоку увеличивается, а доля второго потока уменьшается. Когда крутящий момент по второму потоку станет равен нулю, вступает в работу механизм свободного хода, опорная шестерня начинает вращаться в направлении вращения ведущего вала, а сателлиты начинают вращаться без нагрузки. Теперь силовая передача работает как центробежно-инерционный вариатор. По мере увеличения частоты вращения ведомой обоймы 7 (ω7) увеличивается скорость вращения опорной шестерни и одновременно уменьшается скорость вращения вокруг своих осей сателлитов и уменьшается частота колебаний роликов 5, пропорциональная разности частот вращения ведущего вала 2 (ω2) и ведомой обоймы 7 (ω7)
Δω=ω2-ω7
а часть кинетической энергии роликов 5 передается ведомой обойме 7 и момент сопротивления на ведущем валу 2 возрастает, что вызывает уменьшение общего движущего момента М. Когда момент сопротивления нагрузки на ведомой обойме 7 Мн достигает значения Мд или станет меньше его
Мн≤Мд
Происходит синхронизация вращения ведомой обоймы 7 с ведущим валом 2 (ω2=ω7, Δω=0). Силовая передача работает как единое целое. Вращения зубчатых соединений не происходит. Масса планетарной передачи увеличивает инерционные показатели силовой передачи. Технический результат получен. Теперь силовая передача работает как упругоцентробежная муфта.
При переходе роликов 5 на участки обоймы увеличивающие радиус вращения роликов происходит контакт и начинается обкатывание профилированных поверхностей подвесов 4 опорными роликами 8 и усилие от центробежных сил на обойму 7 передается в радиальном направлении через опорные ролики 8, а ролики 5 обкатывают профилированные участки 13, выполненные из эластичного материала, практически не оказывая на них давления, а только регулируя скорость вращения роликов 5.
Противодействующего момента на обойме 7 не создается.
Для уменьшения величины пульсации суммарного вращающего момента необходимо устанавливать на общем валу и общей ведомой обойме несколько секций роликов, сдвинутых по фазе в окружном направлении.
Таким образом, скорость вращения обоймы 7 меняется от минимальной на понижающей передаче до скорости ведущего вала 2 в зависимости от нагрузки, т.е. изменение угловой скорости ведомого вала автоматически приводит к изменению передаваемого крутящего момента, а нагрузочные характеристики силовой передачи соответствуют эксплуатационным нагрузкам, при этом противодействующего момента на обойме не создается, а вращение зубчатых соединений зависит от режима работы силовой передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЦЕНТРОБЕЖНО-ИНЕРЦИОННЫЙ ВАРИАТОР | 2008 |
|
RU2403469C2 |
| ЦЕНТРОБЕЖНО-ИНЕРЦИОННЫЙ ВАРИАТОР | 2005 |
|
RU2287102C1 |
| Силовая передача | 1986 |
|
SU1391976A1 |
| ДИФФЕРЕНЦИАЛ БЛОКИРУЕМЫЙ | 2008 |
|
RU2407933C2 |
| Коробка передач транспортного средства | 1980 |
|
SU1044480A1 |
| ВАРИАТОР НА ОСНОВЕ ШЕСТЕРНИ ИЗМЕНЯЕМОГО ДИАМЕТРА | 2013 |
|
RU2563294C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРИВОДА КОЛЕС ИЛИ МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520224C1 |
| Планетарный вариатор скоростей с автоматическим изменением передаточного отношения | 1944 |
|
SU65442A1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
| Механизм привода задних валов отбора мощности универсально-пропашного трактора | 1990 |
|
SU1782785A1 |
Изобретение относится к машиностроению и может быть использовано на различных видах транспорта, а также в механизмах, где необходима плавная регулировка скорости вращения валов. Автоматический силовая передача содержит корпус, ведущий вал, на ступице которого установлены подвесы с профилированной поверхностью с роликами, опорные ролики и разборную обойму, также выполненную с профилированной поверхностью, планетарную передачу, содержащую солнечное колесо, установленное на ведущем валу, сателлиты, установленные на обойме, и опорную шестерню, установленную на корпусе при помощи механизма свободного хода. Ролики имеют возможность взаимодействовать с внутренней профилированной поверхностью обоймы, выполняющей роль ведомого звена. Опорные ролики, установленные на обойме, имеют возможность обкатывать профилированную поверхность подвесов. Солнечное колесо входит в зацепление с сателлитами, а сателлиты - с опорной шестерней. Участки внутренней профилированной поверхности обоймы, соответствующие увеличению радиуса вращения роликов, выполнены из эластичного материала. В результате устранены находящиеся в постоянном вращении зубчатые соединения понижающей передачи, повышаются ее инерционные показатели. 1 з.п. ф-лы, 2 ил.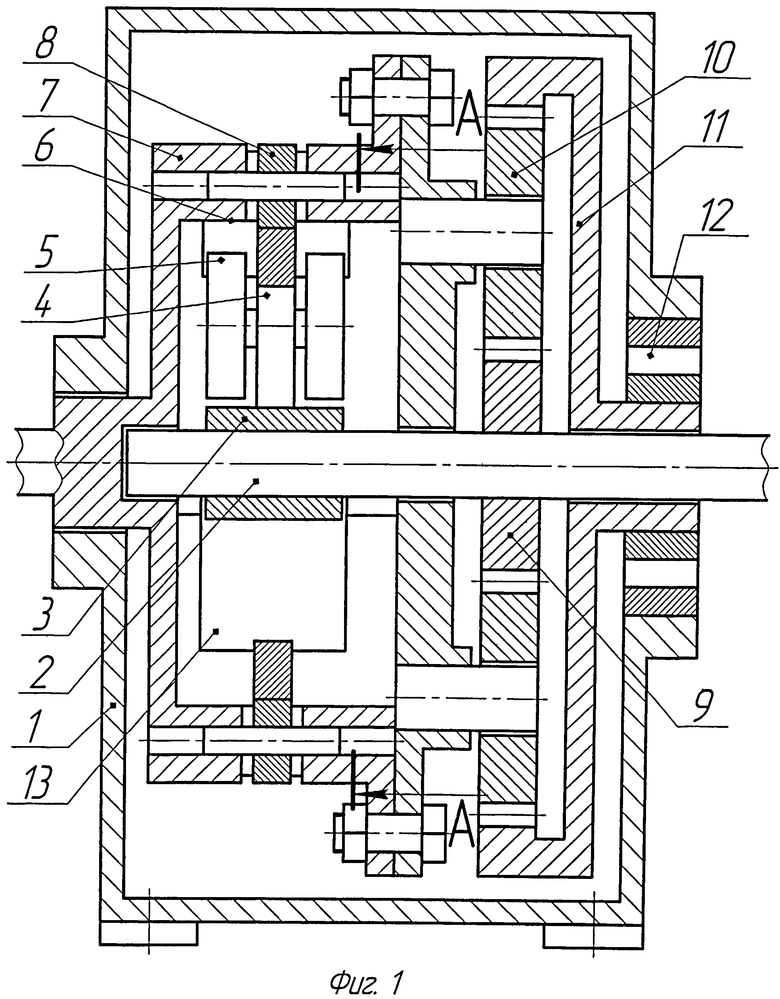
1. Автоматическая силовая передача, содержащая корпус, ведущий вал, на ступице которого установлены подвесы с профилированной поверхностью с роликами, опорные ролики и обойму, также выполненную с профилированной поверхностью, при этом ролики имеют возможность взаимодействовать с внутренней профилированной поверхностью обоймы, выполняющей роль ведомого звена, опорные ролики, установленные на обойме, имеют возможность обкатывать профилированную поверхность подвесов, а участки внутренней профилированной поверхности обоймы, соответствующие увеличению радиуса вращения роликов, выполнены из эластичного материала, отличающаяся тем, что между ведущим валом и обоймой в качестве понижающей передачи установлена планетарная передача, солнечное колесо которой смонтировано на ведущем валу, а опорная шестерня установлена на корпусе силовой передачи при помощи механизма свободного хода и может вращаться в направлении вращения ведущего вала на высоких оборотах двигателя, при этом роль ведомого звена выполняет обойма с установленными на ней сателлитами.
2. Силовая передача по п.1, отличающаяся тем, что обойма, выполняющая роль ведомого звена, выполнена разборной.
| RU 2012138723 A, 10.03.2013 | |||
| Способ получения 3-нитро и 3-амино-4-ариламино-фениларсиновых кислот | 1928 |
|
SU28217A1 |
| БЕССТУПЕНЧАТАЯ ИМПУЛЬСНАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2008 |
|
RU2397388C2 |
| CN 201944210 A, 24.08.2011 | |||

