т I /
К )
Ji /J 1Л ZJ
OtoJ
1
Изобретепне относится к машиностроению, в частности к робототехнике, II может быть использовано для загрузки-разгрузки технологического оборудования в сборочных, сварочных, окрасочных операциях.
Цель изобретения расширение технологических возможностей нут.ем увеличения зо}1Ы обслуживания с одновременным уменьше ием эпергозатрат и ио вышением точности позиционироватшл.
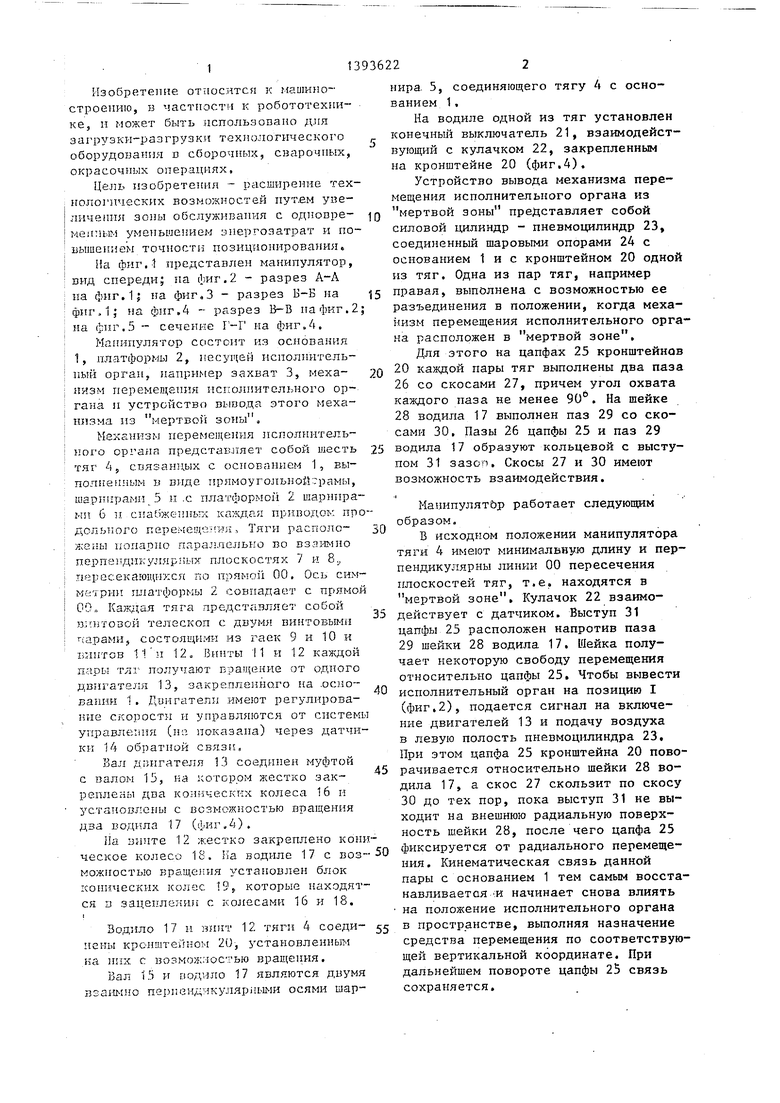
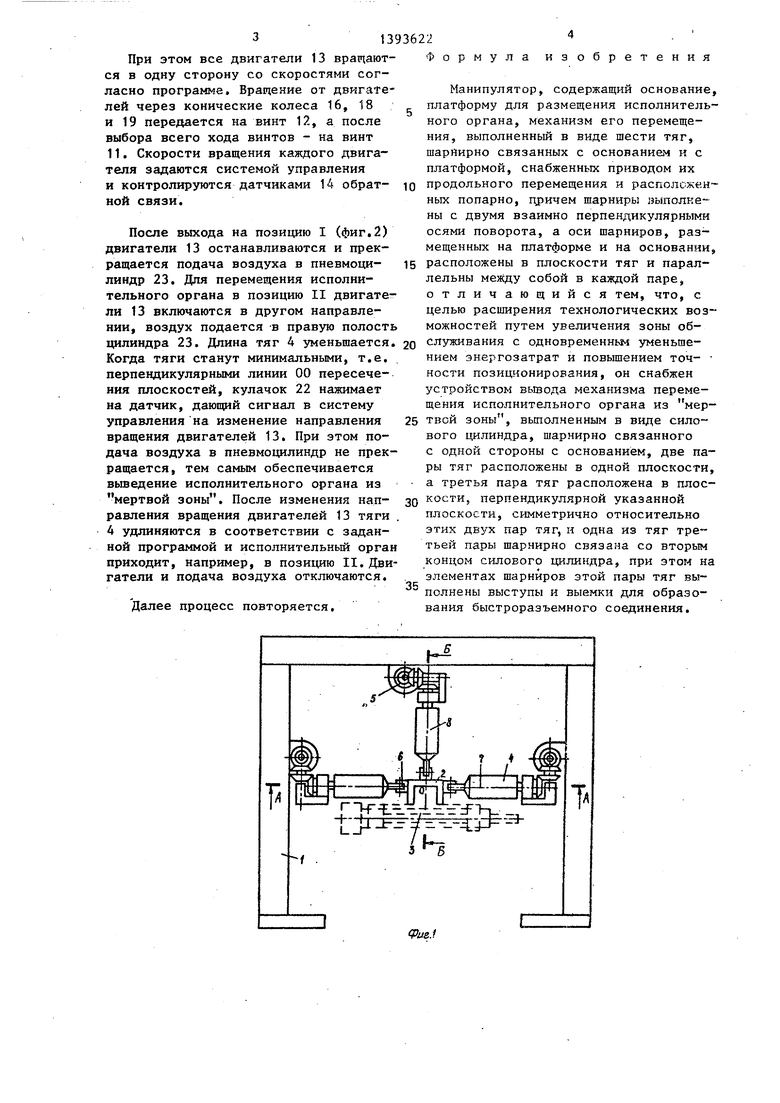
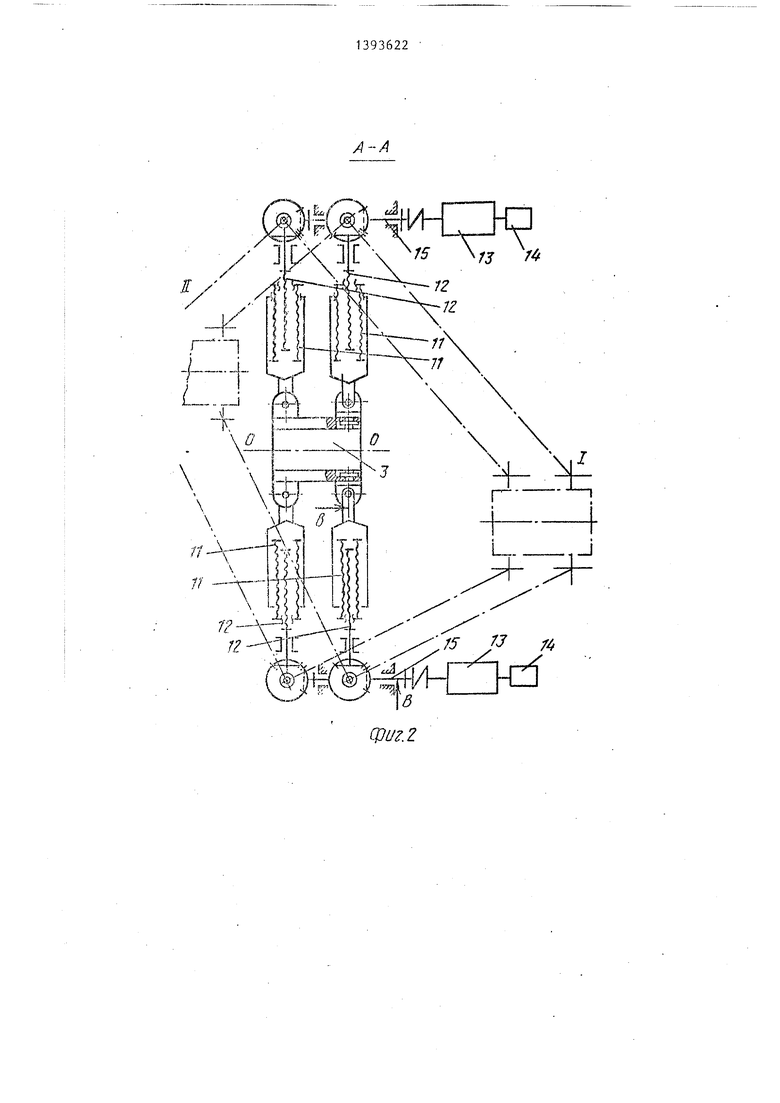
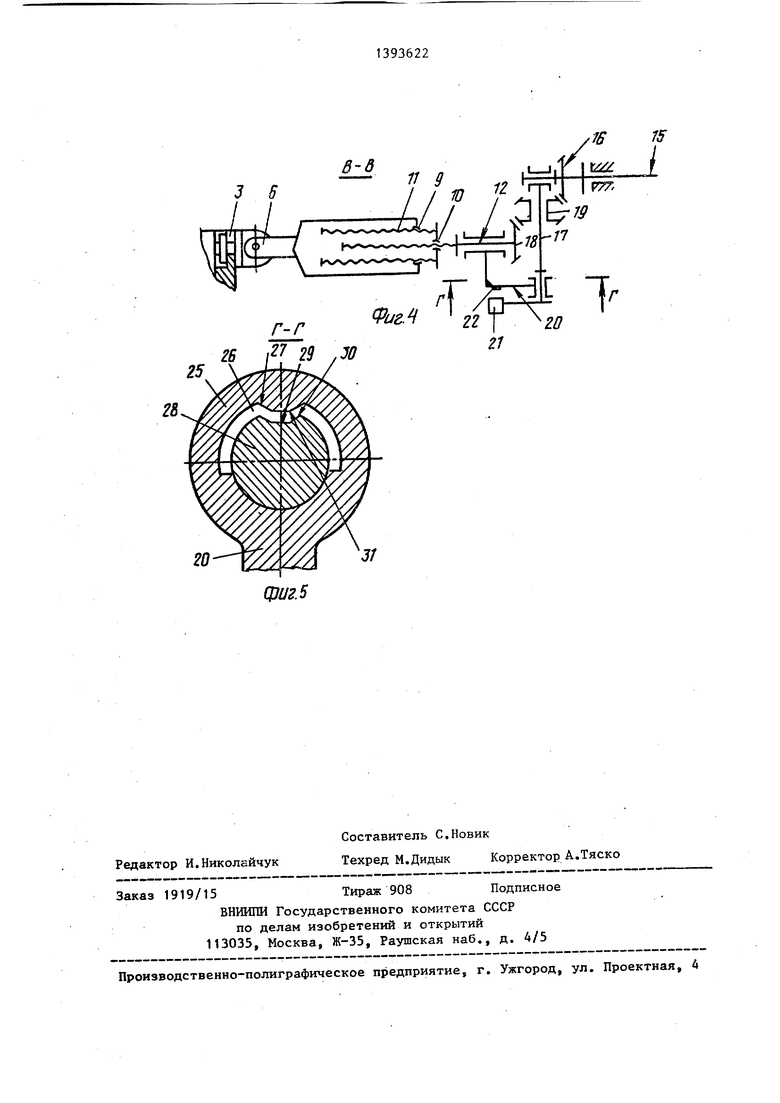
На фиг.1 представлен манинулятор, вид спереди; на фиг,2 - разрез А-А на фиг.1| на фиг.З - разрез Б-Б на фиг,1; на фиг,4 - разрез В-В на фиг,2 на фи.г,5 - сечение Г -Г на фиг,4,
Манипулятор состоит из основания 1, платформы 2, несущей исполнитель- Г1ый орган, напри ер захват 3, механизм перемещетпзя испо;п ител1 ного ор- га на и устройство вывода этого механизма из мертвоГ( зоны.
Механизм переме1дения исполнительного органа представляет собой шесть тяг 4, связанных с основанием 1, вы1
полнениым в виде прямоугольнойсрамы, шарнирами 5 п .с платформой 2 шарнирами 6 и снабженных каждая ириводок нро долыюго перемещения, Тяги распело- йсеаы попарно параллельно во взажшо перп-зндикулярпьк плоскостях 7 и 8., перес.екаю1цихсу( по прямо, 00, Ось симметрии тьчатфорьш 2 совпадает с прямой 00,, Каждая тяга представляет собой }зинтовой телескоп с двумя винтовыми riapaMH, состоящими из гаек 9 и 10 и винтов 11 п 12. Винты 11 и 12 каждой пары тлг- получают вращение от одного двигателя 13, закрепле1 наго на .основании 1, Двигатели имеют регулирование скорости и управляются от системы управления (HP, показана) через датчики 14 обратной связи,
Вал двигателя 13 соединен муфтой с валом 15, iia котором жестко закреплены два конических колеса 16 и установлены с возможностью вращения два водила 17 (фнг,4),
iia винте 12 жестко закреплено коническое колесо 18, Г) а водиле 17 с возможностью вращения установлен блок конических колес 19, которые находятся а зан.енлени с колесами 16 и 18,
Водило 17 и винт 12 тяги 4 соеди пены кронштейном 20, установленным на них с возможностью ,
Вал 15 и водило 17 являются двумя взаимно перг1ендчкуляр ыми осями шар-
;
10
о-30 йы3936222
мира. 5, соединяющего тягу 4 с основанием 1,
На водиле одной из тяг установлен конечньш выключатель 21, взаимодействующий с кулачком 22, закрепленным на кронштейне 20 (фиг,4),
Устройства вывода механизма перемещения исполнительного органа из мертвой зоны представляет собой силовой цилиндр - пневмоцилиндр 23, соединенный шаровыми опорами 24 с основанием 1 и с кронштейном 20 одной из тяг. Одна из пар тяг, например правая, выполнена с возможностью ее разъединения в положении, когда механизм перемещения исполнительного органа расположен в мертвой зоне,
Для этого на цапфах 25 кронштейнов 20 каждой пары тяг выполнены два паза 26 со скосами 27, причем угол охвата каждого паза не менее 90°, На шейке 28 водила 17 выполнен паз 29 со скосами 30, Пазы 26 цапфы 25 и паз 29 водила 17 образуют кольцевой с выступом 31 зазоп. Скосы 27 и 30 имеют возможность взаимодействия.
15
20
25
5
0
0
0
МаяипулятЬр работает следующим образом,
В исходном положении манипулятора тяги 4 имеют минимальную длину и перпендикулярны линии 00 пересечения плоскостей тяг, т,е. находятся в мертвой зоне. Кулачок 22 взаимодействует с датчиком. Выступ 31 цапфы 25 расположен напротив паза
29щейки 28 водила 17, Шейка получает некоторую свободу перемещения относительно цапфы 25, Чтобы вывести исполнительный орган на позицию I (фиг,2), подается сигнал на включение двигателей 13 и подачу воздуха
в левую полость пневмоцилиндра 23, При этом цапфа 25 кронштейна 20 пово- 5 рачивается относительно шейки 28 водила 17, а скос 27 скользит по скосу
30до тех пор, пока выступ 31 не выходит на внешнюю радиальную поверхность шейки 28, после чего цапфа 25 фиксируется от радиального перемещения. Кинематическая связь данной пары с основанием 1 тем самым восстанавливается (И начинает снова влиять
на положение исполнительного органа 5 в пространстве, выполняя назначение средства перемещения по соответствующей вертикальной координате. При дальнейшем повороте цапфы 25 связь сохраняется.
При этом все двигатели 13 вращаются в одну сторону со скоростями согласно программе. Вращение от двигателей через конические колеса 16, 18 и 19 передается на винт 12, а после выбора всего хода винтов - на винт 11. Скорости вращения каждого двигателя задаются системой управления и контролируются датчиками 14 обратной связи.
После выхода на позицию I (фиг.2) двигатели 13 останавливаются и прекращается подача воздуха в пневмоци- ликдр 23. Для перемещения исполнительного органа в позицию II двигатели 13 включаются в другом направлении, воздух подается в правую полость цилиндра 23. Длина тяг 4 уменьшается. Когда тяги станут минимальными, т.е. перпендикулярными линии 00 пересечения плоскостей, кулачок 22 нажимает на датчик, дающий сигнал в систему управления на изменение направления вращения двигателей 13. При этом подача воздуха в пневмоцилиндр не прекращается, тем самым обеспечивается вьшедение исполнительного органа из мертвой зоны. После изменения направления вращения двигателей 13 тяги 4 удлиняются в соответствии с заданной программой и исполнительный орган приходит, например, в позицию II. Двигатели и подача воздуха отключаются.
Далее процесс повторяется.
Формула изобретения
Манипулятор, содержащий основание, платформу для размещения исполнительного органа, механизм его перемещения, выполненный в виде шести тяг, шарнирно связанных с основанием и с платформой, снабженных приводом их продольного перемещения и располсжен ных попарно, гфичем шарниры зыполке ны с двумя взаимно перпендикулярными осями поворота, а оси шарниров, размещенных на платформе и на основании, расположены в плоскости тяг и параллельны между собой в каждой паре, отличающийся тем, что, с целью расширения технологических возможностей путем увеличения зоны обслуживания с одновременньм уменьшением энергозатрат и повышением точ- ности позиционирования, он снабжен устройством вьюода механизма перемещения исполнительного органа из мертвой зоны, вьшолненным в виде силового цилиндра, шарнирно связанного с одной стороны с основанием, две пары тяг расположены в одной плоскости, а третья пара тяг расположена в плоскости, перпендикулярной указанной плоскости, симметрично относительно этих двух пар тяг, и одна из тяг третьей пары шарнирно связана со вторым концом силового цилиндра, при этом на элементах шарниров этой пары тяг выполнены выступы и выемки для образования быстроразъемного соединения.
х;
гз /«
/5- / /4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи пялец к стегальной машине | 1979 |
|
SU1028749A1 |
| УСТРОЙСТВО РАЗВЕРТЫВАНИЯ-СКЛАДЫВАНИЯ АНТЕННЫ | 1996 |
|
RU2093932C1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| УСТРОЙСТВО ПРИОТКРЫВАНИЯ КРЫШКИ ВХОДНОГО ЛЮКА | 2007 |
|
RU2340509C1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1600814A1 |
| БОЕВАЯ МАШИНА ДЕСАНТА | 2001 |
|
RU2223460C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| АЭРОГИДРОДИНАМИЧЕСКИЙ ДВИГАТЕЛЬ КАРПУШКИНА | 2006 |
|
RU2320890C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| СПОСОБ ДОБЫЧИ КОРНЕЙ И КОРНЕВИЩ СОЛОДКИ, УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ НЕТОВАРНЫХ ЧАСТЕЙ КОРНЕЙ СОЛОДКИ, МАШИНА ДЛЯ ДОБЫЧИ КОРНЕЙ СОЛОДКИ, МАШИНА ДЛЯ УБОРКИ КОРНЕЙ РАСТЕНИЙ | 2000 |
|
RU2179384C1 |
Изобретение относится к области машиностроения и может быть использовано для загрузки-разгрузки технологического оборудования для вьтол- нения сборочньк, сварочных и окрасочных операций. Цель изобретения состоит в расширении технологических возможностей путем увеличения зоны об-. S-S ff 19 служивания с одновременным уменьшением энергозатрат и повышением точности позиционирования. Исполнительный орган связан с основанием 1 тремя парами тяг. В исходном положении две пары тяг расположены в одной плоскости, а третья пара тяг расположена в плоскости, перпендикулярной указанной, т.е. все тяги лежат в мертвой зоне. При перемещении исполнительного органа в горизонтальной плоскости включают устройство вывода исполнительного органа из мертвой зоны, имеющее пневмоцилиндр 23, шарнирно связанный одним концом с основанием 1, а другим концом - с одной из тяг третьей пары. Шарниры тяг зтой пары имеют быстроразъемное соединение, выводящие их из кинематической связи со своим приводом продольного перемещения. 5 ил. С 9 Г5х 1 1 i. t / 23 h- « О Од а ГчЭ ю
Ф1.2
J 5
I V/N/
25
r-r
ZB f7 29 :50
20
фиг. 5
в-в
// 9
././xx%..
| Авторское свидетельство СССР 1148271, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
