со со со
00
ел
г. 2
ИзоР5ретение относится к подъемно- |гранспортному оборудованию и может . ыть использовано при выполнении Ьтроительных, отделочных и ремонтных работ.
Цель изобретения - растирание зоны обслуживания.
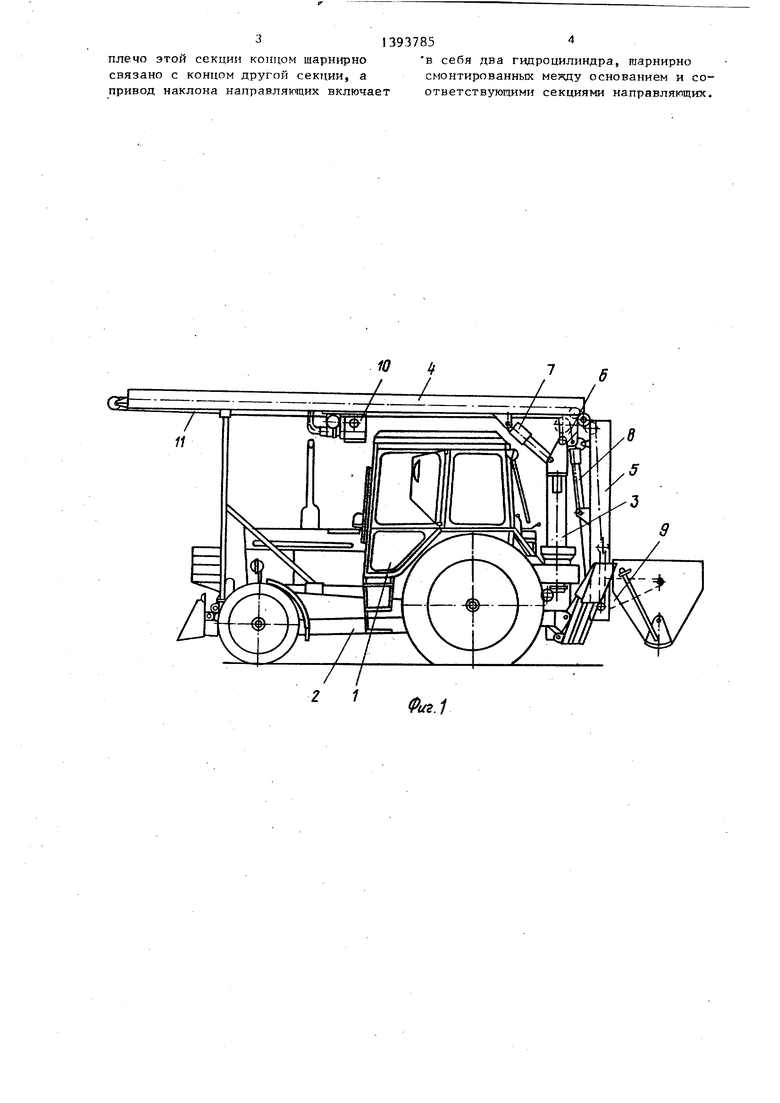
На фиг. 1 подъемник в транспортном положении, обший вид; на фиг.2 - то же, при горизонтальном положении sia4Tbi; на Лиг.З - то же, при вертикальном положении мачты.
Подъемник содержит базовую маши- яу 1, на которой навешена рама 2- яутригерами и отвалом. На раме 2 ус- гановлено поворотное основание 3, не- |сущее складную мачту с направляющими, ростоящую из одной верхней 4 и другой нижней 5 секций. На нижнем конце верхней секции 4 жестко закреплен ронштейн б. Кронштейн б шарнирно соединен с поворотным основа нием 3, которое связано посредством гидроцилиндра 7 с верхним концом секции 4. Нихснее плечо секции 5 посредст Вом гидроцилиндра 8 связано с концом верхней секции 4. На направляющих мачты установлена тележка 9, на ко- ;торой крепится грузо::1ахЕ(атное устрсй iCTBO (бункер, грузовая площадка, |люлька5 вилы и др.)- Тележка 9 связа |на с механизмом 10 перемещения гиб- :ким звеном 11.
Подъемник работает следующим образом.
При транспортном положении подъемника аутригеры и отвал рамы 2 находятся в крайнем вepxнe 5 положении, верхняя секция 4 мачты занимает горизонтальное положение над базовой машиной 1 я а нижняя секция 5 находится в вертикальноь) положении. Тележка 9 находится в крайнем н:ижнем положении нижней секции 5, В зависимости от выполняемых; работ на тележку 9 устанавливается сменное грузозахватное устройство (бункер5 грузовая площадка; люлькаJ вилы и др..)« В указанном положении под7:,емник может работать в качестве передвижного погрузчика. Те лежка 9 с грузозахватным устройством передвигается в пределах нижней секции 5. Перемещение тележки 9 производится механизмом 0 перемещения посредством гибкого звена 11 .Для работы подъемника в стацио- нарн ом положении аутригеры рамы 2 з с танавливаются в крайнее нижнее поло-
,,.
JQ
|5 20 25
S
30
35
40
45
50
жение, что повыгаает устойчивость подъемника.
При включении гидроцилиндра 8, связанного с кронштейном 6 верхней секции 4, шток цилиндра вьщвигается и нижняя секция 5 поворачивается на 90 , занимая горизонтальное положение на уровне верхней секции 4.
В таком положении мачты груз с тележкой 9 перемещается от уровня земли до уровня верхней секции 4 и по горизонтальной плоскости.
При включении гидроцилиндра 7 верхняя секция 4 может устанавливаться в наклонном положении, что позволяет увеличить высоту подъема груза и перемещать тележку с грузом в оконные проемы или на кровлю под углом.
При переводе мачты из транспортного положения в вертикальное верхняя секция 4 посредством гидроцилиндра 7 поворачивается на 90, нижняя секция 5 при зтом опускается до уровня земли без воздействия гидроцилиндра 8 за счет смещения кронштейна 6 (наличия плеча) верхней секции 4 относительно шарнира сочленения.
В указанном положении мачты тележка 9 с грузом перемещается в вертикальной плоскости вдоль мачты.
Для перевода подъемника в транспортное положение верхняя секция 4 посредством гидроцмлнндра 7 поворачи- вабтся на 90 , занимая горизонтальное положение, а нижняя секция 5 за счет смещения кронштейна 7 относительно шарнира сочленения секций поднимается, образуя дорожный просвет.
Формула изобретения Подъемник, содержащий раму на ходовых колесах, поворотное в горизонтальной плоскости основание, смонтированное на раме, грузозахватное устройство, смонтированное с возможностью поступательного движения в на- правлякяцих, шарнирно закрепленных на поворотном основании с возможностью наклона их в вертикальной плоскости, привод перемещения грузозахватного устройства в направлящих, включающий в себя передачу с гибким звеном, привод наклона направлякнцих, отличающийся тем, что, с целью расширения зоны обслуживания, направляющие выполнены из двух секций, одна из них связана средней частью с шарниром поворотного основания, одно
313937854
плечо этой секции концом шарн1фно в себя два гидроцилиндра, гаарнирно связано с концом другой секции, а смонтированных между основанием и со- привод наклона направляющих включает ответствующими секциями направляющих.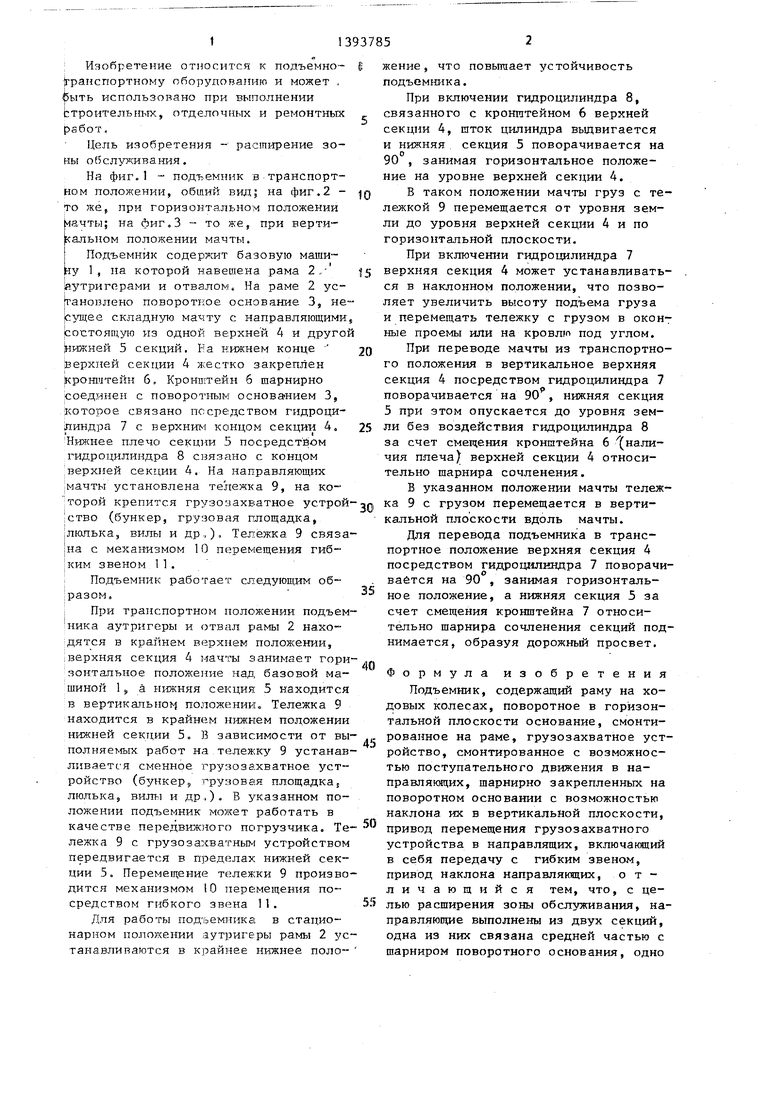
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| ПОДЪЕМНИК ГИДРАВЛИЧЕСКИЙ | 2011 |
|
RU2458849C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| Прицеп для перевозки на раме тягача | 2022 |
|
RU2789565C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Подъемник | 1990 |
|
SU1770248A2 |
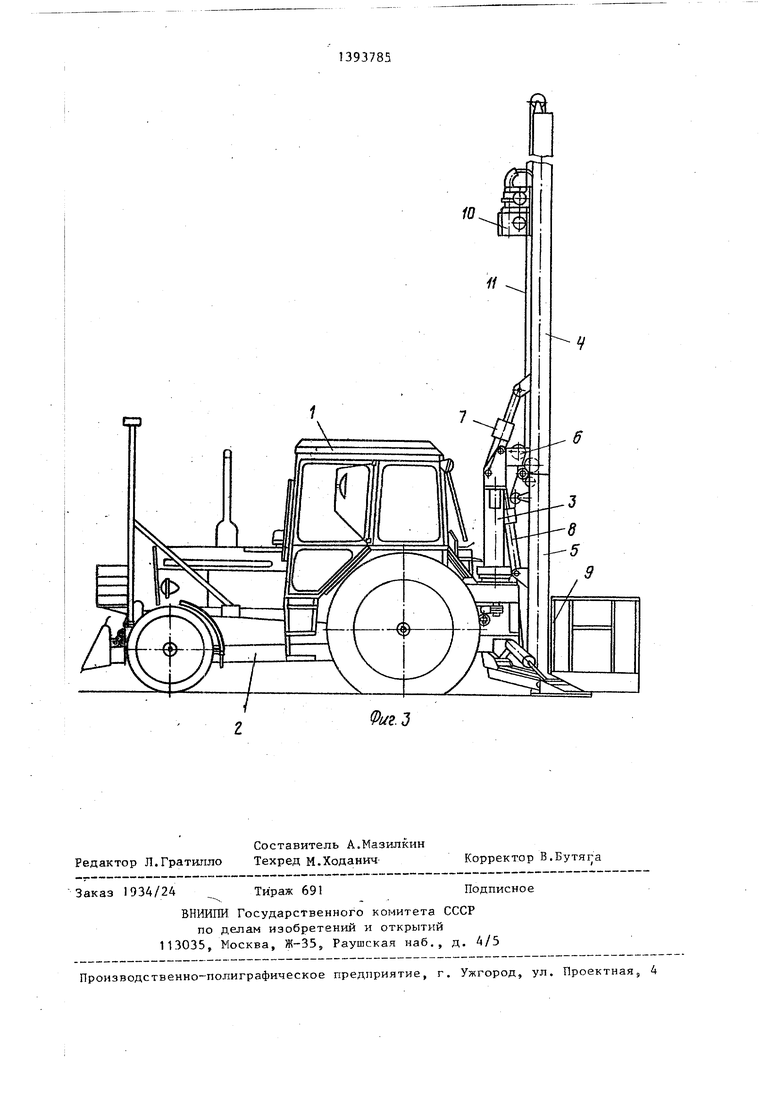
Изобретение относится к подъемно-транспортному оборудопанию и может быть использовано при выполнении строительных, отделочных и ремонтных работ. Цель изобретения - расширение зоны обслуживания. Подъемник содержит базовую машину 1 с рамой 2, имеющей ходовые колеса, на которой смонтировано поворотное основание 3, несущее складную мачту с направляющими, состоящую из верхней 4 и нижней 5 секций. На верхней секции 4 смонтирован кронштейн 6, шарнирно связанный с поворотным основанием 3, которое посредством гидрО11 1Линдра 7 связано с верхним концом секции 4. Нижнее плечо секции 5 гидрО1Щлиндром 8 связано с концом верхней секции 4. На направляющих мачты смонтирована с возможностью перемещения тележка 9 с закрепленным на ней грузозахватным устройством. Тележка 9 связана с приводом 10 перемещения гибким звеном 11. 3 ил. О)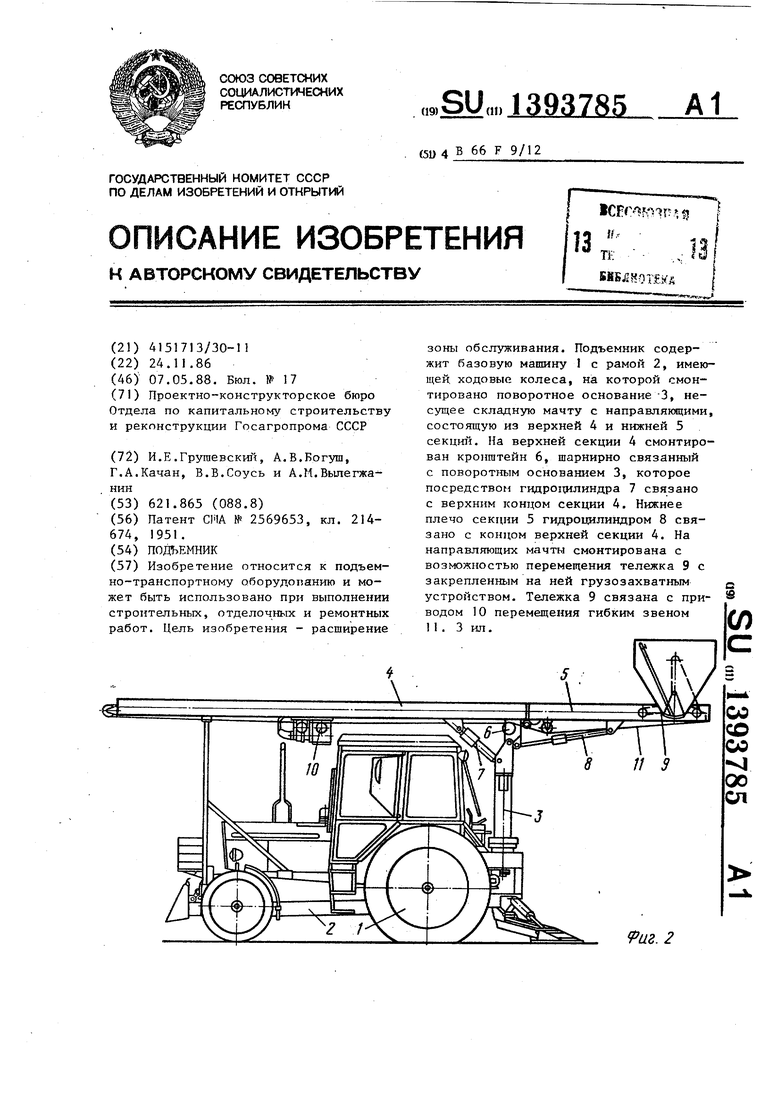
Фи2.1
| СПОСОБ БУРЕНИЯ СКВАЖИНЫ ПОД КОНДУКТОР ПРИ КАТАСТРОФИЧЕСКОМ ПОГЛОЩЕНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569653C1 |
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
