1
Изобретение относится к рациолокационной технике и может быть использовано при реализации автоматических следящих систем, работающих.по информации, закодированной во временном положении импульса относительно середины интервала наблюдения.
Известно устройство для определения положения импульса относительно середины интервала наблюдения, основанное на временном дискриминировании JL.
Однако при реализации следящих измерителей наряду с задачей получения высокой точности измерения необхрдимо обеспечить высокую надежность сопровождения, что достигается, определением положения импульса на временной оси не временным дискриминированием, а временной фиксацией.
Известно также устройство для определения временного положения импульсов с временной фиксацией относительно начала или конца интервала наблюдения, включающее генератор линейно-изменяю-
щегося напряжения, генератор селектор-ных импульсов, элементы совпадения 2
Однако данное устройства обладает недостаточной точностью фиксации, что связано с влиянием на работу устройства параметров импульсов, и конструктивной сложностью.
Цель изобретения - повышение точности и упрощение конструкции устройства.
Указанная цель достигается тем, что в устройство для определения временного положения импульсов, содержащее формирователь Порогового уровня, вход и выход которого соединены со входами )сом- паратора, датчик интервалов наблюдения и интегратор, введен коммутатор опорных напряжений, управляемые входы которого соединены с выходами компаратора и датчика интервалов наблюдения, а выходы коммутатора опорных напряжений соединены с сигнальными входами интегратора, управляемый вход которого соединен с выходом датчика интервалов наблюдения.
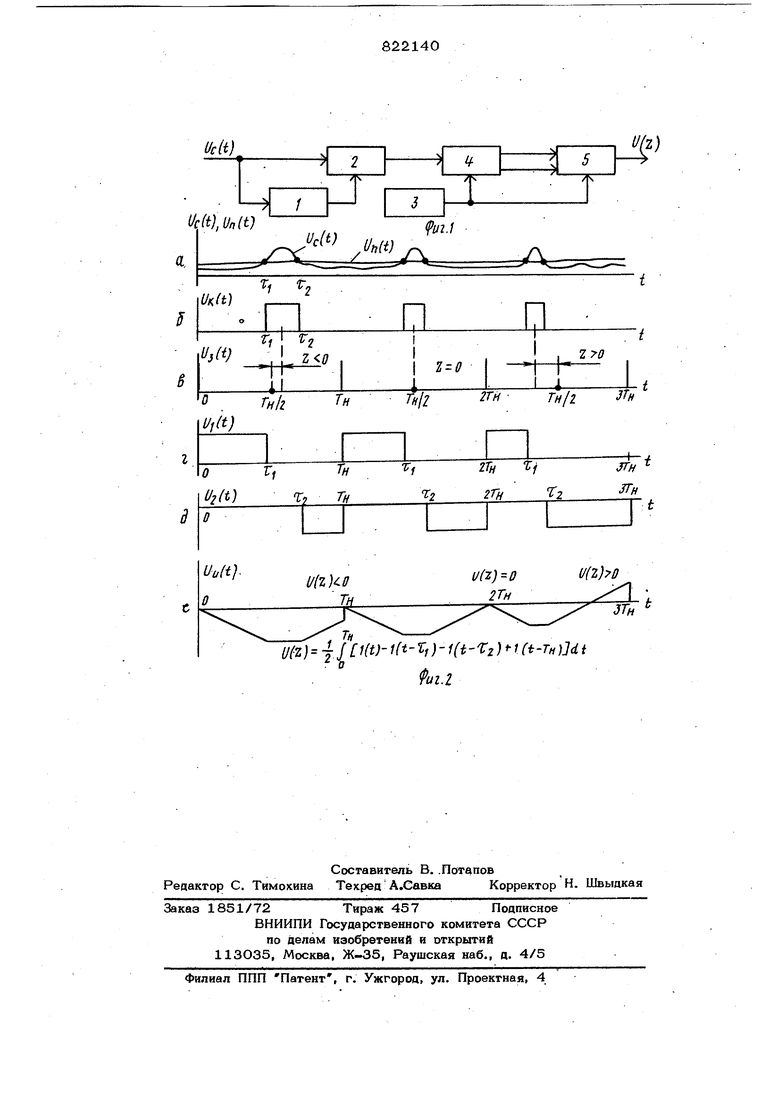
На фиг, 1 приведена структурная схема предлагаемого устройства; на фиг. 2временные диаграммы, поясняющие его работу.
Устройство цля определения временного положения импульсов содержит формирователь 1 порогового уровня, компаратор 2, датчик 3 интервалов наблюдения коммутатор 4 опорных напряжений и интегратор 5.
Устройство работает следующим образом.
Выходное напряжение Uc( (фиг. 2а поступает на вход компаратора 2, где сравнивается с полученным пороговым напряжением и п (Ь) (фиг. 2г), поступающим с выхода формирователя на второй вход компаратора. С выхода компаратора напряжение llK. (фиг. 26) поступает на у;правляемый вход коммутатора 4 опорных напряжений, на второй управляемый вход которого и управляемый вход интегратора 5 со сбросом поступают тактовые импульсы и/ It) (фиг. 2Ъ) с датчика 3 интервалов наблюдения.
С началом наблюдения при необнаружении сигналов с -первого выхода коммутатора 4 снимается положительное на;пряжение (J ЛМ А (фиг. 2 г), амплитуда которого остается неизменной до момента обнаружения сигнала tl ,( (фиг. 2.в). В мо,мент обнаружения сигнала (передний фрон импульса пересекает пороговый уровень (фиг. 2 e),U(i становится и остается равным нулю до конца интервала наблюдения. Напряжение U g М на втором выходе коммутатора 4 постоянное и равно нулю до момента пересечения задним фронтом импульса порогового уровня t 2 (фиг. 2,а). В момент L 7 , U 7 (t) принимает значение А (фиг. 2д), которое остается постоянным до момента окончания интервала наблюдения. Напряжеяия ) и выходов коммутатора 4 поступают на сигнальные входы интегратора 5
со сбросом. В результате интегрирования на выходе интегратора при окончании ин- тервала наблюдения формируется напря- жение и J, l-t) (фиг. 2,е), величина и знак
которого пропорциональны положению импульса относительно середины интерваланаблюдения.
Устройство для определения временного положения импульсов, таким образом,
реализует способ временной фиксации по обоим фронтам, что позволяет уменьшить влияние амплитуды и формы вершины импульса на точность определения положения последнего, исключить зависимость
работы устройства.
Формула изобретения
Устройство цля определения временного положения импульсов, содержащее формирователь порогового уровня, вход и выход которого соединены со входами компаратора, датчик интервалов наблюдения и
5 интегратор, отличающееся тем, что,с целью повышения точности и упрощения конструкции, в него введен коммутатор опорных напряжений, управляемые входы которого соединены с выходаQ ми компаратора и датчика интервалов наблюдения, а выходы коммутатора опорных напряжений соединены с сигнальными входами интегратора, управляемый вход которого соединен с выходом датчика интервалов наблюдения.
Источники информации, принятые во внимание при экспертизе
1.Митяшев Б. Н. Определение временного положения импульсов при наличии помех. М., Сов. радио, 1962, с. 86.
2.Поиск, обнаружение и измерение параметров сигналов в радионавигационных системах. Под ред. Ю. М. Казаринова.
М., Сов. рацио, 1975 г. с. 231, рис. 7166.
U()-i(t-i:i}-i(tt2} r(
ui.l
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения временного положения пачки импульсов | 1981 |
|
SU1004957A1 |
| Временной селектор видеоимпульсов для дальномера | 1982 |
|
SU1070495A1 |
| Устройство для управления вентильным преобразователем | 1977 |
|
SU748780A1 |
| Устройство для контроля датчиков углового положения | 1976 |
|
SU652600A1 |
| Устройство для управления автономным полумостовым инвертором напряжения | 1984 |
|
SU1246299A1 |
| Способ измерения времени установления выходного сигнала цифроаналоговых преобразователей и устройство для его осуществления | 1987 |
|
SU1494216A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2001 |
|
RU2210184C2 |
| Способ измерения линейных перемещений и устройство для его осуществления | 1989 |
|
SU1820198A1 |
| Фотоэлектрическое устройство контроля дефектов поверхности | 1986 |
|
SU1317337A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1981 |
|
SU1840281A1 |