со со
СП
00
го
Изобретение относится к контролю технического состояния скважин методом про- филеметрии.
Целью изобретения является повышение оперативности калибровки за счет ее про- ведения в процессе измерений в скважине.
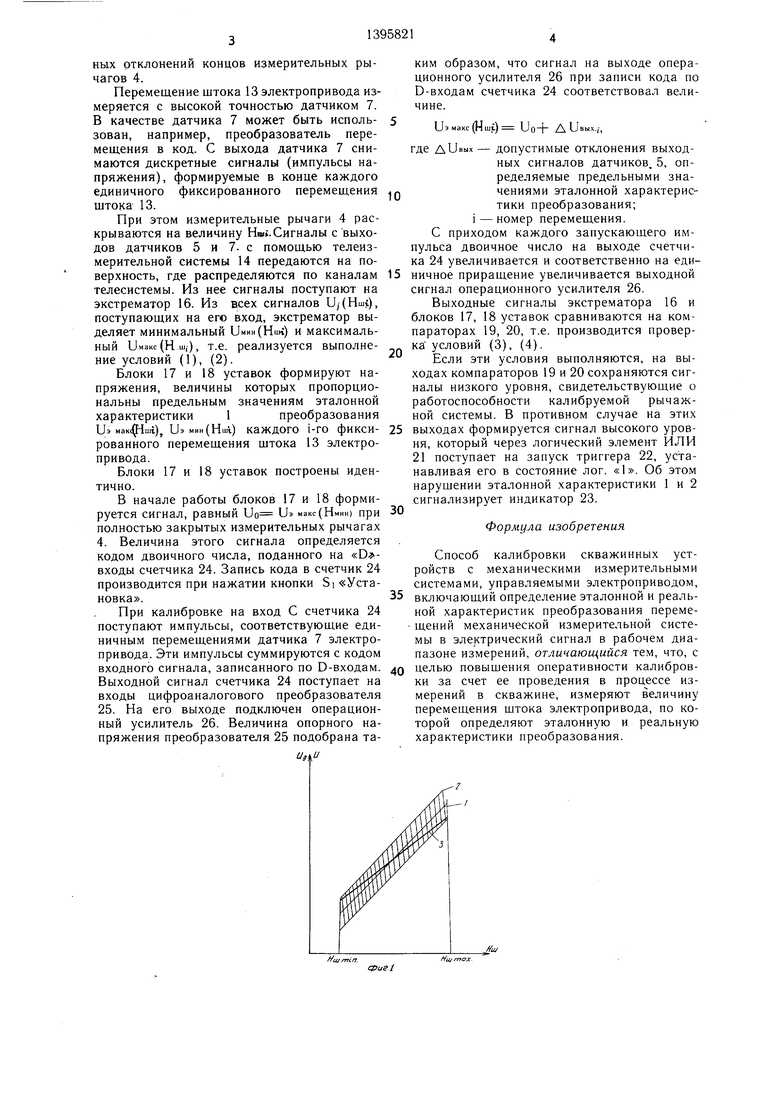
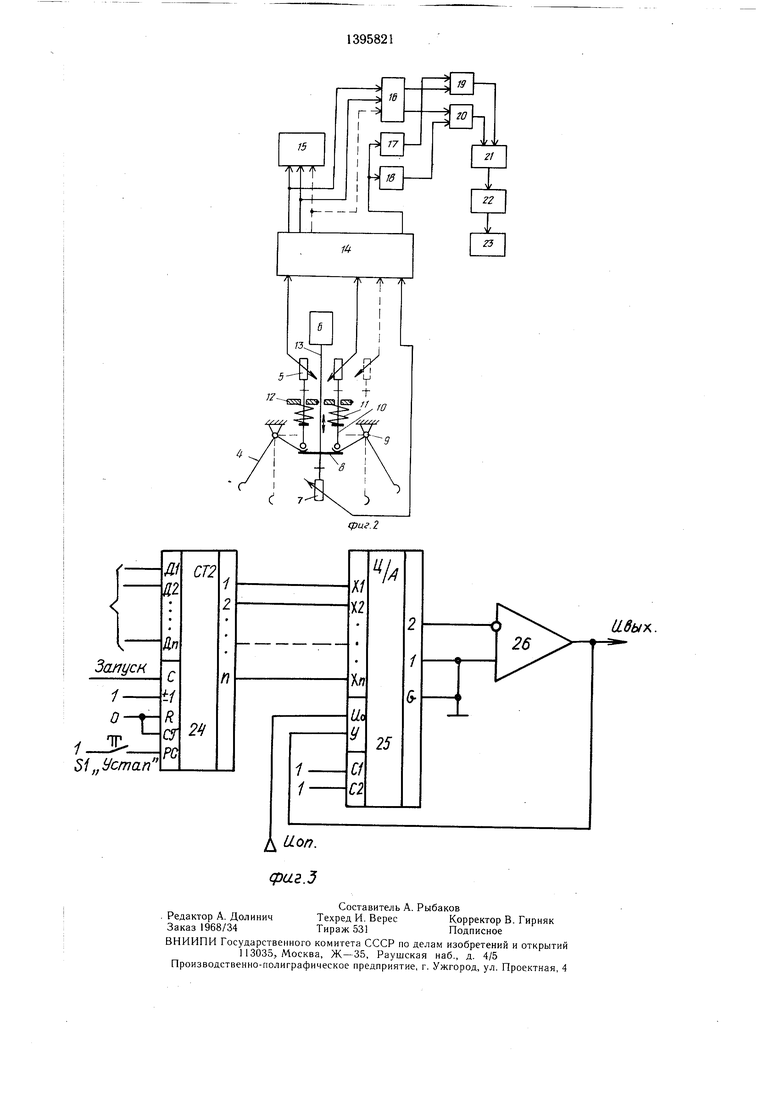
На фиг. 1 приведены градуировочные характеристики, соответствующие рабочему диапазону раскрытия одного из измерительных рь1чагов устройства; на фиг. 2 - блок-схема устройства калибровки; на фиг. 3 - функциональная схема блока уставок устройства.
В процессе калибровки устанавливается эталонная характеристика 1, зона допуска, ограниченная двумя прямыми 2, реальная характеристика 3 преобразования.
Способ реализуется с помощью устройства, содержащего измерительные рычаги 4, механически связанные с датчиками 5 рычагов 4, электропривод 6 с датчиком 7, упор 8, шарниры 9, штоки 10 рычагов 4, пружины 11, опирающиеся на корпус 12, шток 13 электропривода 6, телеизмерительную систему 14, регистратор 15, экстрематор 16, блоки 17, 18 уставок предельных значений эталонной характеристики Ыэ, компараторы 19 и 20, логический элемент ИЛИ 21, триггер 22, индикатор 23.
Блок уставок содержит двоичный п-раз- I рядный счетчик 24, цифро-аналоговый пре- образователь 25, операционный усилитель
I26.
i Способ реализуется следующим образом. В процессе калибровки аппаратуры уста- |навливается вид эталонной характеристики
I1преобразования линейных перемещений штока 10 (Нш) в электрический сигнал иэ (Нш) при открытии каждого измерительiHoro рычага 4. Здесь j 1,...,8 -г- номер измерительного рычага. Диапазон перемещения штока 10 равен Нш мин-Ншмакс. Зона допуска ограничена двумя прямыми 2, задающи- ми предельные значения максимальных
Uanaxc (Нш) и МИНИМаЛЬНЫХ US.MUK (Нш)
величин эталонной характеристики 1 преобразования линейных перемещений щтока 10 в электрический сигнал.
При каждом раскрытии измерительных рычагов 4 производится калибровка аппаратуры.
В процессе калибровки измеряется реальная характеристика 3 преобразования линейных перемещений штока 13 электропривода 6 в электрический сигнал U (Нш1) для каж- дого измерительного рычага 4 и сравнивается с предельными значениями 2 эталонных характеристик UJMU (Н),
и апахс (Нш1 )
Реальная характеристика 3 кроме полезной информации отражает погрешности, связанные с неточностью настройки аппаратуры, износом кулачков малых плеч измерительных рычагов 4 и др.
п
5
5
0
5
0
Если аппаратура работоспособна, то ее реальная характеристика должна лежать в пределах зоны допусков эталонной характеристики 1, на фиг. 1 эта зона ограничена прямыми 2.
При реализации предлагаемого способа выполняются следующие операции:
1)допустимая величина линейного перемещения штока 10, соответствующая рабочему диапазону раскрытия измедите ь- ных рычагов 4, квантуется с заданной дискретностью дНш;
2)измеряется величина линейного перемещения штока 13 электропривода 6
Нш1 ДНи/
3)измеряется значение реальной характеристики преобразования линейного перемещения штока 10 в электрический сигнал U (Hmi) ДЛЯ каждого измерительного рычага 4;
4)из всех измеренных значений UiXHrni), j 1,...,8 выбирается максимальное имакс(Нш1) {максиЧНш{)(1)
и минимальное имнк(Нш1) /мини (Нш,-) (2);
5)проводится сопоставление дискретных значений реальной характеристики 3 и«акс(Нш,), имин(Нш,-) С соответствующими эталонными значениями 2, полученными при поверке прибора на базе, т.е. проверяются условия
Us мин(Нш) UMHH(Hmi),(3)
Us макс(Нш1) имакс(Нш1);(4)
6)ПО результатам проверки условий (3) и (4) при перемещении щтока 10 в интервале (Нш мин, Нш макс) делается заключение о работоспособности аппаратуры;
7)процесс калибровки заверщается при полном раскрытии рабочего диапазона измерительных рычагов 4.
Устройство, с помощью которого реализуется способ, работает следующим образом.
В исходном положении рычажной измерительной системы рычаги 4 закрыты (их положение изображено на фиг. 2 штриховой линией), упор 8, закрепленный на штоке 13 электропривода 6, находится & верхнем положении, пружины 11 сжаты. С выводов датчиков 5 измерительных рычагов 4 снимаются сигналы, пропорциональные радиусу скважинного прибора. При включении электропривода 6 шток 13 электропривода с упором 8 начинают перемещаться вниз, ослабляя пружины 11. Под действием пружин 11 начинают раскрываться рычаги 4, поворачивающиеся вокруг шарниров 9, перемещения штоков 10 рычагов 4 передаются датчикам 5 рычагов 4.
В качестве датчиков 5 могут быть использованы резистивные датчики линейных перемещений, с выходов, которых снимаются сигналы, пропорциональные величинам радиальных отклонений концов измерительных рычагов 4.
Перемещение штока 13 электропривода измеряется с высокой точностью датчиком 7. В качестве датчика 7 может быть использован, например, преобразователь перемещения в код. С выхода датчика 7 снимаются дискретные сигналы (импульсы напряжения), формируемые в конце каждого единичного фиксированного перемещения штока 13.
При этом измерительные рычаги 4 раскрываются на величину Нш.Сигналы с выходов датчиков 5 и 7. с помощью телеизмерительной системы 14 передаются на поверхность, где распределяются по каналам телесистемы. Из нее сигналы поступают на экстрематор 16. Из всех сигналов Uy(Hmi), поступающих на его вход, экстрематор выделяет минимальный UMHH(Hiin) и максимальный имакс(Н.ш,), т.е. реализуется выполнение условий (1), (2).
Блоки 17 и 18 уставок формируют напряжения, величины которых пропорциональны предельным значениям эталонной характеристики 1преобразования
УЭ мак(Нш1) Us мин(Нш1) каждого i-го фикси- рованного перемещения штока 13 электропривода.
Блоки 17 и 18 уставок построены идентично.
В начале работы блоков 17 и 18 формируется сигнал, равный Uo Уэ макс(Нмин) при полностью закрытых измерительных рычагах 4. Величина этого сигнала определяется кодом двоичного числа, поданного на входы счетчика 24. Запись кода в счетчик 24 производится при нажатии кнопки Si «Установка.
При калибровке на вход С счетчика 24 поступают импульсы, соответствующие единичным перемещениями датчика 7 электропривода. Эти импульсы суммируются с кодом входного сигнала, записанного по D-входам. Выходной сигнал счетчика 24 поступает на входы цифроаналогового преобразователя 25. На его выходе подключен операционный усилитель 26. Величина опорного напряжения преобразователя 25 подобрана .
КИМ образом, что сигнал на выходе операционного усилителя 26 при записи кода по D-входам счетчика 24 соответствовал величине.
УЭ макс (Hmi) UQ-J- Д LJebix.,-,
где дУвых- допустимые отклонения выходных сигналов датчиков. 5, определяемые предельными зна- Qчениями эталонной характеристики преобразования; i - номер перемещения. С приходом каждого запускающего импульса двоичное число на выходе счетчика 24 увеличивается и соответственно на еди- ничное приращение увеличивается выходной сигнал операционного усилителя 26.
Выходные сигналы экстрематора 16 и блоков 17, 18 уставок сравниваются на компараторах 19, 20, т.е. производится проверка условий (3), (4).
Если эти условия выполняются, на выходах компараторов 19 и 20 сохраняются сигналы низкого уровня, свидетельствующие о работоспособности калибруемой рычажной системы. В противном случае на этих 5 выходах формируется сигнал высокого уровня, который через логический элемент ИЛИ 21 поступает на запуск триггера 22, устанавливая его в состояние лог. «1. Об этом нарушении эталонной характеристики 1 и 2 сигнализирует индикатор 23.
0
Формула изобретения
5
Способ калибровки скважинных устройств с механическими измерительными системами, управляемыми электроприводом, включающий определение эталонной и реальной характеристик преобразования переме- щений механической измерительной системы в электрический сигнал в рабочем диапазоне измерений, отличающийся тем, что, с 0 целью повышения оперативности калибровки за счет ее проведения в процессе измерений в скважине, измеряют величину перемещения щтока электропривода, по которой определяют эталонную и реальную характеристики преобразования.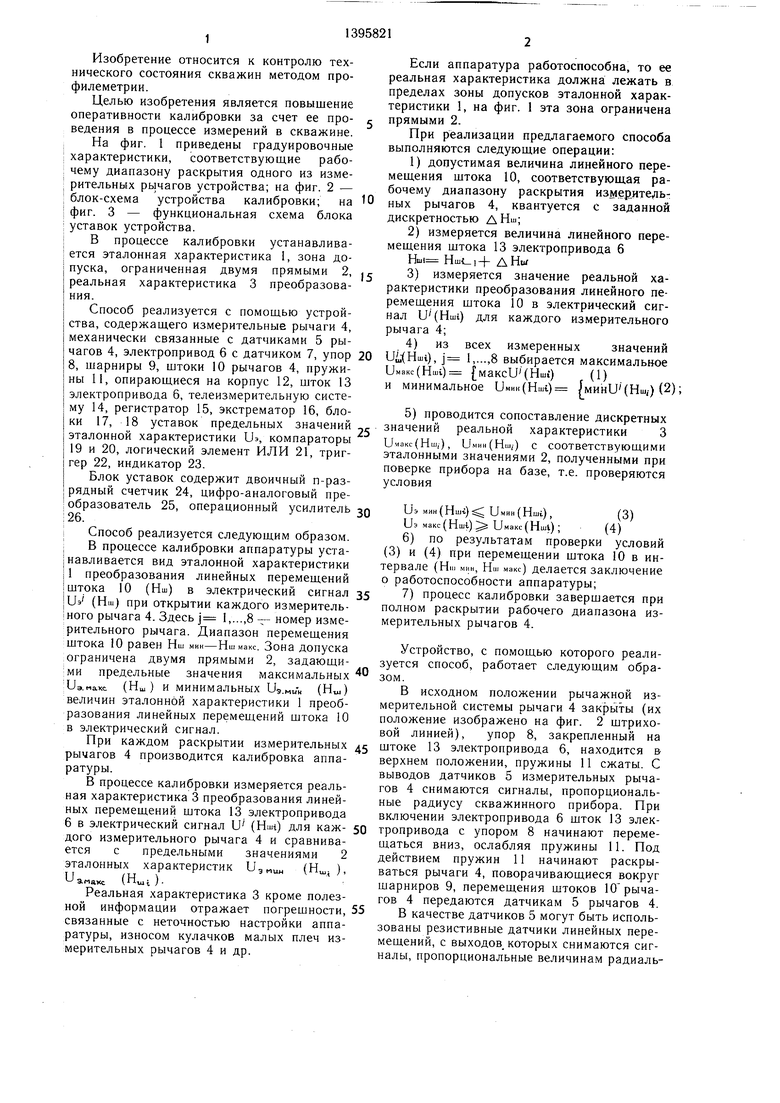
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ калибровки скважинных механических измерительных систем, управляемых электроприводом, и устройство для его осуществления | 1987 |
|
SU1492039A1 |
| Скважинный профилемер | 1985 |
|
SU1317115A1 |
| ОПТИЧЕСКОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ И УСТРАНЕНИЯ НЕИСПРАВНОСТЕЙ | 2014 |
|
RU2657027C1 |
| Устройство управления буровым насосом | 1982 |
|
SU1027377A1 |
| СКВАЖИННЫЙ ПРОФИЛЕМЕР | 2008 |
|
RU2382880C1 |
| Способ определения и восстановления формы переходной характеристики линейных систем | 1990 |
|
SU1748090A1 |
| Измерительный комплекс | 1988 |
|
SU1582156A1 |
| МОДУЛЯЦИОННЫЙ РАДИОМЕТР | 2001 |
|
RU2187824C1 |
| СПОСОБ ИМИТАЦИОННОЙ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНЫХ КАНАЛОВ СИСТЕМЫ УПРАВЛЕНИЯ РАЗГРУЗОЧНО-ЗАГРУЗОЧНОЙ МАШИНЫ ЯДЕРНОГО РЕАКТОРА | 2011 |
|
RU2479875C1 |
| Устройство для измерения профиля скважины | 1989 |
|
SU1686148A1 |
Изобретение относится к области контроля технического состояния скважин. Цель изобретения - повышение оперативности калибровки за счет ее проведения в процессе измерений в скважине. Калибровку сква- жинных устр-в осуществляют с помощью управляемых электроприводов со щтоками. Определяют эталонную и реальную характеристики преобразования перемещений механической измерительной системы в электрический сигнал в рабочем диапазоне измерений. Эталонную и реальную характеристики преобразования определяют по измеренной величине перемещения щтоков электроприводов. В процессе калибировки измеряется реальная характеристика преобразования линейных перемещений штока электропривода в электрический сигнал и сравнивается с предельными значениями эталонных характеристик. Реальная характеристика, кроме полезной информации, отражает погрешности, связанные с неточностью настройки аппаратуры. 3 ил. о (Л
фаг.З
Редактор А. Долинич Заказ 1968/34
Составитель А. Рыбаков
Техред И. ВересКорректор В. Гирняк
Тираж 531Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое нредприятие, г. Ужгород, ул. Проектная, 4
(Лвыу.
| Дьяконов Д | |||
| И | |||
| Общий курс геофизических исследований скважин | |||
| М.: Недра, 1984, с | |||
| Ледорезный аппарат | 1921 |
|
SU322A1 |
