ее со (У1 со
&0 4:
10
25
Изобретение относится к измери- Гельной технике и может быть исполь- :3овано для определения форм труб или шаблонов, изготовленных по месту из калиброванной проволоки.
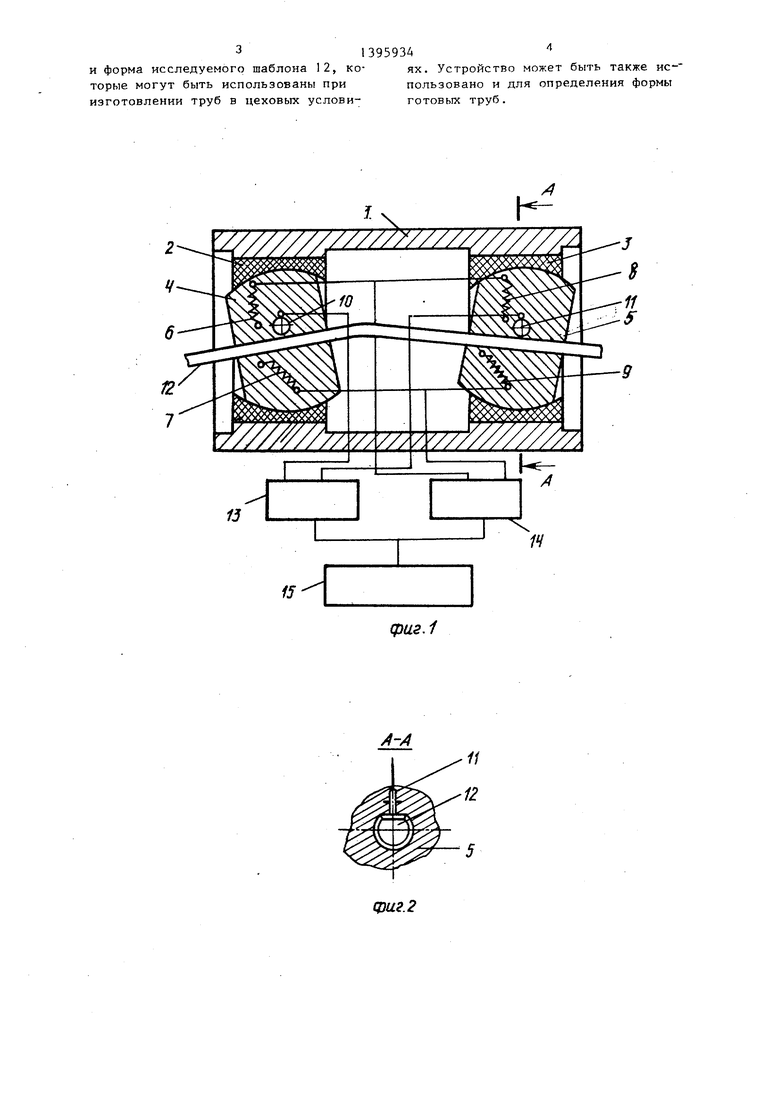
Целью изобретения является расширение технологияескик возможностей йутем обеспечений измерений в трехмерном пространстве. i На фиг.1 показана схема устройстia для определения формы шаблонов и руб; на фиг.2 - разрез А-А на фиг.1; а фиг.З - схема измерения геометри- iiecKHx параметров шаблона.
I Устройство содержит цилиндричес- 1|сий корпус 1 из немагнитного материа- jia, соосно закрепленные в нем посто- jjiHHbie ко льцевые магниты 2 и 3 со сфе-; |ическими внутренними поверхностями, 20 установленные в них с возможностью оворота сферические обоймы 4 и 5 Из электроизолирующего материала, в саждой из которых закреплены катуш- Ки 6-9 индуктивностей с взаимно Перпендикулярными осями симметрии. Направленными по осям ортогональной системы координат, закрепленные на Ьбоймах 4 и 5 датчики пути с обкат- ными роликами 10 и 11 ,-взаимодейст- |Вуго1цими с исследуемым шаблоном 12, и |отсчетно-регистрирующий блок, выполненный в виде преобразователей 13 и 14, подключенных соответственно к датчикам пути с обкатными роликами |10, II и к катушкам 6-9 индуктив- |ностей, и вычислительного блока 15, . |подключенного к выходам преобразова- телей 13 и 14. Шаблон 12 изготавливают из мягкой проволоки с лыской для контактирования с датчиками пути с обкатными роликами 10 И; 11 . Отверстия в обоймах 4 и 5 выполняют из условия незаклинивания шаблона 12 при их относительном движении.
Устройство работает следующим образом. .
В исходном состоянии на нерабочий прямолинейный участок гааблона 12 устанавливают обоймы 4 и 5 и обнуляют вычислительный блок 15. При измерении перемещают корпус 1 вдоль шаблона 12. При прохождении криволинейного участка шаблона 12 обоймы 4 и 5 поворачиваются в магнитах 2 и 3, а датчики пути с обкатными роликами 10 и 11 измеряют величины относительных перемещений обойм 4,5 и шаблона 12. Если, например, измеряемый участок ограни13959342
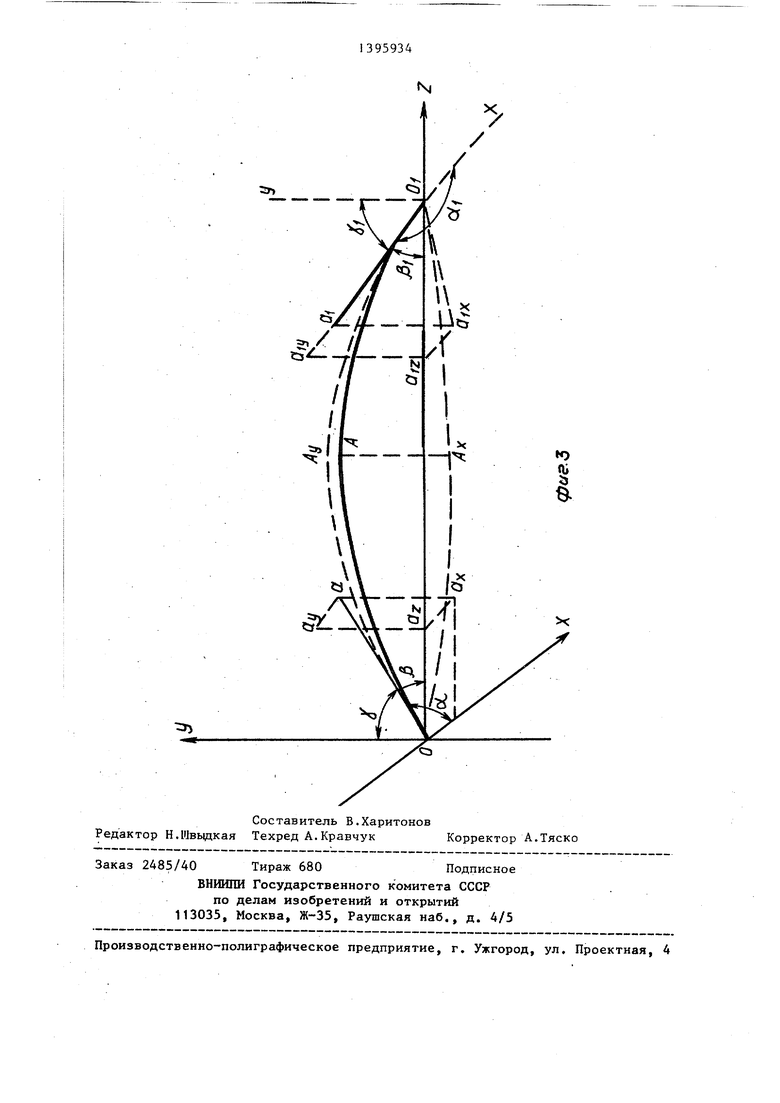
чен Кривой ОА01, имеет начало в точке О, а конец - в точке 01 и лежит в одной плоскости, то углы между касательными Од и 0 а, и осями координат соответственно равны р и |3, , oi иа;, J и у, . Эти углы измеряются с помощью катушек 6,7,8 и 9, которые совместно с магнитами 2 и 3 образуют датчики электродинамического типа. При этом датчики пути с обкатными роликами 10 и 11 фиксируют размеры, которые с помощью преобразователя 13 пересчитываются в длину S кривой ОА01. Сигналы с катушек 6-9 пересчитьшаются с помощью преобразователя 14 в разности проекций углов касательных Од и О,а, к кривой ОА01 на оси ортогональной системы координат по формулам
30
35
40
45
55
А, arctg (
coso6 cos и
)-arctg (
cosoi, cos л,
л arete () - arete ( V u arctg у ) arctg y ),
I ,
где , /i; и J; - углы между осями
координат и направлением касательных измеряемые t помощью катутаек 6 - 9.
Определяются также длины проекций кривой ОАО1 на координатные плоскости по формулам
G, S cos G , S S in
«i (fslf)
).
50
где S - длина кривой ОАО.,, измеряемая с помощью датчиков пути с обкатными роликами 10 и 11 .
Затем с помощью вычислительного блока 15 определяются координаты центра и радиус кривизны кривой ОАО по формулам
R.
R iR
+ Ru + R,
где
- расстояние между обоймами 4 и 5 .
Таким образом, при перемещении корпуса 1 на выходе вычислительного блока 15 регистрируются протяженность
тельными Од и 0 а, и осями координат соответственно равны р и |3, , oi иа;, J и у, . Эти углы измеряются с помощью катушек 6,7,8 и 9, которые совместно с магнитами 2 и 3 образуют датчики электродинамического типа. При этом датчики пути с обкатными роликами 10 и 11 фиксируют размеры, которые с помощью преобразователя 13 пересчитываются в длину S кривой ОА01. Сигналы с катушек 6-9 пересчитьшаются с помощью преобразователя 14 в разности проекций углов касательных Од и О,а, к кривой ОА01 на оси ортогональной системы координат по формулам
arctg (
coso6 cos и
)-arctg (
cosoi, cos л,
);
л arete () - arete ( V u arctg у ) arctg y ),
I ,
где , /i; и J; - углы между осями
координат и направлением касательных, измеряемые t помощью катутаек 6 - 9.
Определяются также длины проекций кривой ОАО1 на координатные плоскости по формулам
G, S cos G , S S in
«i (fslf)
).
где S - длина кривой ОАО.,, измеряемая с помощью датчиков пути с обкатными роликами 10 и 11 .
Затем с помощью вычислительного блока 15 определяются координаты центра и радиус кривизны кривой ОАО по формулам
50
R.
R iR
+ Ru + R,
где
- расстояние между обоймами 4 и 5 .
Таким образом, при перемещении корпуса 1 на выходе вычислительного блока 15 регистрируются протяженность
31395934
и форма исследуемого шаблона 12, ко- ях. Устройство может быть также ис- торые могут быть использованы при пользовано и для определения формы изготовлении труб в цеховых услови- готовых труб.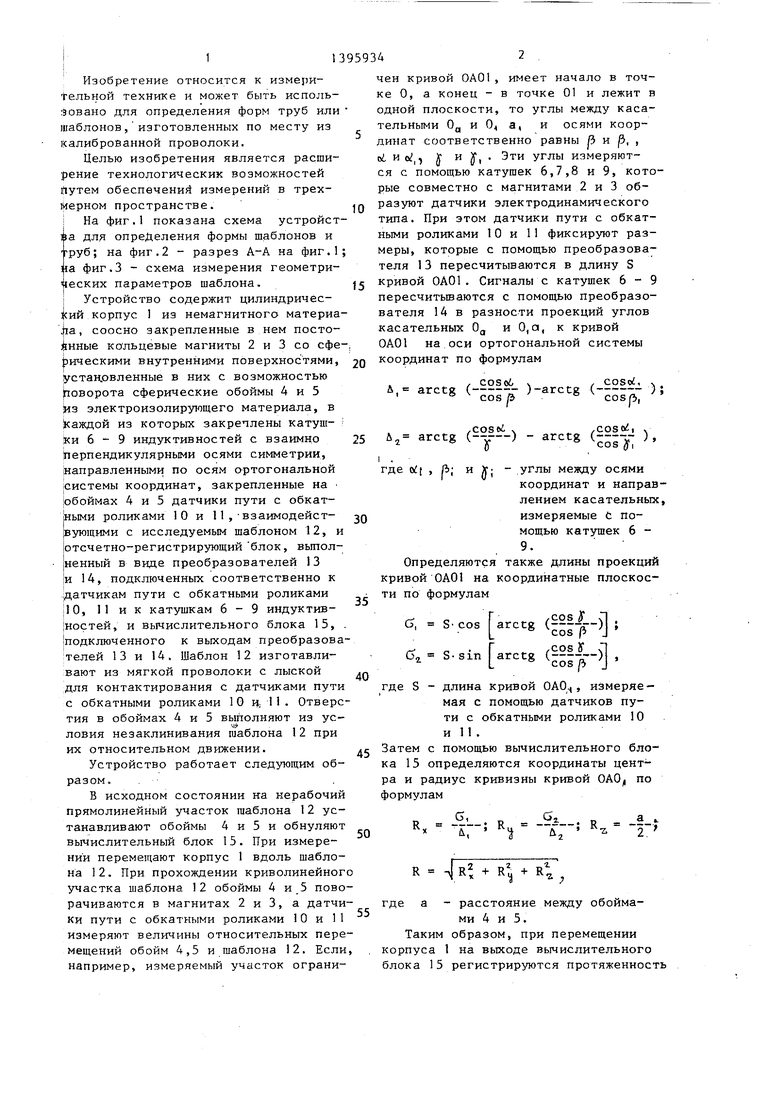
| название | год | авторы | номер документа |
|---|---|---|---|
| Зубчатая муфта | 1988 |
|
SU1590735A1 |
| Способ обработки сложных поверхностей | 1986 |
|
SU1393548A1 |
| Способ преобразования угла поворота вала фазовращателя в код | 1986 |
|
SU1458973A1 |
| Зубчатая передача | 1983 |
|
SU1359522A1 |
| Устройство для записи и воспроизведения информации с магнитооптического носителя | 1990 |
|
SU1797148A1 |
| Устройство для сбора и преобразования морской сейсмической информации | 1986 |
|
SU1472856A1 |
| Ролик для ротационного выдавливания | 1985 |
|
SU1310048A1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВАРИЙНЫХ УСЛОВИЯХ | 2019 |
|
RU2725640C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ОБЪЕКТА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ | 2016 |
|
RU2629691C1 |
| Устройство для гибки панелей с поясными усилениями | 1987 |
|
SU1449179A1 |

15
14
фиг.1
оэи.г.2
| Патент CI IA № 3882606, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
