V, arctg
Ipcosc - -l--ll -{ l.,,r,,,,,,.)
W +7 sin(arctg-7 () - hp
1 p
(1)
arctg I lp(l- cos X) + la-2fH since J/W,(2) 5
де л Ic ..(H-h)
te jj, ;
H
0(
u-H+h 1
-7(рад)
t H
необходимая величина абсолютной деформации торцового сжатия f
требуемый угол загиба,
5
0
ления I при изгибе до угла загиба (X :
1Э -2Р sino ;
горизонтальное смещение каждого торца усиления, создающее абсолютную величину сжатия Д1с по направлению касательной, проходящей под углом 0( к горизонту (фиг. 4):
15
горизонтальное смещение каждого торца от поворота рычага 1р на угол 0( :
20
Отсюда
1р(1 - COSO().
tgo(2 
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДВУСТОРОННЕЙ ГИБКИ | 1996 |
|
RU2101113C1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ СФАЛЬЦОВАННЫХ ПЕЧАТНЫХ ЛИСТОВ | 1990 |
|
RU2057029C1 |
| Устройство для поддержания заготовки в процессе обработки | 1987 |
|
SU1489882A1 |
| Устройство для завальцовки кромок металлического листа | 1976 |
|
SU651872A1 |
| Устройство для гибки петли из проволоки | 1980 |
|
SU910290A1 |
| Цепная передача | 1986 |
|
SU1567828A1 |
| Установка для вертикального перемещения штучных грузов | 1988 |
|
SU1671556A1 |
| Устройство для стяжки ленточных магнитопроводов | 1984 |
|
SU1191959A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ИЗ ДЛИННОМЕРНОГО МАТЕРИАЛАВСЕСОЮЗНАЯ11Я?|1Т§10-ТЕХНН'{?01! | 1972 |
|
SU332902A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ И ФИКСИРОВАНИЯ ЗАГОТОВОК | 1995 |
|
RU2080229C1 |
Изобретение относится к обработке металлов давлением,в частности к оборудованию для гибки монолитных панелей одинарной кривизны с поясньми усилениями. Цель изобретения - повышение точности путем предотвращения образования седловидности. Устройство содержит станину 1, шаблон-прижим 5, закрепленный на подвижном портале 4, поворотные рычаги 3 с гибочными элементами. Каждьш поворотный рычаг снабжен механизмом перемещения гибочного элемента. Последний выполнен в вице толкателя 9, размещенного в направляющей 2, установленной на станине. Толкатель 9 одним концом шарнирно соединен с рычагом 3, а другим контактирует со сменным клиновым копиром 8. Поворотный рычаг 3 дополнительно снабжен роликом 6, который взаимодействует с рабочей поверхностью сменного клинового копира 7. При перемещении портала 4 вниз рычаг 3 осуществляет горизои- тальное смещение с поворотом. 4 нл. 9 (Л
1Э - ширина панели; н - радиус кривизны
срединного слоя полотна панели в кон це активной стадии деформирования, 2h - толщина полотна
панели; 2Н - толщина усиленной
части панели,
1р , hp - геометрические параметры гибочного инструмента;
W - рабочий ход портала .
Углы клиновидности копиров 7 и 8 должны обеспечивать при заданном рабочем ходе W портала 4: поворот рычага 3 на требуемый угол загиба детали (X; сжатие торцов изгибаемого усиления до величины абсолютной деформации & 1с (на каждый торец), определяемой по формуле
,-. o(H-h) (е -г).
Н
-1
При этом рычаги 3 совершают сложное движение - горизонтальное смещение с поворотом, что необходимо учесть при определении углов клиновидности копиров 7 и 8.
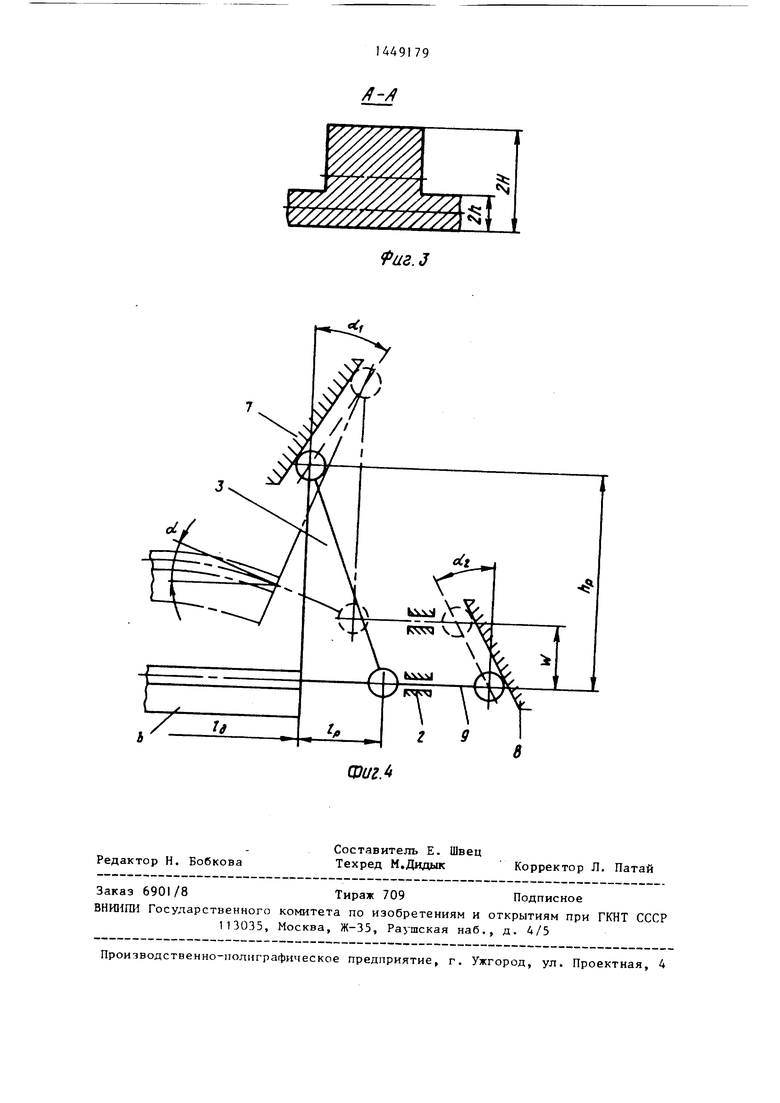
Тангенс угла клиновидности оС определяется, как отнощение величины горизонтального смещения толкателя 9 к рабочему ходу W портала 4. Горизонтальное смещение толкателя 9 состоит из трех слагаемых: горизонтальное смещение каждого торца уси1р (1 - cosO()
1Э -j HsineK - + 2 coso(
25
.,„
5
0
5
0
5
W
Тангенс угла клиновидности о( определяется, как отношение величины горизонтального смещения ролика рычага 3 к его вертикальному смещению на рабочем ходе W портала 4 (фиг.4) Вертикальное смещение состоит из двух слагаемых: рабочий ход W и вертикальное смещение ролика от поворота рычага 3 на угол о( (центр вращения - ось шарнирного соединения толкателя 9 и гибочного инструмента 3):
+ .cos 90° - (arctg- + 5 )hp -J 1р2 + h p-sin(arctg-i -H:) - hp.
IP
Горизонтальное смещение ролика гибочного инструмента 3 состоит из следующих слагаемых: горизонтальное смещение ролика от поворота рычага 3 на угол
1р /l p-bh p-sin(arctg - - о ) ,
горизонтальное смещение толкателя 9 (со знаком минус) определенное ранее
13- Рн sine Д1с
-lp(l-cosc/) cosai
Тогда тангенс угла клиновидности o -i определяется так
I-7Г , IP ч 1 1 It sina/
IP - V 1 p.sin(arctg ip- -o)- 1р(1-со5л),
tge ,W + h p sin(arctg +c/) - hp
lp,,, lA::±- -5ln - IIVn;% sin(arctgiH--c)
COSoi
W + + h p sin(arctg y «) hp
При изменении ширины 1 изгибаемой панели смещают по горизонтали на соответствуютие расстояния копиры 7 и 8 например,с помощью техноло- г ических прокладок и направлявшие 2.
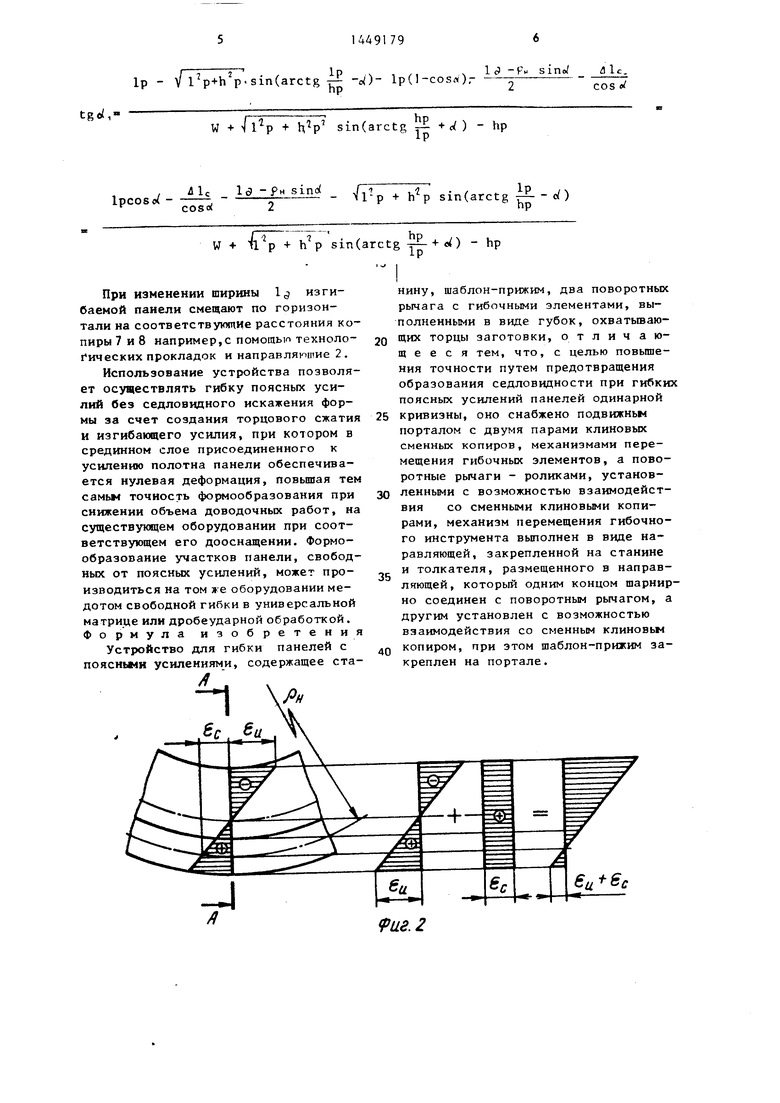
Использование устройства позволяет осуществлять гибку поясных усилий без седловидного искажения формы за счет создания торцового сжатия И изгибающего усилия, при котором в срединном слое присоединенного к усилению полотна панели обеспечивается нулевая деформация, повьппая тем самым точность формообразования при снижении объема доводочных работ, на существующем оборудовании при соответствующем его дооснащении. Формообразование участков панели, свободных от поясных усилений, может производиться на том е оборудовании ме- дотом свободной гибки в универсальной матрице или дробеударной обработкой. Формула изобретения
Устройство для гибки панелей с поясньми усиленнями, содержащее ста- /
А
Д1с. COS K/
0
5
0
5
0
Нину, шаблон-прижим, два поворотных рьгчага с гибочными элементами, выполненными в виде губок, охватьшаю- щих торцы заготовки, отличающееся тем, что, с целью повьше- ния точности путем предотвращения образования седловидности при гибких поясных усилений панелей одинарной кривизны, оно снабжено подвижньи порталом с двумя парами клиновых сменных копиров, механизмами перемещения гибочньк элементов, а поворотные рычаги - роликами, установ- ленньмн с возможностью взаимодействия со сменными клиновыми копирами, механизм перемещения гибочного инструмента вьтолнен в виде на- равляющей, закрепленной на станине и толкателя, размещенного в направляющей, который одним концом шарнир- но соединен с поворотным рычагом, а другим установлен с возможностью взаимодействия со сменньм клиновьм копиром, при зтом шаблон-прижим закреплен на портале.
иг.2
faa.d
| Датчик давления | 1989 |
|
SU1652838A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| I | |||
