со со о
о
Oi bO
//I
фигл
Изобретение относится к измерительной технике и может быть использовано при серийном производстве электроизмерительных приборов с креплением си- стемы на растяжках.
Целью изобретения является повышение точности.
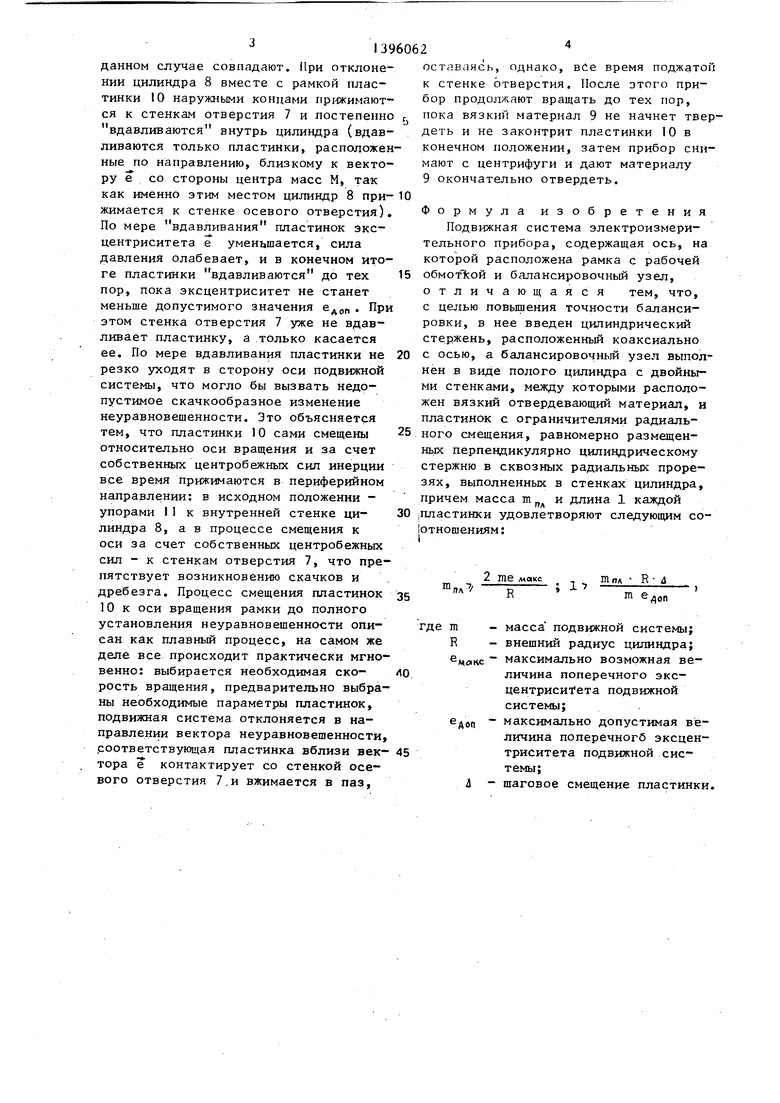
На фиг. 1 схемат1гчно изображена подвижная система с центральным раз- резом, вид спереди; на фиг. 2 - то же, вид сверху.
Подвижная система электроизмерительного прибора содержит рамку 1;, установленную на растяжках 2 и рас- положенную в рабочем зазоре 3 магнитной системы, образованной постоянт.М магнитом 4 и внутрирамочным сердечником 5, В рамке 1гмеется централь- ньй цилиндрический стержень 6, проходящий сквозь выполненное в сердечнике 5 сквозное осевое отверстие 7. На рамке 1 установлен балансировочньш узел, выполненньй в виде концентрич- но закрепленного на стержне через осевое отверстие в дне полого цилиндра 8, имеющего двойные стенки с зазором между ними, заполненным вязким отвердевающим материалом 9. В стенках цилиндра равномерно по окружности выполнены сквозные радиальные прорези, в .которые свободно вставлены л:е- жащие в осевой плоскости пластинки 10, имекщие ограничители II радиапь- ного смещения в периферийном направ- лении (упоры), причем пластинки вйтавлены так, что их наружные и внутренние концы расположены соотв€;т- ственно в радиальных зазорах между внешней стенкой цилиндра и стенкой осевого отверстия в сердечнике и внутренней стенкой цилиндра и стержнем. Конструктивные параметры пластинок (масса m5л и 1 - длина) выбраны с помощью расчетных соотношений:
2 те макс
П1„. 7/ ;:;
пл
2 m пл R л
1
те
Аоп
где ш - масса подвижной системы; R - внешний радиус цигшндра; е ис и е . j - максимально возможная и максимально допустимая величины поперечно- го эксцентриситета подвижной cиcтe; ы;
и - практически реализуемое минимальное (шаговое) смещение пластинки.
Автоматическая балансировка подвижной системы осуществляется следу- ющим образом.
В исходном положении (фиг. 1) пластинки 10 вставлены в пазы в стенках цилиндра 8 до упоров 11, при этом с внешней стороны пластинки немного не доходят до стенок отверстия 7 во внутрирамочном сердечнике. Расстояние между внутренним концом пластинки 10 и стержнем 6 таково, что пластинка может практически полностью вдавиться с наружной стороны внутрь цилиндра 8, при этом ее наруж- ньй конец будет практически заподлицо с внешней стенкой цилиндра 8.
Балансируемьш прибор устанавливается в вертикальном положении на платформу центрифуги так, чтобы ось вращения совпала с осью подвижной системы. Центрифуга вместе с прибором приводится во вращение с угловой скоростью п, определяемой по формуле
(3)
где ы - собственная частота поперечных колебаний подвижной системы; c/ -i (радиальный зазор между внещней- стен-
- о
кои цилиндра о и стенкой осевого отверстия 7 в сердечнике 5 (фиг. I). Данная скорость обеспечивает балансировку подвижной системы с заданной . точностью. Так как центр масс М подвижной системы (фиг. 2) в общем случае не совпадает с ее осью вращения С на величину вектора поперечного эксцентриситета е, то при вращении возникают центробежные силы инерции, пропорциональные величине эксцентриситета е и вызьшающие отклонение подвижной СИСТЕМЫ на растяжках от оси вращения в направлении вектора е. Так как поперечная жесткость подвижной системы на растяжках много больше крутильной, то отклонение по всей высоте рамки 1 происходит практически на одну и ту же величину, т.е. цилиндр 8 перемещается поступательно в направлении вектора е . Месторасположение пластинок 10 по высоте рамки поэтсаду безразлично, статическая и динамическая балансировки в
данном случае совпадают. При отклонении цилиндра 8 вместе с рамкой пластинки 10 наружными концами прижимаются к стенкам отверстия 7 и лостепеино вдавливаются внутрь цилиндра (вдавливаются только пластинки, расположенные по направлению, близкому к вектору е со стороны центра масс М, так как именно этим местом цилиндр 8 при- жимается к стенке осевого отверстия). По мере вдавливания пластинок эксцентриситета е уменьшается, сила давления олабевает, и в конечном итоге пластинки вдавливаются до тех
пор, пока эксцентриситет не станет меньше допустимого значения ,n При этом стенка отверстия 7 уже не вдавливает пластинку, а только касается ее. По мере вдавливания пластинки не резко уходят в сторону оси подвижной системы, что могло бы вызвать недопустимое скачкообразное изменение неуравновешенности. Это объясняется тем, что пластинки 10 сами смещены относительно оси вращения и за счет собственных центробежных сил инерции все время прижимаются в периферийном направлении: в исходном положении - упорами I1 к внутренней стенке цилиндра 8, а в процессе смещения к оси за счет собственных центробежных сил - к стенкам отверстия 7, что препятствует возникновению скачков и дребезга. Процесс смещения пластинок 10 к оси вращения рамки до полного установления неуравновешенности описан как плавный процесс, на самом же деле все происходит практически мгновенно: выбирается необходимая ско- рость вращения, предварительно выбраны необходимые параметры пластинок, подвижная система отклоняется в направлении вектора неуравновешенности соответствующая пластинка вблизи век- тора е контактирует со стенкой осевого отверстия 7,и вжимается в паз.
( 015
0
25
35 ЛО 45
оставаясь, однако, вСе время поджатой к стенке отверстия. После этого прибор продолжают вращать до тех гюр, пока вязкий материал 9 не начнет твердеть и не законтрит пластинки 10 в конечном положении, затем прибор снимают с центрифуги и дают материалу 9 окончательно отвердеть.
Формула изобретения Подвижная система электроизмерительного прибора, содержащая ось, на которой расположена рамка с рабочей обмот ой и балансировочный узел, отличающаяся тем, что, с целью повышения точности балансировки, в нее введен цилиндрический стержень, расположенный коаксиально с осью, а балансировочный узел выполнен в виде полого цилиндра с двойными стенками, между которыми расположен вязкий отвердевающий материал, и пластинок с ограничителями радиального смещения, равномерно размещен- ньк перпендикулярно цилиндрическому стержню в сквозных радиальных прорезях, выполненных в стенках цилиндра, причем масса m „. и длина 1 каждой
1 п
30 (Пластинки удовлетворяют следующим со- отношениям:
m пл R л
m е
qon
де m R е
масса подвижной системы; внешний радиус цилиндра; максимально возможная величина поперечного эксцентриситета подвижной системы;
максимально допустимая величина поперечногб эксцентриситета подвижной системы;Л - шаговое смещение пластинки.
-доп
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвижная система магнитоэлектрического прибора | 1986 |
|
SU1347020A1 |
| Подвижная система электроизмерительного прибора | 1978 |
|
SU805774A1 |
| Подвижная система электроизмерительного прибора | 1989 |
|
SU1677646A1 |
| Устройство для ограничения колебаний подвижной системы электроизмерительного прибора | 1985 |
|
SU1272255A2 |
| МАГНИТОИНДУКЦИОННЫЙ УСПОКОИТЕЛЬ ПОПЕРЕЧНЫХ КОЛЕБАНИЙ | 1996 |
|
RU2143119C1 |
| ПОДВИЖНАЯ СИСТЕМА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИБОРА | 1997 |
|
RU2144677C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ МЕХАНИЗМ | 1996 |
|
RU2117301C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ МЕХАНИЗМ | 1996 |
|
RU2118825C1 |
| ЭЛЕКТРОИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1969 |
|
SU236620A1 |
| Подвижная система магнитоэлектрического измерительного прибора и способ ее балансировки | 1984 |
|
SU1226315A1 |

Изобретение может быть использовано в серийном производстве электроизмерительных приборов с креплением системы на растяжках. Подвижная система (ПС) электроизмерительного прибора содержит рамку 1 на растяжках 2, магнитную систему с рабочим зазором 3, цилиндрический стержень 6, про- проходящий сквозь сквозное осевое отверстие 7 сердечника 5, балансировочный узел в виде полого цилиндра (ПЦ) 8 с двойными стенками, между которыми находится вязкий отвердевающий материал. В стенках ПЦ 8 равномерно по окружности имеются сквозные радиальные прорези, в которые вставлены в осевой плоскости пластинки 10 с ограничителями 11, масса т „к и длила 1 которых т,,. 2 гае мякс/R; 1 m „л X R и /т е АОП где m - масса ПС; R внешний радиус цилиндра; ,.и fton - максимально возможная и максимально допустимая величины поперечного эксцентриситета ПС; А - шаговое смещение пластинки 10, ПС имеет повышенную точность. 2 ил. сл с
cpue.Z
| Подвижная система магнитоэлектрического измерительного прибора и способ ее балансировки | 1984 |
|
SU1226315A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
