Z Фнг.}
производят по амплитуде переменного напряжения в рабочей обмотке. При этом первый поворот осуществляют вокруг оси подачей линейно возрастающего напряжения в рабочзто обмотку до достижения максим пма амплитуды переменного напряжения. Второй повоИзобретение относится к измерительной технике и может быть использовано при производстве электроизмерительных приборов магнитоэлектрической системы.
Цель изобретения -- повьшение точности балансировки подвижной системы .за счет минимизации конечного небаланса масс и одновременное упрош;енне процесса балансировки, повьицение ,его производительности за счет исключения многократно повторяющихся операций и автоматизации.
На изображена предлагаемая подвижная системаэ на фиг.2 - вид А на фиг, 1 э на - схема устройства для реализации способа балансировки.
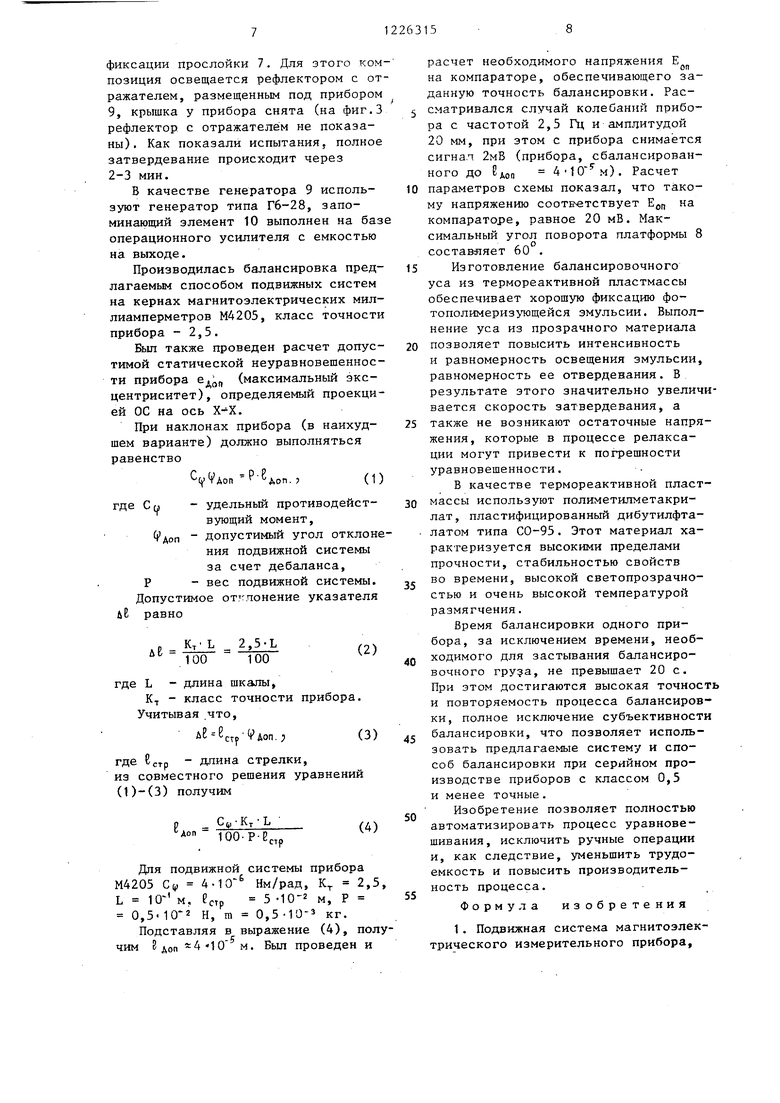
Подвижная система (фиг.1) содер- ;жит закрепленную на оси t рамку 2 с рабочей обмоткой, стрелку 3 и укрепленный на рамке 2 с помошью держателя 4 плоский балансировочнь5й ус
5,изготовленный из прозрачной термореактивной пластмассы, йблизи удаленного от оси 1 конца которого выполнено полусферическое углз бленке
6,заполненное прослойкой 7 фото- полимеризующейся светочувствительной эмульсии.
В качестве прозрачной термореактивной пластмассы применяют поли™ метилметакрилат, в качестве светочувствительной эмульсии - композицию ЭСДП 5 на основе эпоксидной смолы ЗД-20з используемую, например, для заливки электроузлов, склеивания пластмасс и изготовления сборных клише,
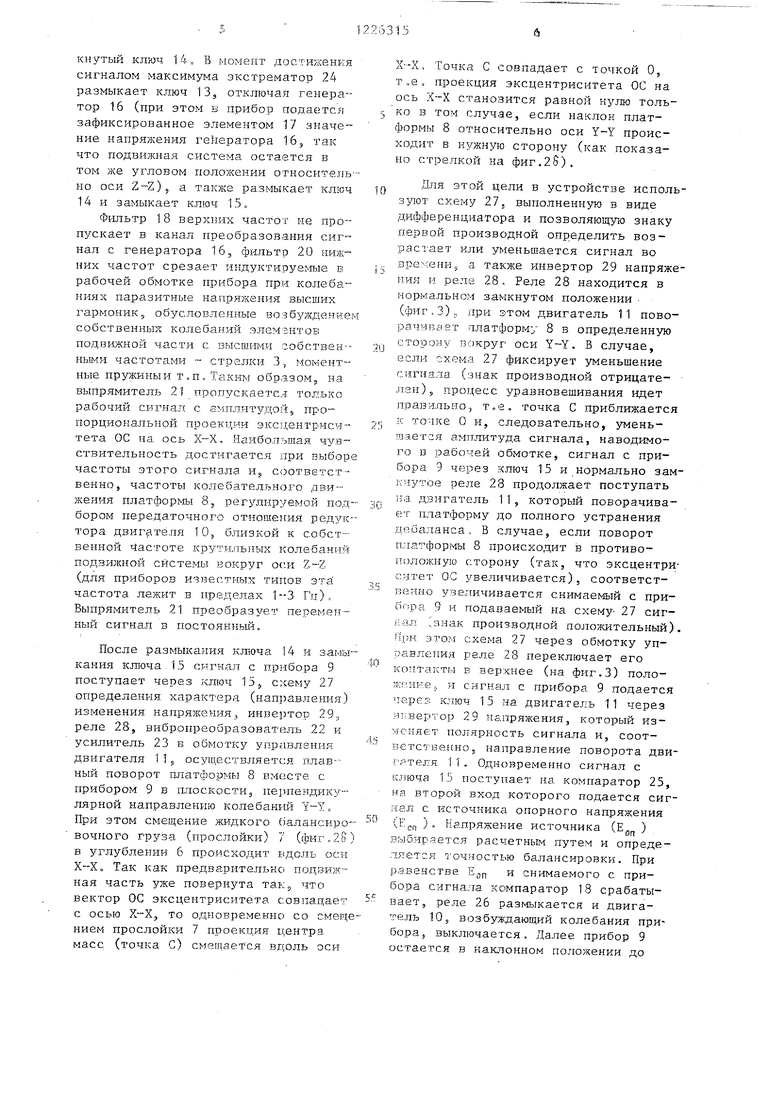
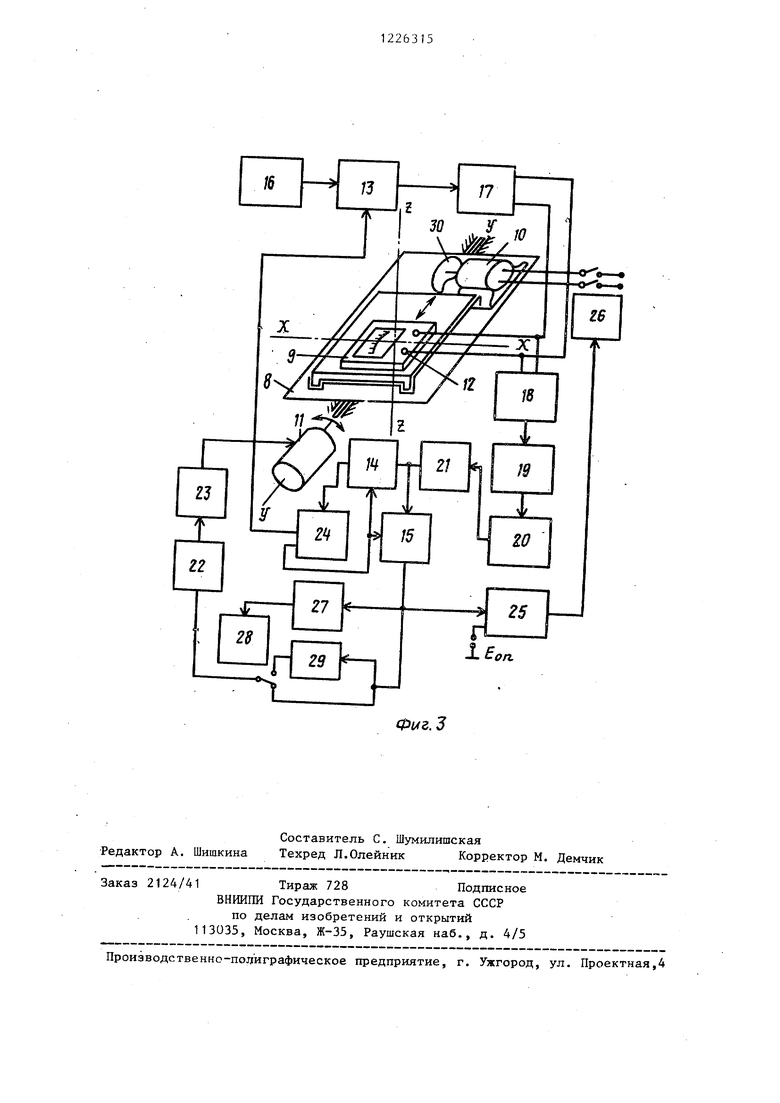
При осуществлении автоматической балансировки в процессе производства используют устройство (фиг.З),
пендикулярной направлению колебаний, до достилсения заданного минимального значения амплитуды переменного напряжения. г иксацию балансировочного груза производят воздействием светового излучения.2 с,п. ф-лы, 3 ил.
I
0
5,
5
0
содержащее платформу 8 для закрепления прибора 9 и сообщающего ему возвратно-поступательные колебания двигателя 10, установленнзто с возможностью поворота в перпендикулярной направлению колебаний плоскости с помощью двигателя 11, блок измерения небаланса масс, включающий параллельно подключенные к входным клеммам 12 прибора 9 с помощью коммутатора, выполненного в виде отдельных ключей 13-155 генератор 16 пилообразного (линейно нарастающего) напряжения с запоминающим элементом 17, а также канал преобразования и усиления сигнала, состоящий КЗ фшЕьтра 18 нерхних частот,усилителя 19 постоянного тока, фильтра 20 нижних частот, выпрямителя 21, вйбропреобразователя 22 и усилителя 23, выход которого подключен. :с обмотке управления двигателя 11, схему 24 фиксации максимального уровня снимаемого с прибора напряжения; выполненную в виде экстремато- pa.s, схему фиксации заданного, соот- ветствуюш;его допустимой неуравновешенности, уровня снимаемого с прибора напряжения, выполненную в виде компаратора 25 с выходом, связанным через реле 26 с обмоткой воз- бууэдения двигателя 10, и схему 27 определения характера изменения напряжения, подк,шоченную через реле 28 к инвертору 29 напряжения.
Под); ижн:ая система работает сле- дую111;им образом.
Подвижная система размещается на опорах в постоянном магнитном поле. При подаче тока в рабочую обмотку рамки 2 возникает вращающий момент, под действием которого рамка 2 со стрелкой 3 поворачиваются
3
вокруг оси 1 на угол, пропорциональные величине тока в рабочей обмотке рамки 2 при наличии противо- действующего момента.
Балансировку предлагаемой подвиж ной системы осуществляют следующим образом (фиг.1 и 2),
Подвижную систему или прибор 9 с подвижной системой устанавливают в вертикальное положение так, чтобы ось 1 заняла положение Z-Z, сообщают прибору 9 возвратно-поступательные колебания в перпендикулярной оси вращения подвижной системы плоскости (в направлении оси Y-Y на фиг.2а), одновременно контролируют неуравновешенность по величине наводимого в рабочей обмотке рамки 2 переменного электрического напряжения, пропорционального проекции ста тического эксцентриситета ОС на ось Х-Х. Подачей в рабочую обмотку рамки 2 линейно возрастающего по величне напряжения осуществляют плавнЕЛЙ поворот подвижной системы вокруг оси Z-Z (на фиг.2а показан стрелкой фиксируют момент достижения переменным напряжением в рабочей обмотке рамки 2 максимального значения (что соответствует совпадению вектора ОС с осью Х-Х, фиг.25), после чего поворот вокруг оси Z-Z прекращают и смещают прослойку 7 (балансировочны груз) вдоль оси Х-Х в нужную сторону путем поворота прибора 9 в перпе дикулярной направлению колебаний плоскости (вокруг оси Y-Y на фиг.2 как показано стрелкой). Указанный поворот прекращают в. момент достижения переменным напряжением в рабочей обмотке рамки 2 заданного,соответствующего допустимому небаланс масс, уровня, после чего фиксируют прослойку 7 путем интенсивного освещения в течение необходимого для полимеризации прослойки 7 промежутка времени.
Рассмотрим, например, процесс автоматической балансировки предлагаемой подвижной системы с помощью предлагаемого устройства.
Прибор 9 со снятой крьшкой (на фиг.З показан с закрытой крьшкой) закрепляется на платформе 8. При подаче постоянного напряжения через нормально замкнутые контакты реле 26 в обмотку возбуждения двигателя 10 последний через редуктор (не по
5
10 15 20 5
0
5
0
5
0
315 4
казан) и кулачок 30 сообщает прибору 9 возвратно-поступательные колебания в направлении оси Y-Y (фиг.2). При этом в рабочей обмотке рамки 2 прибора магнитоэлектрической системы, расположенной в рабочем зазоре постоянного магнита, наводится переменное электрическое напряжение с амплитудой, пропорциональной проекции статического эксцентриситета ОС (фиг.2) на оси Х-Х. Эксцентриситет ОС, лежащий в любой из поперечных плоскостей, перпендикулярных оси Z- Z поворота подвижной части, определяет ее статическую неуравновешенность или небаланс масс на фиг.2 эксцентриситет ОС показан в плоскости, совпадающей с верхней стороной рамки 2 подвижной части, здесь О - геометрический центр подвижной системы, С - проекция центра масс подвижной системы на поперечную плоскость).
Наводимо.е в рабочей обмотке прибора 9 напряжение снимается с выходных клемм 12 (фиг.З) и поступает в канал преобразования и усиления сигнала, состоящий из фильтра 18 верхних частот, усилителя 19 постоянного тока, фильтра 20 нижних частот и выпрямителя 21.
Одновременно с включением двигателя 10, сообщающего прибору поступательные колебания, замыкаются ключи 13 и 14 (ключ 15 в начальный момент разомкнут). Через замкнутый ключ 13 к клеммам 12 прибора одновременно с каналом преобразования и усиления сигнала подключается через запоминающий элемент 17 генератор 16 пилообразного -напряжения. Плавно увеличивающийся сигнал генератора 16, подаваемый в рабочую обмотку рамки 2, вызывает плавный поворот подвижной системы прибора 9 вокруг оси Z-Z (на фиг.2 а показан по часовой стрелке). При повороте происходит изменение проекции эксцентриситета ОС на ось Х-Х, определяющей амготи- туду наводимого в рабочей обмотке сигнала.
При совпадении ОС с осью Х-Х амплитуда сигнала в рабочей обмотке прибора 9 максимальна. Для фиксации этого момента служит схема 24, выполненная в виде экстрематора, в которую сигнал с рабочей обмотки после выпрямителя 21 поступает через замкнутый ключ 14, В момент достижения сигналом максимума экстрематор 24 размыкает ключ 3 отключая генератор 16 (при этом в прибор подается зафиксированное элементом 17 значение напряжения генератора 16j так что подвилшая система остается в том же угловом положении относительно оси Z -Z), а также размыкает ключ 14 и замыкает ключ 15.
Фильтр 18 верхних частот не пропускает в канал преобразования сигнал с генератора 16, фильтр 20 нижних частот срезает индуктируемые в рабочей обмотке прибора при колебаниях паразитные напряжения высяшх гармоник 5 обусловленные возбуждением собственных колебаний злемантов подвижной части с высптшчи собствен-- нь ми частотами - стрелки 3, момент- пые пружины и т.п. Таким образом, на выпрямитель 21 пропускается только рабочий сигнал с амплитудойj про- пордиональной проекции эксцентриситета ОС на ось Х-Х, Наибольшая чувствительность достигается яри частоты этого сигнала н соответственно, частоты колебательного ,ави- женин платформь 8, регулируемой подбором передаточного отношемия редз ктора двигателя 10, близкой к собственной Частоте крутильных колебаний подвижной системы вокруг оси Z-Z (для приборов известных типов эта: частота лежит в пределах 1--3 Гп), Выпрямитель 21 преобразует переменный сигнал в постоянный.
После размыкания ключа 14 и замы кания ключа 15 сигнал с прибора 9 поступает через ключ 15, схему 27 определения характера (нап1)авления) изменения напряжения, инвертор 29, реле 28, вибропреобразоватвль 22 и усилитель 23 в обмотку управления двигателя 11, осуществляется плавный поворот платформы 8 вместе с прибором 9 в плоскости, перпендикулярной направлению колебаний Y--Y, При этом смещение жидкого балансиро ночного груза (прослойки) 7 (фиг „2 В в углублении 6 происходит вдоль оси Х-Хо Так как предварительно подвижная часть уже повернз та так, что вектор ОС эксцентриситета совпадает с осью Х-Х, то одновременно со смещнием прослойки 7 проекция центра масс, (точка С) смвишется вдоль оси
Х--Х, Точка С совпадает с точкой О, т.е проекция эксцентриситета ОС на ось Х-Х становится равной нулю только в том случае, если наклон платформы 8 относительно оси Y-Y происходит в нужную сторону (как показано стрелкой на фиг,2&).
Для этой цели в устройстве используют схему 27;. выполненную в виде дифференциатора и позволяющую знаку первой производной определить воз- или уменьшается сигнал во времени., а также инвертор 29 напряжения и реле 28. Реле 28 находится в нормальном замкнутом положении . (фиг.З), при этом двигатель 11 пово- рачигзает платформу 8 в определенную сторону тзокруг оси Y-Y. В случае, если схема 27 фиксирует уменьшение сигнала (знак производной отрицате- лан), процесс уравновешивания идет правильно, т,е, точка С приближается к точке О и, следовательно, уменьшается амплитуда сигнала, наводимого в рабочей обмотке, сигнал с прибора 9 через ключ 15 и нормально зам- кн-утое реле 28 продолжает поступать на двигатель 11, который поворачивает платформу до полного устранения дебаланса. В случае, если поворот платформы 8 происходит в противо- поло;кную сторону (так, что эксцентриситет ОС увеличивается)5 соответст- веннс увеличивается снимаемый с при- бпра 9 и подаваемый на схему- 27 сиг- 1;,ал ,знак производной положительный). Upi-r этом схема 27 через обмотку управления реле 28 переключает его контакты в верхнее (на фиг.З) поло- ЖР.НК6,, и сигнал с прибора 9 подается через ключ 15 на двигатель 11 через HiiBeiyrop 29 напряжения, который изменяет полярность сигнала и, соот- ветса 1зенно, направление поворота дви- г ртеяя 1 1 . Одновременно сигнал с ключа 15 поступает на компаратор 23, на второй вход которого подается сигнал с источника опорного напряжения чЕрп ) Н апряжение источника (Е ) выбирается расчетным путем и определяется точностью балансировки. При равенстве Едп и снимаемого с прибора сигнала компаратор 18 срабатывает, реле 26 разгфжается и двигатель 10, возбуждаюгций колебания прибора, выключается. Далее прибор 9 остается в нак:аонном положении до
фиксации прослойки 7. Для этого ком позиция освещается рефлектором с отражателем, размещенным под прибором 9, крышка у прибора снята (на фиг.З рефлектор с отражателем не показаны) . Как показали испытания, полное затвердевание происходит через 2-3 мин.
В качестве генератора 9 исполь- зуют генератор типа Гб-28, запоминающий элемент 10 выполнен на баз операционного усилителя с емкостью на выходе.
Производилась балансировка пред- лагаемым способом подвижных систем на кернах магнитоэлектрических миллиамперметров М4205, класс точности прибора - 2,5.
Был также проведен расчет допус- тимой статической неуравновешенности прибора едд (максимальный эксцентриситет), определяемый проекцией ОС на ось Х-Х.
При наклонах прибора (в наихуд- шем варианте) должно выполняться равенство
., (1)
где Со - удельный противодейст-
вующий момент,
доп допустимьй угол отклонения подвижной системы за счет дебаланса,
Р - вес подвижной системы. Допустимое от. глонение указателя 4Е равно
р Кт L 2,5-L 100 100
где L - длина шкалы,
К - класс точности прибора. Учитывая .что,
йе е„ 9доп.; (3)
где бстр - длина стрелки,
из совместного решения уравнений
(1)-(3) получим
Р - С) KT L ° 100-Р-Е„р
Для подвижной системы прибора М4205 С If 4-10 Нм/рад, К 2,5, L 10- м. Естр 5 -10-2 м, Р 0,5-10-2 н, m 0,5-10- кг.
Подставляя в выражение (4), получим доп 4«10 м. Был проведен и
-
10 е
is
20 25
зо
40
45
50
55
расчет необходимого напряжения Е на компараторе, обеспечивающего заданную точность балансировки. Рассматривался случай колебаний прибора с частотой 2,5 Гц и амплитудой 20 мм, при этом с прибора снима ется сигнал 2мВ (прибора, сбалансированного до Вдоп 4 10 м). Расчет параметров схемы показал, что такому напряжению соответствует Е, на компараторе, равное 20 мВ. Максимальный угол поворота платформы 8 составляет 60 .
Изготовление балансировочного уса из термореактивной пластмассы обеспечивает хорошую фиксацию фо- тополимеризующейся эмульсии. Выполнение уса из прозрачного материала позволяет повысить интенсивность и равномерность освещения эмульсии, равномерность ее отвердевания. В результате этого значительно увеличивается скорость затвердевания, а также не возникают остаточные напряжения, которые в процессе релаксации могут привести к погрешности уравновешенности.
В качестве термореактивной пластмассы используют полиметилметакри- лат, пластифицированный дибутилфта- латом типа СО-95. Этот материал характеризуется высокими пределами прочности, стабильностью свойств во времени, высокой светопрозрачно- стью и очень высокой температурой размягчения.
Время балансировки одного прибора, за исключением времени, необходимого для застывания балансировочного , не превышает 20 с. При этом достигаются высокая точность и повторяемость процесса балансировки, полное исключение субъективности балансировки, что позволяет использовать предлагаемые систему и способ балансировки при серийном производстве приборов с классом 0,5 и менее точные.
Изобретение позволяет полностью автоматизировать процесс уравновешивания, исключить ручные операции и, как следствие, уменьшить трудоемкость и повысить производительность процесса.
Формула изобретения
1. Подвижная система магнитоэлектрического измерительного прибора.
содержащая ось, на которой располо- жена рамка с рабочей обмоткой, и держатель со стрелкой и плоским балансировочным усом, на котором размещен балансировочный груз, о т л и- чающ яяся тем, что, с целью повьнпения точности балансировки, балансировочный ус выполнен из оптически прозрачной термореактивной пластмассы с полусферическим углублением на конце, а балансировочный груз выполнен в виде прослойки фото- полимеризующейся эмульсии, расположенной в углублении балансировочного уса.
2. Способ балансировки подвижной системы магнитоэлектрического прибора, включающий предварительную ориентацию оси подвижной системы в вертикальном направлении,последовательные повороты подвижной системы двух взаимно перпендикулярных плоскостях с одновременной регистрацией неличины небаланса масс подвижной ,системы, а также заключительную фиксацию балансировочного груза, о т- личающийся тем, что, с целью повышения производительности J процесса балансировки, после ориентации оси подвижной системы в вертикальном направлении подвижной системе сообщают возвратно-поступательные колебания в плоскости, перпенди10 кулярной оси подвижной системы,при этом регистрацию величины небаланса масс подвижной системы производят по амплитуде переменного напряжения в рабочей обмотке, первый доворот
15 подвижной системы осуществляют вокруг оси подачей линейно возрастаю- щего напряжения в рабочую обмотку до достижения максимума амплитуды переменного напряжения, второй по- ,
20 ворот осуществляют в плоскости,перпендикулярной направлению колебаний, до достижения заданного минимального значения амплитуды переменного напряжения, а фиксацию балансиро25 ночного груза производят воздействием светового излучения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для статической балансировки подвижной части прибора | 1984 |
|
SU1216691A1 |
| Подвижная система электромеханического прибора | 1982 |
|
SU1033972A1 |
| Подвижная система магнитоэлектрического прибора | 1986 |
|
SU1347020A1 |
| Стенд для балансировки подвижной части электроизмерительного прибора | 1983 |
|
SU1142743A1 |
| Способ определения погрешности магнитоэлектрического прибора от неуравновешенности | 1985 |
|
SU1328760A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ МАГНИТОЭЛЕКТРИЧЕСКОГО ПРИБОРА ОТ НЕУРАВНОВЕШЕННОСТИ | 1992 |
|
RU2035741C1 |
| ПОДВИЖНАЯ СИСТЕМА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИБОРА | 1997 |
|
RU2144677C1 |
| Измеритель выходных характеристик спиральных пружин | 2016 |
|
RU2623816C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2009 |
|
RU2441211C2 |

Изобретение относится к измерительной технике. Цель изобрете- ння - повьппение точности балансировки подвижной системы. На рамке 2 с рабочей обмоткой закреплены стрелка 3 и балансировочный ус 5, на котором выполнено сферическое углубление для прослойки 7 фотополимеризующей- ся светочувствительной эмульсии. Лосле ориентации оси 1 в вертикальном направлении подвижной системе сообщают возвратно-поступательные колебания в плоскости, перпендикулярной оси 1. Регистрацию величины небаланса масс подвижной системы Пг
Направление коле5аний
Вид А
Составитель С. Шумилишская Редактор А. Шишкина Техред Л.Олейник Корректор М. Демчик
з1каз 2 24/41 Тираж
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно
-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
Ф1/г.З
| Алукер Ш.М | |||
| Электрические измерения | |||
| - М.: Колос, 1966,с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Арутюнов В.О | |||
| Расчет и конструирование электроизмерительных приборов | |||
| -М.-Л.: ГЭИ, 1956, с | |||
| Фальцовая черепица | 0 |
|
SU75A1 |
| Буловский П.И | |||
| и Лукичева А.Н | |||
| Технология и оборудование производства электроизмерительных приборов | |||
| - М., 1973, с | |||
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
