Изобретение относится к измерительной технике и может быть использовано при серийном производстве магнитоэлектрических электроизмерительных приборов с креплением подвижной системы на растяжках.
Цель изобретения - улучшение динамических характеристик подвижной системы.
На фиг,1 схематично изображена предлагаемая подвижная система, вид спереди и сверху; на фиг.2 - расчетная схема, поясняющая процесс балансировки; на фиг.З - последовательность положений подв ижной системы в процессе ее балансировки.
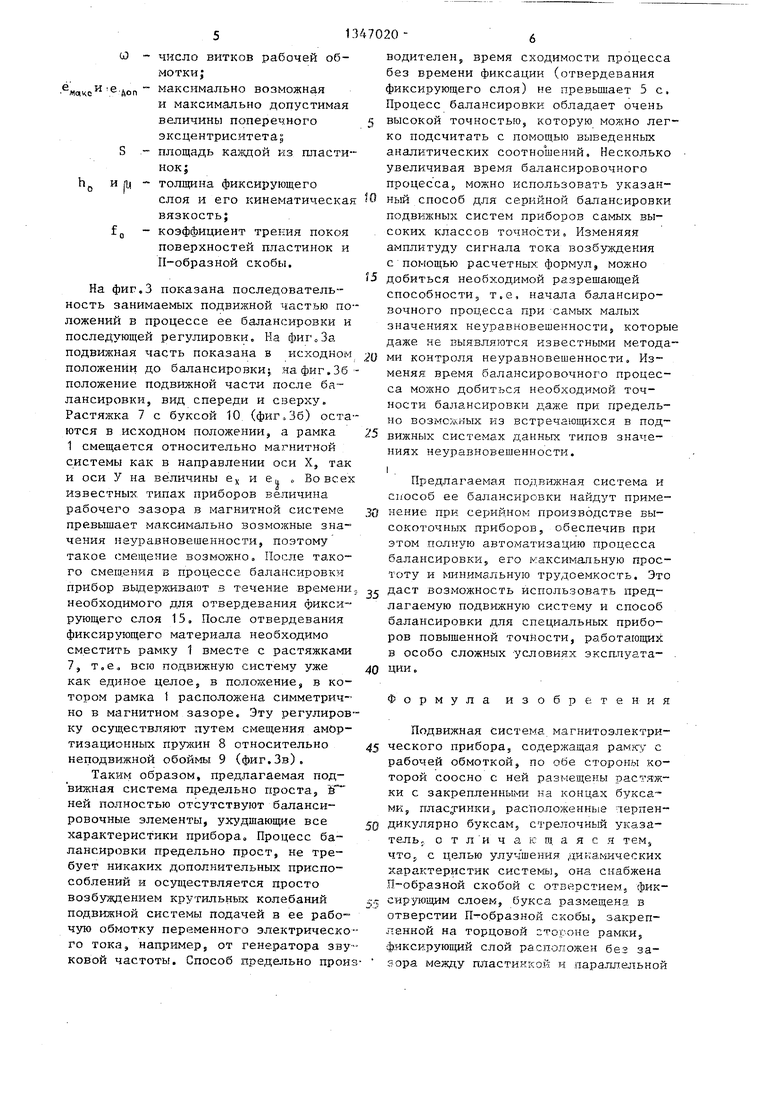
Подвижная система электроизмерительного прибора магнитоэлектрической системы содержит рамку 1 с установленными на ней рабочей обмоткой 2 и стрелочным указателем 3, размещенную в рабочем зазоре -4 магнитной системы, образованной магнитом 5 и внутрирамочным сердечником 6, и подвешенную на растяжках 7, закрепленных наружными концами на амортизационных пружинах 8, установленных с возможностью смещения в обойме 9 Внутренние концы растяжек 7 закреплены на рамке 1 с помощью установленных с внешней стороны нерабочих сторон рамки. 1 букс 10, на торцах которых перепендикулярно оси -закреплены пластинки 11, причем каждая из букс свободно вставлена в отверстие 12 большего диаметра, выполненное в верхней части закрепленной на рамке 1 с помощью зажимов 13 П-образ- ной скобы 14 так, что пластинка 11 расположена между скобой 14 рамки Ij а на обращенную к скобе 14 сторону пластинки 11 нанесен фиксирующий слой 15 (например, клей ВК-32-200).
Автоматическую балансировку предлагаемой подвижной системы осуществляют следующим образом.
Предварительно наносят на обращенную к скобе 14 сторону пластинки 11 фиксирующий слой 15.
В общей случае проекция центра масс подвижной системьз С на плоскость перпендикулярную ее оси, не совпадает с центром жесткости Ор лежаищм на оси вращения подвижной системы,, . т.е. на линии, проходящей через места крепления растяжек к рамке, на величину вектора поперечного эксцент
риситета е, при этом е и е,, - проекции вектора на поперечные оси. Возбуждают вынужденные колебания
подвижной системы вокруг ее оси вращения подачей в рабочую обмотку 2 переменного электрического сигнала, частоту f которого выбирают равной резонансной частоте колебаний подвиж ой системы относительно данной оси. При подаче в рабочие стороны рамки 1 переменного электрического сигнала на подвижную систему действует переменный вращающий момент (фиг.2), т.е.
полпериода момент М действует, например, против часовой стрелки (сплошная линия)S а другую половину периода момент М действует по часовой стрелке (пунктирная линия),
Такое действие момента приводит к возникновению крутильных колебаний подвижной системы с резонансной частотой f. Если подвижная система статически уравновешена, ее колебания происходят относительно ее геометрического центра, являющегося одновременно центром ее жесткости О, Однако за счет наличия поперечной неуравновешенности колебания подвижной
системы происходят относительно ее центра масс С, Так как момент, обра- зуюпщй пару сил, например М,, прилагается к рабочим сторонам рамки симметрично относительно ее геометричес-
кого центра О, а плечи этих сил, т.е. их расстояния до центра масс С разные, естественно, для равновесия одна из сил пары, действующая на меньшем плече (сила F, ) должна быть
больше другой силы F , действующей . на большем плече. Таким образом, при крутильном действии пары сил М в половину периода за счет неуравновешенности одновременна возникает
усил:ие, прилагаемое к рамке в попе™ речном направлении, направленное в с торону большей снпы F, и равное F,p F -F, (на фиг„2 направлено от нас). Это явление обратно тому, что
при воздействии на рамку поступательных возмущений за счет ее неуравновешенности возникают крутильные колебания вокруг оси вращения.
Во вторую- половину периода при
действии пары сил в противоположную сторону Mj аналогично возникает результирующая поперечн8.я сила F2p Fj - F , направленная на фиг,2 на каСс Силы F,p и F,, зь зывают одновременно с крутильными и поперечные колебания рамки 1, при которых возникают ее смещения относительно букс 10 в местах их соприкосновения, а именно в местах нахождения вязкого фиксирующего слоя 15. При этом, если на буксы 10 за счет их натяга с растяжками 7 и поджатия к рамке 1 в месте контакта со скобами 14 действует восстанавливающая сила, возвращающая их в исходное положение, колебаниям рамки 1 относительно букс 10 препятствуют только силы полужидкостного трения, возникающие в месте прижатия скоб 14 рамки 1 к пластинкам 11, где нанесен фиксирующий слой, 15, за счет прижатия контактирующих поверхностей усилием натяжения растяжек 7,
Если силы F и , действующие в поперечном направлении, равны, они вызывают только поперечные колебания рамки 1 относительно линии крепления букс 10 к рамке 1, а постоянная составляющая при таких колебаниях равна нулю. Однако, так как поперечные колебания происходят вместе с крутильными, при том расположении центра масс С, как показано на фиг.2, поперечная сила F, , действующая, как было указано, одновременно с моментом Mj, оказывает все время действие на рамку 1 при больших проекциях эксцентриситета е, чем сила F, (при поворотах по часовой стрелке от исходного положения вектор е ближе к оси X, чем при цоворотах против часовой стрелки).
Возникновение поперечных сил F, и FI обусловлено именно наличием проекции эксцентриситета на ось X (эти силы действуют на подвижную систему вдоль оси Y). Таким образом, за весь период колебаний на рамку 1 действует постоянная составляющая, направленная в поперечном направлении и равная Fp - F,p . Эта составляющая вызывает постоянное смещение рамки 1 относительно мест установки буКс 10 в направлении оси Y в сторону уменьшения проекции эксцентриситета е„. Рамка 1 смещается до тех пор, пока ее центр масс С не выходит на ось X, т.е. пока ей не становится равным нулю, при этом сила F сравнивается с силой Fip , т.е. постоянная поперечная сила Fp, вызывающая смещение рамки 1 вдоль оси У, становится равной нулю. Таким
образом, происходит автоматическое смещение центра жесткости О рамки в направлении поперечной оси У до совмещения с центром масс С, положение которого относительно рамки 1 остается неизменным, а изменяется только место крепления растяжек 7 к рамке 1, т.е. место установки букс 10 от- носительно рамки.
Балансировка осуществляется в направлении оси У, одновременно аналогичный процесс происходит и в направлении оси X, так как при действии пар Йил с моментами М, и М поперечные усилия за счет наличия неуравновешенности возникают как вдоль оси У из-за наличия проекции эксцентриситета е, так и вдоль оси X из-за на5
0
5
личия проекции эксцентриситета е. .Таким образом, смещение рамки 1 относительно букс 10 происходит одновременно по двум осям, и в конечном итоге их постоянное смещение прекращается только тогда, когда с центром масс С, находящимся на линии установки букс, совпадет центр жесткости О подвижной части.
30 Амплитуду I подаваемого в рабочую обмотку электрического сигнала и время t продолжения возбуждения выбирают из условия необходимого смещения букс 10 относительно рамки. Режимы возбуж35 дения выбираются (рассчитываются) как из условия получения необходимой точности процесса балансировки, т.е. сходимости балансировочного процесса с заданной степенью точности, так и
40 из условия максимальной разрешающей способности процесса,т.е. возникновения процесса балансировки - начала смещения букс относительно рамки при минимальных (максимально допус45 тимык) проекциях эксцентриситета, а также при минимально возможном при заданном уровне возбуждения поперечном возмущении, передаваемом на рамку
50. f т . и.
X 2. ,
1бВЬсо:е доп
8В h U е доп
Т
b и h В
-усилие натяжения растяжек;
-ширина и высота рамки;
-индукция в рабочем зазоре прибора;
адко
(J - число витков рабочей обмотки;.доп максимально возможная
и максимально допустимая величины поперечного эксцентриситета; S ,- площадь калсдой из пластинок;hg и лд - толщина фиксирующего
слоя и его кинематическая вязкость;
fo - коэффициент трения покоя поверхностей пластинок и П-образной скобы.
На фиг.З показана последовательность занимаемых подвижной частью положений в процессе ее балансировки и последующей регулировки. На фиг„3а подвилшая часть показана в исходном положении до балансировки} на фиг.36 положение подвижной части после балансировки, вид спереди и сверху. Растяжка 7 с буксой 10, (фиг.36) остаются в исходном положении, а рамка 1 смещается относительно магнитной системы как в направлении оси Х, так и оси У на величины е и е,, . Во всех известных типах приборов величина рабочего зазора в магнитной системе превышает максимально возможные значения неуравновешенности, поэтому такое смещение возможно. После такого смеш.ения в процессе балансировки
прибор выдерживают з течение времени; 5 даст возможность использовать преднеобходимого для отвердевания фиксирующего слоя 15. После отвердевания фиксирующего материала, необходимо сместить рамку 1 вместе с растяжками 7, т.е„ всю подвижную систему уже как единое целое, в положение, в котором рамка t расположена симметрично в магнитном зазоре. Эту регулировку осуществляют путем смещения амортизационных пружин 8 относительно нецодвижной обоймы 9 (фиг.Зв).
Таким образом, предлагаемая подвижная система предельно проста, ё ней полностью отсутствуют балансировочные элементы, ухудшающие; все характеристики прибора Процесс балансировки предельно прост, не требует никаких дополнительных приспособлений и осуществляется просто возбуждением крутильных колебаний подвижной системы подачей з ее рабочую обмотку переменного электрического тока, например, от генератора звуковой частоты. Способ преде-пьно произ
лагаемую подвижную систему и способ балансировки для специальных приборов повышенной точности, работающих в особо сложных условиях эксп.пуа.та 40 ции.
Формула изобретени
Подвижная система магнитоэлектри 45 ческого прибора, содержащая рамкгу с рабочей обмоткой, по обе стороны ко торой соосно с ней размещеиъ растяж ки с зaкpeплeнньцv и на концах буксами, плас;гинкИз расположенные терпен 50 дикулярно буксам, стрелочный указатель,, о т л и ч а к га, а я с я тем, что5 с целью улуч шения дика.мических характеристик системы, она снабжена П-образной скобой с отверстием; фик s;,t сирующим слоем, букса размещена в отверстии П-о,бразной скобы, закрепленной на торцовой стороне рамки, фиксирующий слой расположен без зазора между пластинкой и паратшельно
водителен, время сходимости процесса без времени фиксации (отвердевания фиксирующего слоя) не превышает 5 с. Процесс балансировки обладает очень
высокой точностью, которую можно легко подсчитать с помощью выведенных аналитических соотношений. Несколько увеличивая время балансировочного процесса5 можно использовать указанньм способ для серийной балансировки
подвижных систем приборов самых вы- соких классов точности, Изменяяя амплитуду сигнала тока возбуждения с помощью расчетных формул, можно
добиться необходимой разрешающей способности, т.е, начала балансировочного процесса при самых малых значениях неуравновешенности} которые даже не выявляются известными методами контроля неуравновешенности. Изменяя время балансировочного процесса можно добиться необходимой точности балансировки даже при предельно возможных из встречаюш ахся в подвижных системах данных типов значениях неуравновешенности.
I
Предлагаемая подвижная система и
способ ее балансировки найдут приме- нение при серийном производстве высокоточных приборов, обеспечив при этом полную автоматизацию процесса балансировки,, его максимальную простоту и минимальную трудоемкость. Это
лагаемую подвижную систему и способ балансировки для специальных приборов повышенной точности, работающих в особо сложных условиях эксп.пуа.та . ции.
Формула изобретения
Подвижная система магнитоэлектри- ческого прибора, содержащая рамкгу с рабочей обмоткой, по обе стороны которой соосно с ней размещеиъ растяжки с зaкpeплeнньцv и на концах буксами, плас;гинкИз расположенные терпен- дикулярно буксам, стрелочный указатель,, о т л и ч а к га, а я с я тем, что5 с целью улуч шения дика.мических характеристик системы, она снабжена П-образной скобой с отверстием; фик- сирующим слоем, букса размещена в отверстии П-о,бразной скобы, закрепленной на торцовой стороне рамки, фиксирующий слой расположен без зазора между пластинкой и паратшельной
7 1347020
ей стороной П-образной скобы, величина отверстия в которой выбирается из условия
о.сч - RO. (С),, 5 где RO.CK радиус отверстия П-образной. скобы;
8
радиус отверстия буксы; максимально допустимое значение поперечного отклонения рамки прибора; максимальное значение поперечного эксцентриситета.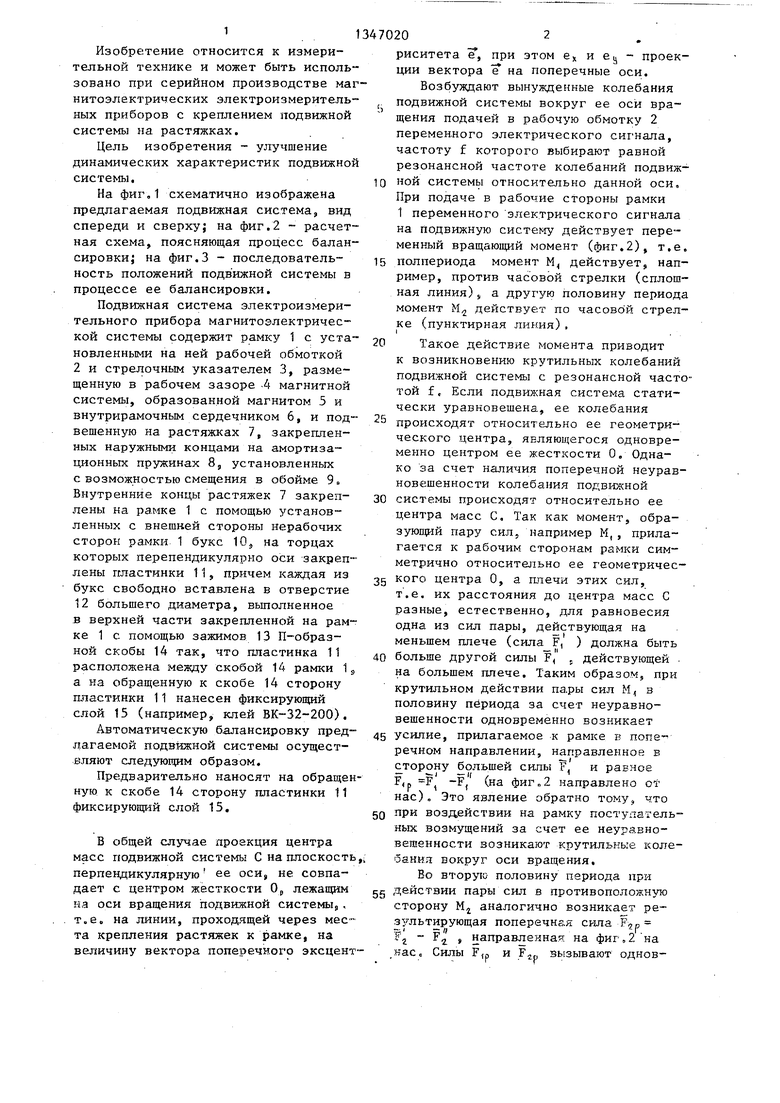

| название | год | авторы | номер документа |
|---|---|---|---|
| Подвижная система электроизмерительного прибора | 1985 |
|
SU1396062A1 |
| Устройство для статической балансировки подвижной части прибора | 1984 |
|
SU1216691A1 |
| Подвижная система магнитоэлектрического измерительного прибора и способ ее балансировки | 1984 |
|
SU1226315A1 |
| Подвижная система электромеханического прибора | 1982 |
|
SU1033972A1 |
| Щитовой магнитоэлектрический амперметр | 1985 |
|
SU1276998A1 |
| Стенд для балансировки подвижной части электроизмерительного прибора | 1983 |
|
SU1142743A1 |
| ПОДВИЖНАЯ СИСТЕМА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИБОРА | 1997 |
|
RU2144677C1 |
| Электроизмерительный прибор | 1984 |
|
SU1208512A1 |
| Подвижная система электроизмерительного прибора | 1989 |
|
SU1677646A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ТЕЛ | 2003 |
|
RU2230303C1 |
Изобретение относится к измерительной технике и может быть исполь зовано при производстве магнитоэлектрических электроизмерительных при- «боров с креплением подвижной системы на расгяткках. Подвижная система магнитоэлектрического п ибора имеет рамку 1 с рабочей обмоткой 2 и стрелочным указателем 3, установленную в рабочем зазоре 4 магнитной системы в виде магнита 5 и внутрирамочного сердечника 6, подвешенную на растяжках 7. Внутренние концы растяжек 7 закреплены на рамке 1 с помощью букс 10 и пластинок 11. Каждая из букс 10 свободно вставлена в отверстие 12 П-образной скобы 14. На пластинку 11 нанесен фиксирующий слой 15, например клей ВК-32-200. Величину отверстия 12 выбирают из соотношения о.. (. е«01кс) где RO. радиус отверстия 12; RO,E радиус отверстия буксы 10; б - Максимально допустимое значение поперечного отклонения рамки прибора; максимальное значение поперечного эксцентриситета. Изобретение улучшает динамические характеристики подвиж- 3 ил. с сл 13, ро 4 Фиг./
Т Фив. 2
Редактор И,Горная
Фиг.
Составитель Ф.Тарнопольская
Техред А.Кравчук Корректор А.Зимокосов
Заказ 5116/43 Тираж 729 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб.,-д.4/5
.Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Алукер Ш.М | |||
| Электрические измерения | |||
| М.: Колос, 1968, с.65 | |||
| Подвижная система магнитоэлектрического измерительного прибора и способ ее балансировки | 1984 |
|
SU1226315A1 |
