Известные грейдеры, содержащие блок автоматической стабилизации положения рабочего органа, обеспечивающий включение и выключение золотникового гидравлического или пневматического привода рабочего органа, не обеспечивают достаточно высокой точности отделочных работ.
В предлагаемом грейдере применен трехпозиционный релейный регулятор с маятниковым датчиком и дроссельной заслонкой, служащей ДЛЯ регулру.ования коэффициета демпфирования. Это обеспечивает требуемую точность отделочных работ дорожного полотна при меньщем числе прохода. Для повышения стабильности работы регулятора напряжение на мостовую схему подается от отдельного источника, а для стабилизации тока моста применено нелинейное сопротивление. С целью повышения стабильности работы в грейдере применены поляризационные реле с компенсационной обмоткой, магнитный поток которой направлен навстречу магнитному потоку реле. Кроме того, для повышения чувствительности регулятора в мостовую схему включено электронное реле на полупроводниковых триодах. Источник питания моста имеет повышенное напряжение.
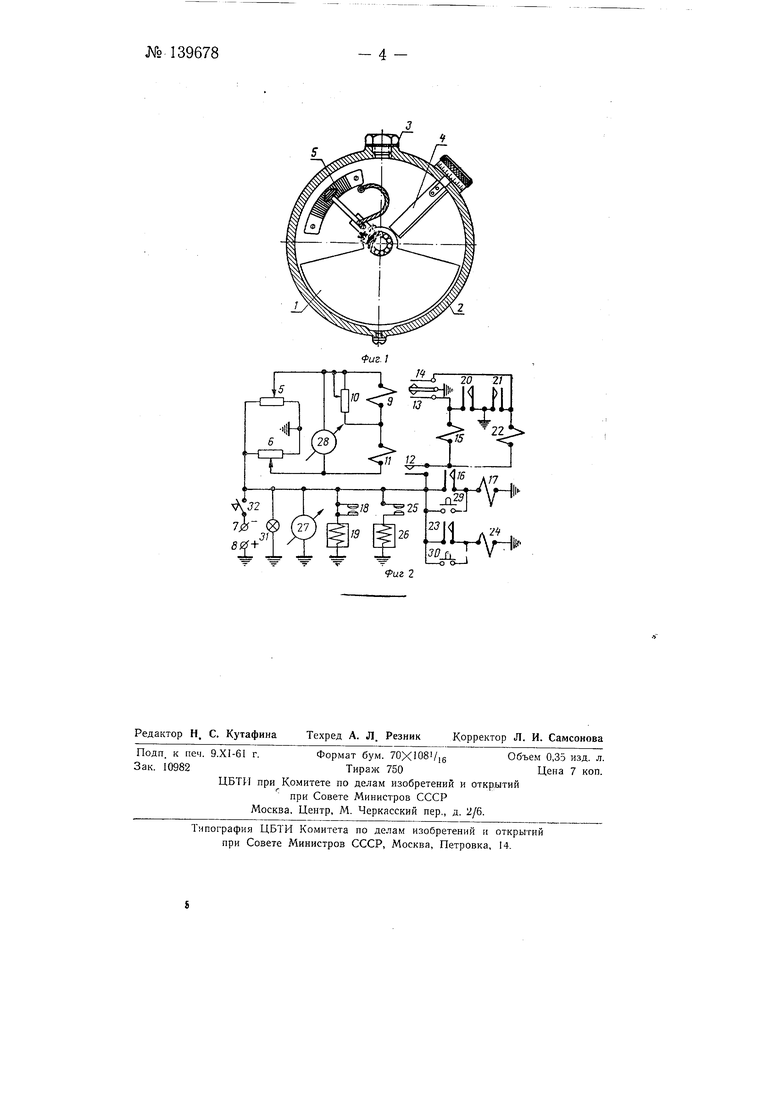
На фиг. 1 изображена конструкция датчика угла наклона рабочего органа; на фиг. 2 - электрическая схема блока автоматической стабилизации положения рабочего органа грейдера.
Управление золотниковым гидравлическим или пневматическим приводом рабочего органа грейдера производят по углу поперечного наклона этого органа, сравниваемого с заданной величиной угла наклонаДaJЧИк угла поперечного наклона рабочего органа установлен на тяговой раме грейдера. В датчике применен маятник /, выполненный в вид:.; сектора, помещенного в цилиндрический корпус 2, заполненный маслом
№ 139678- 2 и снабженный пробкой 3- Коэффициент демпфирования датчика регулируют поворотной дроссельной заслонкой 4, препятствующей свободному перемещению масла внутри корпуса 2. Потенциометр 5 датчика включен в мостовую схему трехпозиционного релейного регулятора автоматической стабилизации положения рабочего органа. Мостовая схема образована потенциометром 5 датчика и потенциометром 6, задающим требуемый угол наклона рабочего органа.
Для повыщения стабильности работы релейного регулятора питание мостовой схемы осуществляют от отдельного источника повыщепного напряжения, подключенного к зажимам 7, 8. Для стабилизации тока мостовой схемы применено нелинейное сопротивление, не обозначенное на чертеже. В диагональ моста включено поляризованное реле 9, защунтированное потенциометром 10 и реле //. При угле поперечного наклона рабочего органа грейдера, отличающегося от значения, задаваемого положения потенциометра 6 на величину, например, Д, несколько меньщую максимально допустимой величины отклонения ,акс напряжение р.азбаланса, возникающее на диагонали мостовой схемы, вызывает срабатывание реле // и замыкание контактов 12. При максимально допустимом (. .) отклонении угла наклона рабочего органа от заданного (максимальная ошибка) срабатывает реле Риз зависимости от знака ощибки на землю замыкаются контакты 13 и 14. При знаке -|- замыкается контакт 13, включающий промежуточное реле 15, При включении реле 15 замыкаются его контакты 16 и срабатываег конгактор 17, замыкающий контакты 18, через которые подается напряжение на электромагнит 19, управляющий опусканием рабочего органа. Одновременно реле 15 самоблокируется контактом 20 через контакты 2.
При увеличении ошибки знак и величина сигнала, подаваемого на привод грейдера, остаются постоянными, отвал перемещается с постоянной скоростью и величина ошибки уменьшается. При уменьщении величины ощибки ниже значения контакт 13 размыкается, но реле /5, остается включенным через контакты 2} и 12 ц привод продолжает работать в том же направлении. При уменьщении ощибки до значения До отпускает реле //, размыкающее цепь питания реле 15, и привод останавливается. При появлении ощибки со знаком - вначале при опшбке, равной До, так же как и в первом случае, срабатывает реле // и замыкаются контакты 12. Привод грейдера при этом выключен. После ув.з личения значения ощибки до срабатывает реле 9, замыкающзе контакт 14 на землю. При замыкании контакта 14 включается реле 22, которое замыкает контакт 23, и на контактор 24 подается напряжение. Контактор 54 замыкает контакты 25, в результате чего включается электромагнит 26, управляющий подъемом привода. Вследствие блокирующего действия контактов 2J и 12 привод продолжает работать до тех пор, пока абсолютная величина ощибки не станет меньше До.
Для измерения напряжения источника питания служит вольтметр 27. Вольтметр 28 измеряет величину сигнала ощибки, возникающего на диагонали мостовой схемы. Кнопки 29,30 предназначены для ручного управления опусканием и подъемом рабочего органа. Контроль подачи напряжения питания на блок автоматической стабилизации осуществляют при помощи индикаторной лампы 31. Для включения источника питания служит ключ 32. В целях уменьшения влияния колебаний налряжения источника питания на работу блока может быть применена вспомогательная компенсационная обмотка, магнитный поток которой направлен навстречу основному магнитному потоку реле. При падении напряжения на диагонали моста в результате снижения напряжения источника питания происходит усиление магнитного потока реле, че.м
компенсируется влияние падения напряжения источника питания. Для повышения чувствительности мостовой -схемы в нее может быть включено электронное реле, выполненное, например, на полупроводниковых триодах.
Предмет изобретения
1.Грейдер с автоматической стабилизацией положения рабочего органа, включающий золотниковый гидравлический или пневматический
привод рабочего органа, отличающийся тем, что, с целью обеспечения требуемой точности отделочных работ дорожного полотна при меньшем числе проходов, в нем применен трехпозиционный релейный регулятор с маятниковым датчиком, снабженным дроссельной заслонкой для регулирования коэффициента демпфирования.
2.Грейдер по п. 1, от л и ч а ю щи и ся тем, что, с целью повышения стабильности работы регулятора, напряжение на мостовую схему подается от отдельного источника.
3.Грейдер по п. 1, отличающийся тем, что для стабилизации тока моста применено нелинейное сопротивление.
4.Грейдер по п. 1, отличающийся тем, что для повышения стабильности работы применены поляризационные реле с компенсационной обмоткой, магнитный поток которой нанравлен навстречу магнитному потоку реле.
5.Грейдер но п. 1, от л и ч а ю и: ч и с я тем. что для повышения чувствительности регулятора в мостовую схему включено электронное реле на полупроводниковых триодах.
6.Грейдер по п. 1, отличающийся тем, что источник питание; моста имеет повышенное напряжение.
- 3 -№ 139678
aivfH.
™AJ