преобразователя 6 и 7. Электроды каж-20 способ для динамического управления
параметрами вибродвигателя в различных прецизионных,устройствах, например в позиционирующих столах субмикронной фотолитографии для достижения
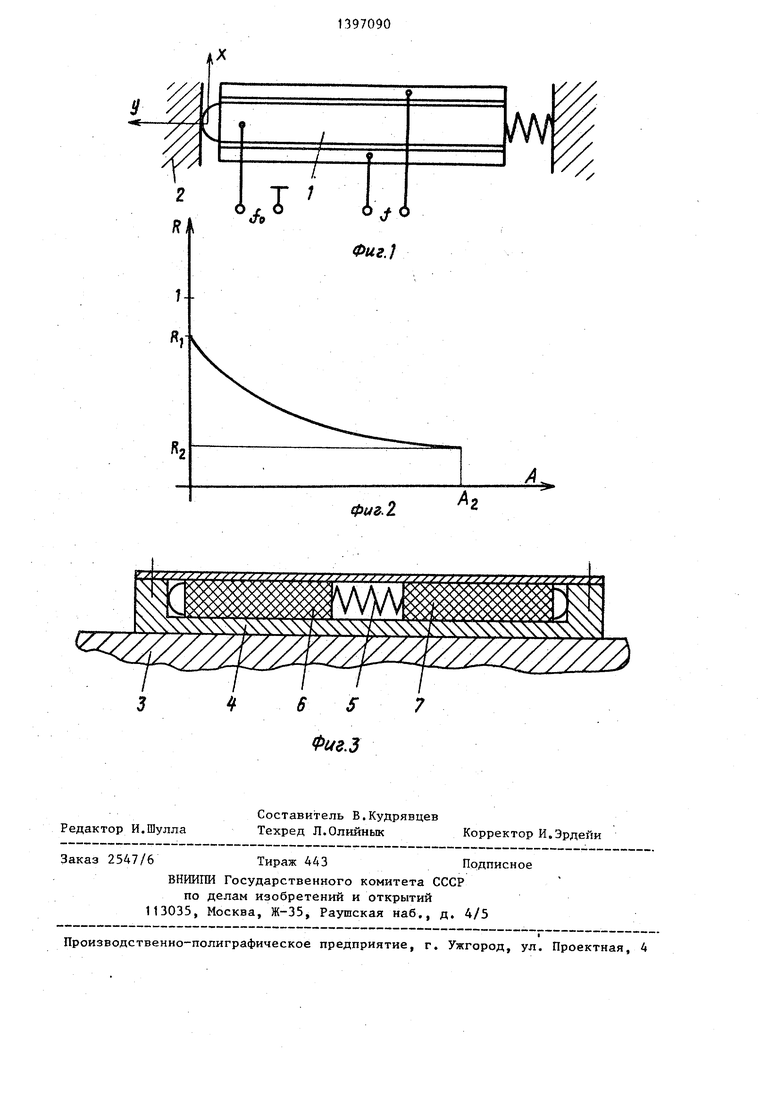
дого преобразователя разделены на три продольные зоны 8 и 9. Центр альная зона 8 подключена напрямую к генератору 10 высокочастотных колебаний с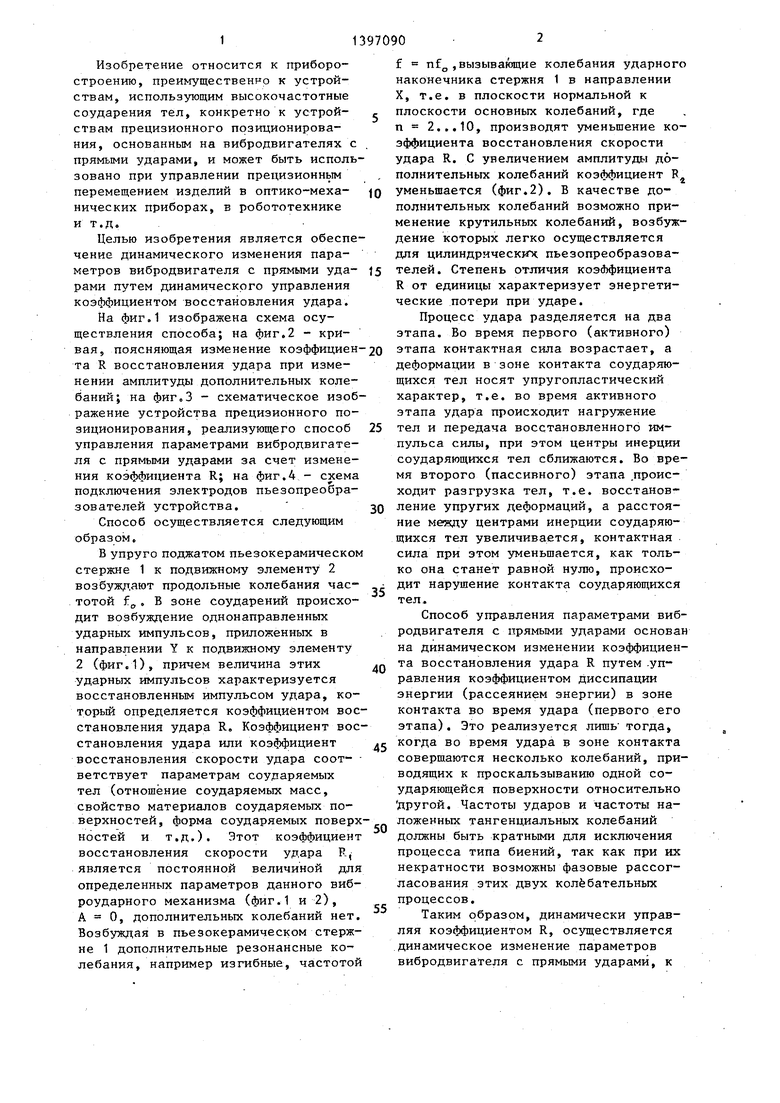
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРОЧНЕНИЯ ОПОРНОЙ ПОВЕРХНОСТИ КРАТЕРА ПОДПЯТНИКА | 1996 |
|
RU2117302C1 |
| Устройство для полунатурного моделирования виброударных механических систем | 1983 |
|
SU1251116A1 |
| Вибродвигатель | 1979 |
|
SU853710A1 |
| Вибропривод | 1979 |
|
SU799053A1 |
| Однофазный вибродвигатель | 1979 |
|
SU864385A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ИЗДЕЛИЙ НА ВИБРОУДАРНЫЕ НАГРУЗКИ | 2007 |
|
RU2348021C1 |
| Синхронный шаговый вибродвигатель | 1979 |
|
SU858150A1 |
| ВИБРОУДАРНЫЙ ИНСТРУМЕНТ С УЛЬТРАЗВУКОВЫМ ВОЗБУЖДЕНИЕМ | 1998 |
|
RU2179919C2 |
| Вибродвигатель | 1976 |
|
SU641616A1 |
| ВЫСОКОЧАСТОТНЫЙ БОЕК | 2005 |
|
RU2310541C2 |
Изобретение относится к приборостроению. Цель изобретения - обеспечение динамического изменения параметров вибродвигателя с прямыми ударами путем динамического управления коэффициентом восстановления удара. При подаче напряжения генератора 10 на центральную зону электрода 8 преобразователя последний начинает совершать резонансные продольные колебания, а в зоне соударения со стенкой столика 4 возникают однонаправленные ударные импульсные силы, величина которых определяется восс.та- новленным ударным импульсом, в свою очередь, зависящим от коэффициента восстановления удара. Режим работы вибродвигателя зависит от стабильности виброударного процесса, которая определяется коэффициентом восстановления удара. 4 ил. с 
частотой f.g , а две другие зоны 9 под- 25 оптимальных величин
выполнении отличных к ним требованиям т операций (например ционирование, высок ние и т.д.), к котор одновременные требов действию и точности
ключены к нему через умножитель 11 частоты и усилитель 12. Кратность умножения частоты п 2...10.
Устройство работает следующим образом,
При подаче напряжения генератора 10 на центральную зону В электрода пьёзопреобразователя 7 последний начинает совершать резонансные продольные колебания, а в зоне соударения со.стенкой столика 4 возникают однонаправленные ударные импульсы силы, величина которых определяется восстановленным ударным импульсом, зависящим от коэффициента восстановления удара R (фиг.1). Режим работы вибродвигателя зависит от стабильности виброударного процесса, которая определяется коэффициентом восстанов
ления удара, и в этом случае для дан- g подбора характеристик соударяемых
ного режима параметры вибродвигателя (средняя скорость, разрешающая способность и т.д.) имеют свои определенные значения.
При дополнительной подаче напряжения через умножитель 11 частоты и усилитель 12 на две крайние зоны электрода в пьезопреобразователе возэлементов в момент соударения в зо соударения ударяющему элементу соо щают дополнительные колебания в пл кости, нормальной к плоскости удар gQ ных колебаний, при этом частота до полнительных колебаний выбирается условия f nfo, где fо - частота ударных колебаний, п 2..,10,
оптимальных величин
параметров при выполнении отличных по предъявляемым к ним требованиям технологических операций (например скоростное позиционирование, высокоточное выставление и т.д.), к которым предъявляются одновременные требования по быстродействию и точности.
ормула изобретения
Способ управления параметрами вибродвигателя с прямыми ударами, вклю чающий возбуждение вибродвигателя и изменение коэффициента восстановления скорости удара путем подбора характег ристик соударяемых элементов, отличающийся тем, что, с целью обеспечения динамического управления параметрами вибродвигателя, после
элементов в момент соударения в зоне соударения ударяющему элементу сообщают дополнительные колебания в плоскости, нормальной к плоскости удар- gQ ных колебаний, при этом частота дополнительных колебаний выбирается из условия f nfo, где fо - частота ударных колебаний, п 2..,10,
и
efл
I
1 1..J
vf
vf
Фиг.1
у X ч
| Устройство прецизионного позиционирования | 1979 |
|
SU864386A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
