1
Изобретение относится к приборостроению, а именно к устройствам точного позиционирования, и может быть использовано при решении задач, требующих прецизионного перемещения изделий в сборочном оборудовании, в оптико-механических приборах, в координатных измерительных приборах, в робототехнике и т.д.
Известно устройство для прецизионного перемещения изделий, содержащее основание, столик, приводные пьезоэлектрические преобразователи Cl .
Недостатком данного устройства является отсутствие поворота столика вокруг его центральной оси, обусловленное тем, что продольные оси преобразователей пересекзиотся в точке, расположенной на центральной оси столика. Поворот столика относительно любой другой оси П1 иводит к изменению всех координат центра столика, что значительно усложняет управление Работой устроЯства. Кроме того, наклонное расположение пъезопреобразователей между столиком и основанием заставляющее их нести на себе всю нагрузку от массы столика и перемещаемого изделия, приводит к возникновению в теле преобразователей
сложного напряженного состояния, искажающего форму колебаний преобразователей, в конечном счете сказывающегося на характере движения столика, затруднякяцего управление, понижающего нгшйжность работы устройства.
Известно также устройство для прецизионного перемещения изделий, содержащее основание, столик, приводные
10 пьезоэлектрические преобразователи, подключенные к генератору высокочастотных колебаний 2}.
Недостатками данного устройства
5 являются ограниченный ход столика и зависимость параметров позиционирования от величины его перемещения, а также то, что приводные пьезоэлектрические преобразователи перемещаются
20 вместе со столиком, в то время как поджимающие пружины, расположенные между преобразователями и корпусом, всегда остаются неподвижными относительно корпуса, что приводит к изме25нению параметров позиционирования в зависимости от величины перемещения столика.
Цель изобретения - расширение функционсшьных возможностей и обеспечение независимости параметров позиционирования от величины перемещения столика.
Поставленная цель достигается тем что в устройстве, содержащем основание, столик, приводные пьезоэлектрические преобразователи, подключенные к генератору высокочастотных (Колебаний, столик выполнен с четырьмя попарно-перпендикулярными выемками, расположенными в плоскости, параллельной основанию, в каждой из которых с упругим натягом установле,ны по два пьезоэлектрических преобразователя, одним концом упирающихся в стенки выемок.
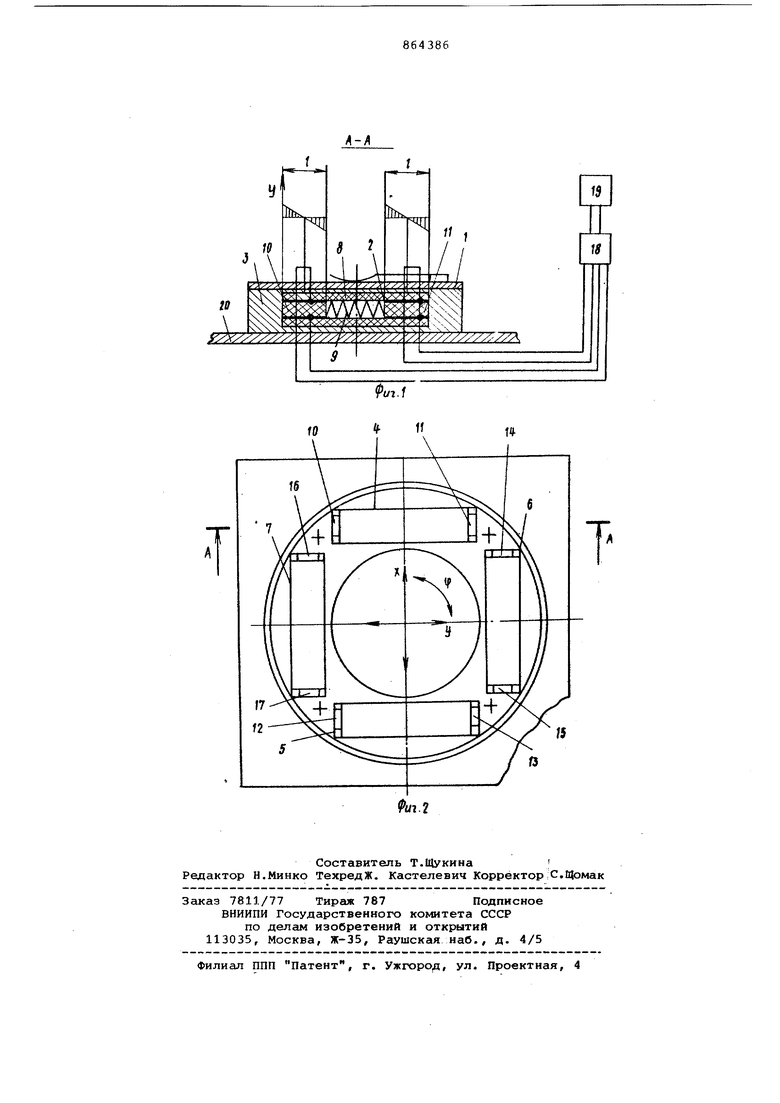
На фиг.1 показано расположение пъезокерамических стержней в выемке столика,форма колебаний пъезокерамических стержней,разрез А-А на фиг.2; на фиг.2 - то же, вид сверху безг крышки столика.
Устройство прецизионного позиционирования состоит из крышки 1 столика с прижимной планкой 2, крепящейся на столике 3, в теле которого выполнены попарно-перпендикулярно расположенные выемки 4-7 (фиг.2). В каждой выемке смонтирована в держателе 8 и разжата пружиной 9 пара пъезокерамических стержней 10 и 11, 12 и 13,14 и 15,16 и 17 соответственно, причем каждый стержень одним кон:цом упирается на пружину 9, а другим в стенку выемки столика 3 (фиг.1 и 2 Электроды каждого из стержней 10-17 через коммутирующее устройство 3.8 подсоединены к генератору 19 высокочастотных колебаний. Столик 3 располгается На основании 20.
Устройство работает следующим образом.
При подаче напряжения с генератора 19 через коммутирующее устройство 18 на электроды одного из пъезокерамических стержней 10-17 последний начинает совершать высокочастотные резонансные колебания по длине
с частотой -F - ,
- ае
где с - скорость звука в материале
стержня;
t - длина стержня. По длине преобразователя укладывается половина волны. Стержень, совершая высокочастотные колебания, одним концом ударяется в стенку выемки столика 3, а другим своим концом опирается на пружину 9, которая в момент удара сглаживает импульс силы удара стержня, направленный в ее сторону. Таким образом, в зоне контакта корпуса столика 3 и стержня происходят высокочастотные прямее микроудары, направленные в одну сторону. Величина импульса силы удара в момент удара превосходит,силу трения
между корпусом столика 3 и основанием 20, что и заставляет столик совершать микроперемещения относительно основания 20. Комбинируя при помощи кoм yтиpyIaдeгo устройства 18 подклю. чение различных стержней, получаем неограниченное движение столика по двум координатам К, У и поворот вокруг центральной оси на неограниченный угол Ч (фиг.2) . При подключении
стержней 11 и 13 Лолучаем движение, направленное по оси Y вправо, для получения обратного движения подключаем стержни 10 и 12. Для получения движения по оси X аналогичным образом подключаем стержни 14, 16 и 15, 17.
5 Для получения вращения (фиг.2) по
часовой стрелке необходимо подключить стержни 11,15,12 и 16 для обратного вращения - противоположные стержни. Чувствительность такого позиционирующего устройства велика (в изготовленном у заявителя макете пои преобразователях из пъезокерамического материала ЦТС-19 получена чувствительность 0,05 мк), так как амплиту5 ДЫ колебаний очень малы (несколько микрометров), а частоты большие от 20 до 200 кГц. Конструкция позиционирующего устройства предельно проста. Предложенное позиционирующее устройство обладает, неограниченным ходом столика по двум координатам и неограниченным углом поворота столика вокруг его центральной оси, обусловленным тем,что; пружины, поджимающие приводные пъезопреобразователи перемещаются вместе со столиком и поэтому сила их поджатия не зависит от величины перемещения столика.
Формула изобретения
Устройство прецизионного позиционирования, содержащее основание, столик, приводные пьезоэлектрические преобразователи, подключенные к генератору высокочастотных колебаний, отличающееся тем, что, с целью расширения функциональных возможностей и обеспечения независимости параметров позиционирования от велиQ чины перемещения столика, столик выполнен с четырьмя попарно-перпендикулярными выемками, расположенными в плоскости, параллельной основанию, в каждой из которых с упругим натягом установлены по два пьезоэлектрических преобразователя, одним концом упирающихся в стенки выемок.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 0 529509, кл. Н 01 L 21/66, 1976.
2.Патент США № 3808488, кл. 310-8.2, опублик. 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Однофазный вибродвигатель | 1979 |
|
SU864385A1 |
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU516056A1 |
| Координатный вибропривод | 1979 |
|
SU851563A1 |
| Манипулятор | 1989 |
|
SU1641606A1 |
| Вибродвигатель | 1978 |
|
SU765910A1 |
| Устройство для ориентации подложек | 1980 |
|
SU917365A1 |
| Устройство прецизионного позицирования | 1980 |
|
SU928470A1 |
| НАНОМЕТРИЧЕСКОЕ ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 2002 |
|
RU2233736C2 |
| Способ управления параметрами вибродвигателя с прямыми ударами | 1985 |
|
SU1397090A1 |