«
Изобретение относится к машиностроению и может быть использовано для автоматизированного, динамического синтеза плоских пружинз-гых элементов коммутирующих yпpaвляe -fl)IX уст- ройств, .
Целью изобретения является расширение функционалы-шх возможностей за счет учета характеристик соударяющихся плоских пружинных элемен- тов.
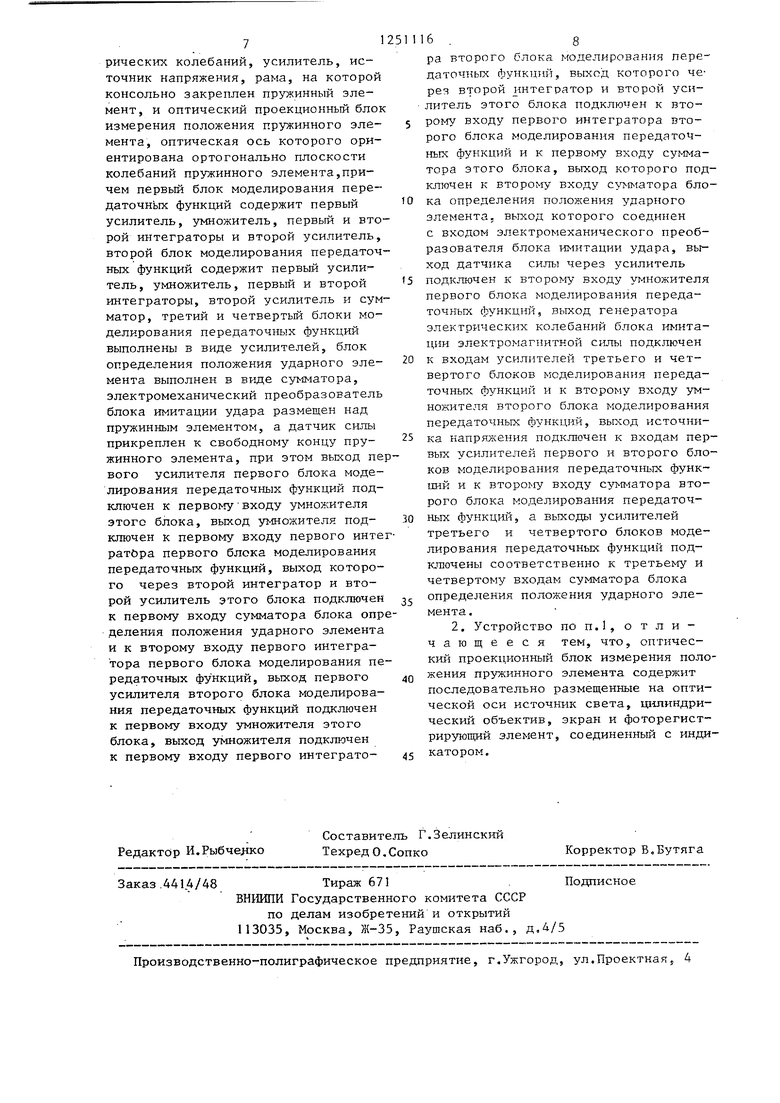
На чертеже представлена блок-схема .устройства.
Устройство содержит раму 1, на которой консольно закреплен пружин- ньм элемент 2, к свободному концу которого прикреплен датчик 3 силы. Над пружинным элементом 2 размещен электромеханический преобразователь 4 блока имитации удара, на оптической оси ортогонально плоскости колебаний пружинного элемента 2 размеще- лы источник 5 света, цилиндрический объектив 6, экран 7 и фоторегистри- рующий элемент 8, соединенный с индикатором 9. Первый блок 10 модели- рования передаточнь х функций состоит из последовательно соединенных первого усилителя i 1, умножителя 12, первого 13 и второго 14 интеграторов и второго усилителя 15., при этом выход второго усилителя 15 подключен к второму входу первого интегратора 13. Второй блок 16 моделирования пе- редагочных функций состоит из после- довательно соединенных первого усилителя 17, умножителя 18, первого 19 и второго 20 интеграторов, второго уси .лителя 21 и сумматора 22, при этом выход второго усилителя 21 подключен к второму входу первого интегратора 19. Третий 23 и четвертый 24 блоки моделирования передаточных функций состоят из соответствующих усилителей 25 и 26, входы которых подключены к выходу генератора 27 электрических колебаний блока 28 имитации электромагнитной силы, а выходы подключены к третьему и четвертому входам сумматора 29 блока 30 опре деления положения ударного элемента. К первому входу сумматора 29 подключен выход второго усилителя первого блока 10 моделирования передаточных функций,а к второму входу сумма- тора 29 - выход сумматора 22 второго блока 6 моделирования передаточных функций. Выход генератора 27 подклю
5
0
5
чен также к второму входу умножителя 18 второго блока моделирования передаточных функций, выход источника 31 напряжения подключен к входам первых усилителей 1I и 17 первого и второго блоков моделирования передаточных функгдай, а также к второму входу сумматора 22 второго блока моделирования передаточных функций. Выход датчика 3 силы через усилитель 32 подключен к второму входу умножителя 12 первого блока моделирования передаточных функций, а выход сумматора 29 подключен к входу электромеханического преобразователя 4 блока имитации удара.
Устройство работает следующим образом.
При соударении плоского пружинного элемента 2 с подвижной частью электромеханического преобразователя 4 элемент 2 начинает совершать изгиб- ные колебания , Преобразователь 4 предназначен для имитации положения конца моделируемого плоского пружинного элемента виброударной системы. С целью осуществления указанной имитации движение моделируемого пружинного элемента (элемент также рассматривается как стержень с защемленным началом и свободным концом) опишем дифференциальным управлением вида
...tl 3 y{x,t)
р ч . , ..
Эх
3t
-(x,t)--0, (f)
где
X - пространственная координата;
у x,-f)- прогиб упругой оси пружинного элемента; EJ - жесткость при изгибе;
m - прогонная масса; , tj - внешняя возмущающая сила
на единицу длины модулируемого пружинного элемента.
1тобы построить структурную схему моделируемого пружинного элемента, рассматриваются следующие граничные условия: для защемленного конца
0;
ЭУ- Эх
0;
(2)
для свободного конца с учетом ударного взаимодействия моделируемого пружинного элемента и реального пружинного элемента 2
тЬ Пв,-ь); у. 2,,(з)
3x2
Р е
дк F (E,t;
УГ, 7. n
сила взаимодействия во время контактирования пружинных элементов; координата прогиба конца моделируемого пру- 5 жинного элемента; координата удара на пружинном элементе 2.
Используя преобразование Лапласа для приведенного уравнения, прогиб любой точки моделируемого пружинного элемента определяется из уравнения., , х 1„Р / UP i-0 ,5
ж.,р1 -2- -Ёз- -2 : :rF
1 + тР -g-j
.-1- 2
/ iiipL +
1+ . 4Г-(-Ч5 i- M
ф --.« , ,..„«.«.«.........- .™ -
1
1
24ЁЗ
где Р - оператор преобразования Лапласа;
л (Р) - интенсивность распреде- „„
ленной электромагнитной
силы на элемент; - длина моделируемого упругого элемента.
Таким образом, чтобы получить прогиб моделируемого пружинного элемента в точке соударения с элементом 2 с помощью датчика 3, вьшолненного, например, в виде пьезокерамической пластинки, измеряется сила удара. Сигнал с датчика 3, пропорциональный этой силе, через усилитель 32 поступает на второй вход умножителя 12 первого блока моделирования передаточной функции. С помощью бло- ков моделирования передаточных функций 10, 16,23 и 24 на выходе сумматора 29 формируется сигнал, пропорциональный положению соударяющейся точки моделируемого пружинного эле- мента, представляющий правую часть равенства (4).
Формирование осуществляется следующим образом, С выхода источника 31 напряжения на вход усилителя 11
у-г / X V с весовым коэффициентом 7( ч)
поступает постоянное напряжение,
Ib4
где X - вел1-гчина, пропорциональная координате точки удара; 5 - длина моделируемого пружинного элемента, Сигнал с выхода усилителя I1 поступает на вход умножителя 12, на второй вход которого поступает сигнал с выхода датчика 3, пропорциональный силе соударения. На выходе умножителя 12, таким образом, формируется сигнал, пропорциональный
-S- .--5-U(t,P).
Этот сигнал поступает ратора 13 с весовым
. ---, где К
m-g
ду интегратора 13 подключен его выход через последовательно соединенные интегратор 14 и усилитель 15.Интеграторы 13,14 и усилитель 15 вместе формируют передаточную функцию
W(P) , а вместе с обратной
Кг
связью - передаточную функцию вида
Общая передаточная функция 10 моделирования передаточных функций равн а
Сигнал с выхода генератора 27, пропорциональный электромагнитной силе , дейстВумцей на моделируемый пружинный элемент, поступает на второй вход умножителя 18, на первый вход которого поступает постоянное напряжение от источника 31 через усилитель 17 с весовым коэффициентом
5 I - И
2ЕЗ i 3 V
На выходе умножителя 18, зом, формируется cHTkaJT, нальный 1
X
2ЁЛ
- - 1
3
1 Р }о
Остальная часть второго блока 16 моделирования передаточных функций должна моделировать передаточную функцию
гЧ|- г
т
12
f
Т
, . 1
2 f
1 +r.
где К , - m -г- ,
Так как совпадает с пе- +)
редаточной функцией блоков 13, 14 и 15, то схема также должна включать интеграторы 19, 20 и усилитель 21 с сумматором 22, который первым входом соединен с выходом усилите- ля 21 с весовым коэффициентом о
а BTopbtM входом с весовым коэффициентом -г- - с выходом источника 31
постоянного напряжения. Таким образом, на выходе второго блока 16 моделирования передаточных функций 1 эделируется передаточная функция
Блоки 23 и 24 вьтолнены в виде усилителей 25 и 26 с весовыми коэффи х
циентами соответственно -,-г- и
4ЕЭ
х 24§3 выходах формируются
соответственно 1
4EJ
)
Суммирование в блоке 29 выходов блоков 10, 16, 23 и 24 позволяет сформировать необходимый сигнал, представляющий правую часть уравнения
(4).
Контроль над процессом движения точек соударяющихся пружинных, элементов, т.е. моделируемого элемен- та 2, осуществляв 1 ся следующим образом. Свет из источника 5 пад.ает на пружинный элемент 2, совершающий виброударные колебания Теневое изображение пружинного элемента 2 увели- чивается в поперечном направлении объективами 6 и проектируется на све- торассеивающий экран 7. На обратной стороне экрана установлен фоторегист- рирующий элемент 8. Колебания теневого изображения пружинного элемента 2 вызывает соответствующие колебания интенсивности света, падающего на элемент 8. Колебания интенсивности света превращаются в фототоки и подаются в индикатор 9. Применение цилиндрического объектива 6 позволяет увеличить изображение пружинного элемента 2 в поперечном направлении до 50 раз при незначительном увеличении его в продольном направлении.
Таким образом, изменяя коэффициент В в блоках моделирования передаточных функций и контролируя ударное взаимодействие пружинных элементов
с помощью системы измерения, можно моделировать виброударную систему, состоящую из двух плоских пружинных элементов, а также определять оптимальные соотношения их ДЛР:Н обеспечивающих заданное качество контактирования. Изменяя также форму и амплитуду сигнала на выходе блока 27, можно определять параметры электромагнитной управляющей цепи, обеспечивающие заданное качество работы рассматриваемого ударного механизма.
Формулаизобретения
1. Устройство для полунатурного моделирования виброударных механических систем, содержащее четыре блока моделирования передаточных функций, блок определения положения ударного элемента, блок имитации удара, выполненный в виде электромеханического преобразователя, и датчик силы, отличающееся тем, что, с целью расширения функциональных возможностей за счет учета характеристик соударяющихся плоских пружинных элементов, в него введены- блок имитации электромагнитной силы, вьтолненный в виде генератора элект
рических колебаний, усилитель, источник напряжения, рама, на которой консольно закреплен пр окинный элемент, и оптический проекционный блок измерения положения пружинного эле- мента, оптическая ось которого ориентирована ортогонально плоскости колебаний пружинного элемента,причем первый блок моделирования пере- даточньгк функций содержит первый усилитель, умножитель, первый и второй интеграторы и второй усилитель, второй блок моделирования передаточных функций содержит первый усили тель, умножитель, первый и второй интеграторы, второй усилитель и сумматор, третий и четвертьй блоки моделирования передаточных функций выполнены в виде усилителей, блок определения положения ударного элемента выполнен в виде сумматора, электромеханический преобразователь блока имитации удара размещен над пружинным элементом, а датчик силы прикреплен к свободному концу пру- жинного элемента, при этом выход первого усилителя первого блока моделирования передаточных функций подключен к первомувходу умножителя этого блока, выход умножителя под- ключен к первому входу первого интегратора первого блока моделирования передаточных функций, выход которого через второй интегратор и второй усилитель этого блока подключен к первому входу сумматора блока определения положения ударного элемента и к второму входу первого интегратора первого блока моделирования передаточных функций, выход первого усилителя второго блока моделирования передаточных функций подключен к первому входу умножителя этого блока, выход умножителя подключен к первому входу первого интеграто-
Редактор И.Рыбчед ко
Составитель Г.Зелинский Техред О.Сопко
Заказ .441.4/48Тираж 671. Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д,4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
20
5 0 5р30г354045
ра второго блока моделирования передаточных функций, выход которого через второй интегратор и второй усилитель этого блока подключен к второму входу первого интегратора второго блока моделирования передаточ-- ных функций и к nepBONry входу сумматора этого блока, выход которого подключен к второму входу с тчматора блока определения положения ударного элемента, выход которого соединен с входом электромеханического преобразователя блока имитации удара, выход датчика силы через усилитель подключен к второму входу умножителя первого блока моделирования передаточных функций, выход генератора электрических колебаний блока имитации электромагнитной силы подключен к входам усилителей третьего и четвертого блоков моделирования передаточных функций и к второму входу умножителя второго блока моделирования передаточных функций, выход источника напряжения подключен к входам первых усилителей первого и второго блоков моделирования передаточных функций и к второьгу входу су тматора второго блока моделирования передаточных функций, а выходьт усилителей третьего и четвертого блоков моделирования передаточных функций подключены соответственно к третьему и четвертому входам сумматора блока определения положения ударного элемента.
2, Устройство по п.1, отличающееся тем, что, оптический проекционный блок измерения положения пружинного элемента содержит последовательно размещенные на оптической оси источник света, щ-тиндри- ческий объектив, экран и фоторегист- рирующий элемент, соединенный с индикатором.
Корректор В«Бутяга

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования виброударных механических систем | 1977 |
|
SU714420A1 |
| Устройство для полунатурного моделирования червячного привода станка | 1987 |
|
SU1522247A1 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Устройство для моделирования ударных систем | 1973 |
|
SU451102A1 |
| Устройство для моделирования колебаний гусеничных машин | 1982 |
|
SU1023366A2 |
| Устройство для моделирования гидравлической системы дистанционного управления давлением в тормозах колес | 1985 |
|
SU1264213A1 |
| Устройство для моделирования статических и динамических характеристик привода координатно-шлифовального станка | 1983 |
|
SU1113817A1 |
| Устройство для полунатурногоМОдЕлиРОВАНия | 1976 |
|
SU822218A2 |
| Устройство для моделирования удара тела о неподвижную преграду | 1985 |
|
SU1381341A1 |
Изобретение относится к области машиностроения и может быть использовано для автоматизированного динамического синтеза плоских пру- :жиннь Х элементов коммутирующих управляемых устройств. Целью изобретения является расширение функ- пиональных возможностей за счет учета характеристик соударяюшдхся плоских пружинных элементов. Цель достигается путем введения рамы с кон- сольно прикрепленным пружинным элементом, к свободному концу которого прикреплен датчик силы, блока имитации электромагнитной силы и дополнительного оптического проекционного блока измерения положения пружинного элемента. 1 з - п. ф - лы, 1 ил. СО 1C ел 0 L-PcSJ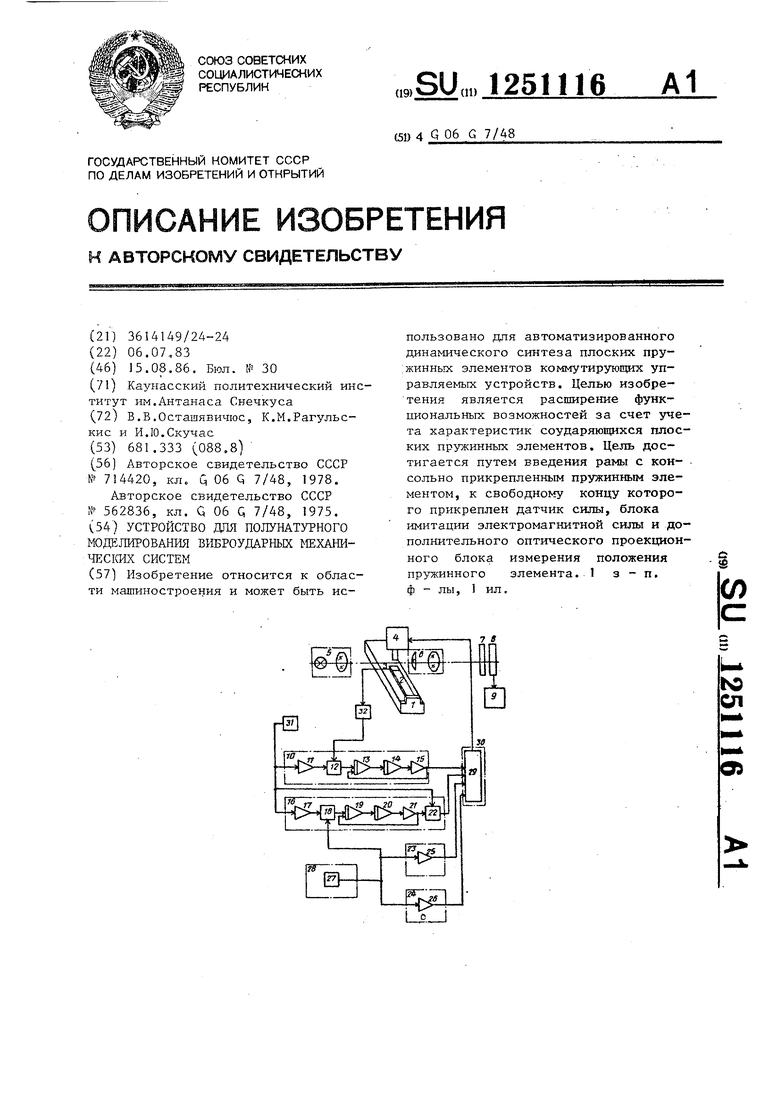
| Устройство для моделирования виброударных механических систем | 1977 |
|
SU714420A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Авторское свидетельство СССР № 562836, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
