QO
со
Изобретение относится к автоматизации прокатного производства и может быть использовано, преимущественно, для поддержания режима свободной прокатки в межклетевых промежутках непрерывного сортового стана.
Цель изобретения - повышение точности прокатки путем стабилизации режима свободной прокатки по всей длине прокатываемого металла.
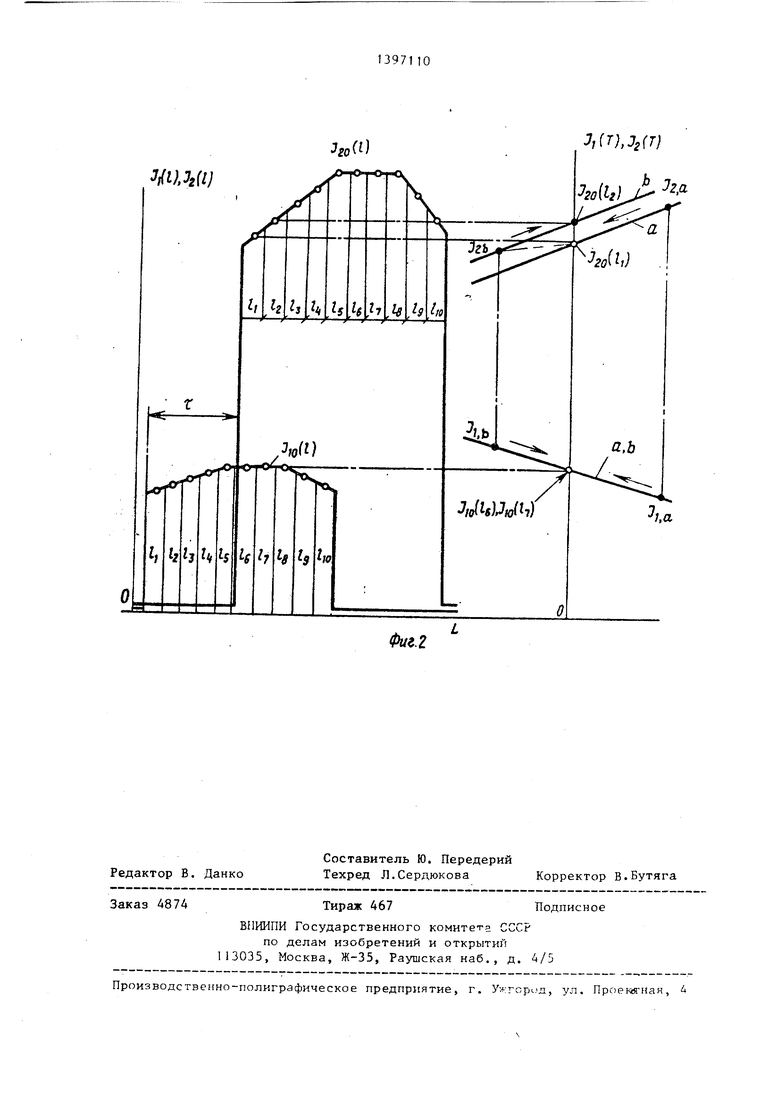
На фиг, 1 представлена блок-схема устройства стабилизации натяжения проката на непрерывном стане; на фиг. 2 - графики тока первой и второй и графики линейной зависимости токов первой и второй клетей.
Устройство стабилизации натяжения проката на непрерьтном стане содержит системы 1 и 2 регулирования частоты вращения электродвигателей соседних клетей, датчик 3 наличия проката, датчики 4 и 5 тока якоря элек- трор;вигателей предьщущей и последующей клетей, элемент 6 выдержки времени, блок 7 отклонения тока якоря электродвигателя предьщущей клети, ИН тегратор 8, блок 9 регулируемого запаздывания, блок 10 деления, блок 11 памяти, блок 12 умножения, элемент 13 сравнения, ключ 14, яуль-орган 15, пороговый элемент 16 и блок 17 коммутации с двумя коммутируемыми и двумя управляющими входами, причем выход датчика 4 тока якоря электродвигателя предыдущей клети соединен с входом блока 7 отклонения тока якоря электродвигателя предыдущей клети, выход датчика 3 наличия металла со-. единен с входом элемента 6 вьщержки времени и с управляющим входом блока 7 отклонения тока яко ря электродвигателя предыдущей клети, выход интегратора 8 соединен с входом системы 1 регулирования частоты вращения электродвигателя предьщущей клети, выход блока 10 деления соединен с входом блока 11 памяти, управляющий вход ко-п торого соед1 нен с выходом элемента 6 вьщержки времени, а выход - с одним из входов блока 12 умножения, выход блока 9 регулируемого запаздывания со единен с другим входом блока 12 умножения, а также с входом порогового элемента 16 и с первым входом блока 10 деления, выход блока 12 умножения соединен с первым входом элемента 13 сравнения, вькод датчика 5 тока якоря электродвигателя последующей кле
0
5
0
5
0
5
0
5
0
ти соединен с вторым входом элемента 13 сравнения и вторым входом блока 10 деления, а выход датчика 4 тока якоря электродвигателя предьщущей клети соединен через ключ 14 с входом блока 9 регулируемого запаздывания, управляющий вход ключа 14 соединен с выходом нуль-органа 15, выход блока 7 отклонения тока якоря электродвигателя предьщущей клети соединен с первым коммутируемым входом блока 17 коммутации, а соответствующий этому входу управляющий вход блока 7 коммутации - с выходом элемента 6 выдержки времени, выход элемента 13 сравнения соединен с вторым коммутируемым входом блока 17 коммутации, а соответствующий этому входу управляющий вход - с выходом порогового элемента 16, выход блока 17 коммутации соединен с входом интегратора Бис входом нуль-органа 15.
Устройство работает с-педующим образом.
В основе работы устройства лежат следующие исходные положения..
Величина тока якоря электродвигателя, например, первой клети в режиме свободной прокатки зависит от геометрических размеров сечений исходной заготовки, ее температуры и других факторов. Так как эти факторы непостоянны по длине заготовки, то ток 1, якоря электродвигателя этой клети при свободной прокатке также изменяется по ее длине. График тока ) (фиг.2) показан на участках 1,1,...,1 . Таким образом, ток 1|с|(1) несет в себе информацию о непостоянстве технологических факторов.
При условии соблюдения режима свободной прокатки, например между первой и второй клетями ток (l) якоря электродвигателя второй клети в режиме свободной прокатки на участках 1 ,1 ,... ,1 (, подобен току якоря электродвигателя первой клети, на этих же участках, т.е. 1(1} ), Коэффициент k подобия
тока I ,д току I,. зависит только от
fo
соотношения обжатий проката в этих клетях, которое в процессе прокатки сохраняется постоянным. Из графика тока ,(l) второй клети (фиг. 2) следует, что при соблюдении режима свободной прокатки соблюдаются и условия
Ijodi) () ) f
I,o(l) ,... ,12(1,5) - k,,-(l,,).
Кроме этого на фиг, 2 показангр что в момент входа участка 1, во вторую клеть в первой клети находится участок 1 заготовки. Это связано с тем, что в течение временного интервала перемещения заготовки от первой до второй клети действует фактор транспортного запаздывания. Во время нахождения во второй клети участков Ij в первой клети находятся соответственно участки 1 д .
Алгоритм работы устройства построен следующим образом (фиг. 2).
В течение временного интервала , т.е. в течение времени перемещения начала заготовки от первой до второй клети, измеряется и запоминается ток свободной прокатки электродвигателя
первой клети ,), 1( ,..,1 (1,) на соответствующих участках заготовки.
При захвате начала заготовки валками второй клети т.е. в момент заполнения участком 1 очага деформации этой клети, измеряется ток нагрузки электродвигателя первой клети. Если в этой ситуации ток этого электродвигателя окажется равным току свободной прокатки I,p(lp на участке 1/, это расшифровывается как признак :ре- жима свободной прокатки. При наличии этого признака измеряется ток ,) электродвигателя второй клети на участке 1. заготовки. Величина этого тока также соответствует режиму свободной прокатки. Затем вычисляется коэффициент подобия токов ,) /I. (1), соответствующий условию прокатки участка 1 заготовки сначала в первой, а затем во второй клети. Вычисленное значение коэффициента запоминается.
Если при входе участка 1, заготовки во вторую клеть ток электродвигателя первой клети окажется не равным току I. (1,), то это расшифровывается как отсутствие режима свободной прокатки, при 1 1.(1) - как режим натяжения проката, а при 1 ) - как режим сжатия. В обоих этих случа- ях вырабатывается воздействие соответствующего знака на скорость валков электродвигателя первой клети, которое изменяет ток нагрузки этого
5
5
0 5
0
электродвигателя до тех пор, покя он не станет равным току 1( 1 i .
Пусть, например, скорости валков до прокатки установлены так, что при захвате валками второй клети л прокате возникли усилия натяжения, которые Еызвапи уменьшение тока электродвигателя первой клети до значения If. а. На фиг. 2 Ьоказаны графики линейной зависимости токов 1(Т) первой и 12(т) второй клети от продольных усилий Т в прокате и в качестве примера график в ситуации а, которая соответствует рассматриваемому случаю. -Здесь скорость валков первой клети увеличивается для того, чтобы устранить натяжение. При этом ток начинает расти от значения I,, а, до значения If|j(l) изменяясь в направлении, указанном стрелкой, на графике I (Т) для ситуации а. Одновременно с этим ток электродвигателя второй клети претерпевает следующие изменения. Так как натяжения в прокате уменьшает ток электродвигателя первой клети (переднее натяжение) и увеличивает ток электродвигателя второй клети (заднее натяжение), то в ситуации а начальньй ток I2 а оказывается большим, чем ток ,) . Изменение скорости валков первой клети вызывает уменьшение тока 1, а, который начинает изменяться в направле1П1и указанной стрелкой.
В соответствии с работой алгоритма, изменение скорости валков первой клети осуществляется до тех пор, пока ток I, не станет равным величине Ijj(lj), которое нам известно. Тогда ток электродвигателя второй клети снизится до значения 12(1,) в полосе исчезнут продольные усилия и будет ор- . ганизован режим СБОбодной прокатки.
В момент достижения этого режима измеряется ток , ) , а затем вычисляется и запоминается коэффициент подобия k также как описано ранее.
Знание величины коэффициента k
П
которая установлена в момент олнопри- менного пребывания участка 1 заготовки в валках второй клети -и участка 1 в первой, позволяет определить токи свободной прокатки во BTOpoi i клети на участках от 1, до 1 по формулам I2o(l,) k,j I,po ), l-0o -4i
k j-Ij/lj) и т.д. та как токи ij. Ijpdj),..., 1((1,) нам изнесткы. Следовательно, для случая олнгоременно
го нахождения участка I заготовки в первой клети и участка I, во второй есть информация о величине тока 1.(12) для второй клети и отсутствует информация о токе (1) для пер- вой. Наличие информации о величине тока ) позволяет перейти к режиму свободной прокатки, затем определить и запомнит, величину тока и в последующем определить величину тока 7) .
Для случая нахождения участка 1 заготовки во второй клети и участка 1 в первой показан пример, в котором ток ,) ° О это обстоятельство заранее не известно и должно быть установлено по известной информации о величине тока ) (фиг. 2).
В связи с тем, что ) ) то даже при условии (l) ) произойдет нарушение режима свободной прокатки. Пусть, например, это вызовет возникновение продольных сил сжатия в прокате. Тогда ток ) для ситуации а изменится до величины 1 , b для ситуации в, которой соответствует новый линейный график тока I,j(T), проходящий через известную по величине координату ). При обнаружении режима сжатия .(l) вырабатывается воздействие на скорость валков первой клети в сторону уменьшения этой скорости. При этом ток электродвигателя второй клети, изменяясь в направлении, указанном стрелкой, стремится принять значение (1.), а ток электродвигателя первой клети уменьшается от значения I J . Изменение скорости валков прекратится тогда, когда ток электродвигателя второй клети станет равным IjjCl). Ток первой кЛети при этом достигает значения 1(1), которое до регулирования скорости валков не- известно.
Это неизвестное значение определяется, запоминается, а затем через коэффициент k j подобия токов позволяет определить величину тока (l).
По мере дальнейшего перемещения участков заготовки через прокатные клети описанный режим работы алгоритма сохраняется, что позволяет определить токи I,(lg), 1,(15) и т,д., токи ), ) и т.д, и обеспечить режим свободной прокатки вплоть до полного прохождеиия заготовки че- рез клети.
5
5 0 5
0
5
Устройство работает следующим образом.
. В исходном состоянии до поступле- ния заготовки в валки предьдущей клети задается частота вращения электродвигателей соседних клетей. Ключ 14 замкнут, а ключи 22 и 23 блока 17 коммутации разомкнуты. Устройство подготовлено к работе.
После захвата заготовки валками предыдущей клети, ее передний конец перемещается к последующей клети. В, течение этого перемещения ток якоря электродвигателя предьодущей клети является током свободной прокатки. Сиг нал, пропорциональный величине этого тока, поступает от датчика 4 через ключ 14 на вход блока 9 регулируемого запаздывания и появляется на выходе этого блока через временной интервал, равный времени перемещения переднего конца заготовки от предыдущей клети до последующей. Величина транспортного запаздывания пропорциональна частоте вращения валков предыдущей клети, измеряемой датчиком 24 частоты вращения, входяпщм в состав системы 1. В течение перемещения переднего конца заготовки от предьщу- щей клети до последующей сигнал с датчика 4 тока якоря поступает также на вход блока 7 отклонения тока якоря электродвигателя предьщущей клети,
В момент захвата переднего конца заготовки валками последующей клети срабатывает датчик 3 наличия металла, На выходе элемента 6 вьщержки времени появляется сигнйл, ключ 22 в блоке 1 7 коммутации замыкается и к входу интегратора 8 подключается первый канал регулирования частоты вращения валков предьздущей клети, В элементе 18 памяти блока 7 при поступлении на его управляющий вход сигнала с датчика 3 наличия металла запомнится величина тока якоря электродвигателя предьздущей клети, который соответствует режиму свободной прокатки, а на элементе 19 сравнения выполняется сравнение запомненного значения тоКа свободной прокатки со значением тока, полученного после захвата переднего конца заготовки валками последующей клети. Сигнал рассогласования с выхода блока 7 поступает через ключ 22 блока 17 коммутации на вход интегратора 8. В зависимости от величинь и знака этого сигнала интегратор 8, воздействуя на систему 1, вызывает
корректировку частоты вращения электродвигателя предьиущей клети до тех пор, пока в,межклетевом промежутке не установится режим свободной прокатки. После установления в межклетевом про- межутке режима свободной прокатки и отсчета вьщержки времени элементом 6 ключ 22 размыкается, а ключ 23 замыкается благодаря соответствующим сиг- налам от элементов 20 и 21 блока 17 коммутации. При этом первый канал регулирования частоты вращения валков предьиущей клети выводится из работы и к входу интегратора 8 подключается второй канал регулирования. Исчезновение сигнала на выходе элемента 6 вьщержки времени вызьшает также включение блока 11 памяти. В этот блок из блока 10 вносится и запоминается ве- личина отношения тока свободной прокатки электродвигателя последующей клети к току свободной прокатки электродвигателя предьиущей, сдвинутому во времени на величину транспортного запаздывания, указанное соотношение вычисляется в блоке 10 деления. Значение тока с пыхода блока 9 регулируемого запаздывания умножается в блоке 12 на хранящуюся в блоке 11 памя- ти величину отношения токов электродвигателей при свободной прокатке. Выходной сигнал блока 12 умножения поступает на вход элемента 13 сравнения как задание тока свободной hpo- катки электродвигателя последующей клети.
На элементе 13 это задание тока сравнивается с текущим значением тока электродвигателя последующей клети и -в зависимости от величины и знака разности между ними система 1 корректирует частоту вращения электродвигателя предьздущей клети до тех пор, пока в межклетевом промежутке не установится режим свободной прокатки. При этом сигнал о токе якоря свободной прокатки электродвигателя предыдущей клети, соответствукиций уже новому участку заготовки, который начал прокатываться в данный момент в предыдущей клети, вводится в блок 9. регулируемого запаздывания, чем подготавливается текущая информация для дальнейшей работы устройства. Описанный режим работы повторяется до момента выхода металла из валков предыдущей клети.
- 10is 20 25 зо
35
40
45
0
Однако во время регулирования частоты вращения валков предьщущей клети ток якоря электродвигателя этой клети зависит также от межклетевых усилий и, поэтому, эти значения тока не могут использоваться в дальнейшем для определения тока свободной прокатки электродвигателя последующей клети. В, связи с этим в устройство введены нуль-орган 15 и ключ 14. При появлении на выходе блока 17 коммутации сигнала коррекции частоты вращения валков предыдущей клети срабатывает нуль-орган 15, размыкается ключ 14 и доступ искаженных значений тока якоря электродвигателя предьщу- щей клети от датчика 4 в блок 9 регулируемого запаздывания прекращается. После исчезновения сигнала коррекции, когда в межклетевом промежутке установится режим свободной прокатки нуль-орган 15 возвращается в исходное состояние, ключ 14 замыкается и на вход блока 9 регулируемого запаздывания снова поступают от датчика 4 тока якоря электродвигателя предьщущей клети, соответствующие режиму свободной прокатки.
В периоды коррекции частоты вращения валков размыкание ключа 14 соответствует ситуации, когда на вход блока 9 регулируемого запаздывания поступает сигнал, величина которого равна нулю. При появлении такого сигнала на выходе блока 9 возникает неопределенность в оценке тока свободной прокатки электродвигателя последующей клети, что может привести к неправильному выбору устройством корректирующего воздействия. Поэтому в устройство введен пороговый элемент 16. При исчезновении сигнала на выходе блока 9 регулируемого запаздывания происходит срабатьшание порогового элемента .16, который воздействуя на управляющий вход блока 17 коммутации размыкает ключ 23 и отключает на этот период времени второй канал регулирования.
Таким образом, введение в известное устройство второго канала регулирования дает возможность определять значения тока свободной прокатки электродвигателя последукацей клети по значениям тока свооодной прокатки электродвигателя предьщущей клети сдвинутых во времени, на величину транспортного запаздыванияj что позволяет обеспечить режим свободной про- прокатки по всей длине прокатываемого металла, без применения специальных измерителей технологических возмущений действующих со стороны заготовки.
Формула изобретения
Устройство стабилизации натяжения проката на непрерывном стане, содержащее системы регулирования частоты вращения электродвигателей соседних клетей, датчик наличия проката, дат- чнки тока якоря электродвигателей предыдущей и последующей клетей, элемент выдержки времени, блок отклонения тока якоря электродвигателя предьщущей клети и интегратор, причем выход дат- чика тока якоря электродвигателя предыдущей клети соединен с входом блока отклонения тока якоря электродвигателя предыдущей клети, выход датчика наличия металла соединен с вхо- дом элемента вьщержки времени и с управляющим входом блока отклонения тока якоря электродвигателя предьщущей клети, выход интегратора соединен с входом системы регулирования частоты вращения электродвигателя предьщущей клети, отличающееся тем, что, с целью повышения точности прокатки путем стабилизации режима свот бодной прокатки по всей длине прокаты ваемого металла, в устройство дополнительно введены блок регулируемого запаздывания, блок деления, блок па
0
5 0 25 зо ,
мяти, блок умножения, элемент сравнения, ключ, нуль-хэрган, пороговый элемент и блок коммутации с двумя коммутируемыми и двумя управляющими входами, причем выход блока деления соединен с входом блока памяти, управляющий вход которого соединен с выходом элемента вьщержки времени, а выход - с одним из входов блока умножения, выход блока регулируемого запаздывания соединен с другим входом бло ка умножения, а также с входом порогового элемента и с первым входом блока деления, выход блока умножения соединен с первым входом элемента ния, выход датчика тока якоря электродвигателя последующей клети соединен с вторым входом элемента сравнения и вторым входом блока деления, а выход датчика тока якоря электродвигателя предьщущей клети соединен через ключ с входом блока регулируемого запаздывания, управляющий вход ключа соединен с выходом нуль-органа, выход блока отклонения тока нагрузки электродвигателя предьщущей клети соединен с первым коммутируемым входом блока коммутации, а соответствующий этому входу управляющий вход блока коммутации - с выходом элемента выдержки времени, выход элемента сравнения соединен с вторым коммутируемым входом блока коммутации, а соответствующий этому входу управляющий вход - с выходом порогового элемента, выход блока коммутации соединен с входом интегратора и нуль-органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения межклетевого натяжения проката | 1985 |
|
SU1247114A1 |
| Устройство для управления скоростным режимом двигателей смежных клетей сортопрокатного стана | 1975 |
|
SU535123A1 |
| Способ управления установкой межклетевого охлаждения полосы в процессе непрерывной горячей прокатки и устройство для его реализации | 1980 |
|
SU1011289A1 |
| Устройство для измерения межклетевых натяжений проката | 1983 |
|
SU1101310A2 |
| Устройство для измерения межклетевых натяжений | 1982 |
|
SU1045972A2 |
| Устройство для стабилизации температуры полосы в чистовой группе стана горячей прокатки | 1979 |
|
SU869892A1 |
| Устройство регулирования натяжения в межклетевом промежутке прокатного стана | 1990 |
|
SU1722638A1 |
| Устройство для измерения межклетевых натяжений проката | 1982 |
|
SU1039600A1 |
| Устройство контроля заполнения межклетевого промежутка при многониточной прокатке | 1985 |
|
SU1308411A1 |
| Устройство для регулирования скорости двигателя | 1981 |
|
SU970331A2 |
Изобретение относится к автоматизации прокатного производства и может использоваться для поддержания режима свободной прокатки в межклетевых промежутках непрерывного сортового проката. Цель изобретения - стабилизация режима свободной прокатки по всей длине прокатываемого металла. Устройство содержит систему 1 регулирования частоты вращения электродвигателей валков соседних клетей, датчик 3 наличия, проката, датчик 4 тока, элемент 6 выдержки времени, блок 7 отклонения тока нагрузки электродвигателя предьщущей клети и интегратор 8. Достижение цели обеспечивается введением блока 9 регулируемого запаздывания, блока 10 деления, блока 12 умножения, ключа 14, нуль-органа 15, порогового элемента 16 и блока 17 коммутации. 2 ил. S сл
| Способ приготовления состава для пропитывания перед рентгенизацией объектов | 1931 |
|
SU35561A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
