ментодержателями (ПИ) 14 и 15. В связи t: тем, что кинематическая цепь зубчатых элементов: сателлитов 9, ПШ 8 относительно геометрических осей зубчатых колес 3 расположена в противо- фазе, перемещение ПИ 14 и 15 происходит в противоположных направлениях. Величина их перемещения может изменяться сменой приводных водил. Перемещением ПИ 14 и 15 совершается технологическая операция. Конструкция позволяет без увеличения размеров приводной части исполнительного механизма увеличить ход ползунов-инстру- ментодержателей. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный механизм плоскоклиновыхВАльцОВ | 1979 |
|
SU846000A1 |
| УСТРОЙСТВО для ОБРАБОТКИ ДЕТАЛЕЙ ШВЕЙНЫХ ИЗДЕЛИЙ по ЗАДАННОМУ КОНТУРУ | 1968 |
|
SU217197A1 |
| Реверсивный привод литероносителя | 1978 |
|
SU1101365A1 |
| ШИРОКОДИАПАЗОННАЯ РЕВЕРСИВНАЯ ТРАНСМИССИЯ | 2020 |
|
RU2729847C1 |
| Устройство для шлифования цилиндрических и конических отверстий | 1968 |
|
SU345743A1 |
| Рычажный пресс для тиснения | 1991 |
|
SU1802797A3 |
| МОТОКОСИЛКА | 1992 |
|
RU2050096C1 |
| СТАНОК-КАЧАЛКА | 2012 |
|
RU2506457C1 |
| Устройство для обрезки сучьев с деревьев | 1980 |
|
SU891444A1 |
| СТАНОК-КАЧАЛКА | 2012 |
|
RU2506455C1 |

1
Изобретение относится к обработ- Кб металлов давлением и может быть использовано при производстве профилированных цилиндрических изделий.
Целью изобретения является расширение технологических возможностей путем увеличения хода ползунов-ин- струментодержателей.
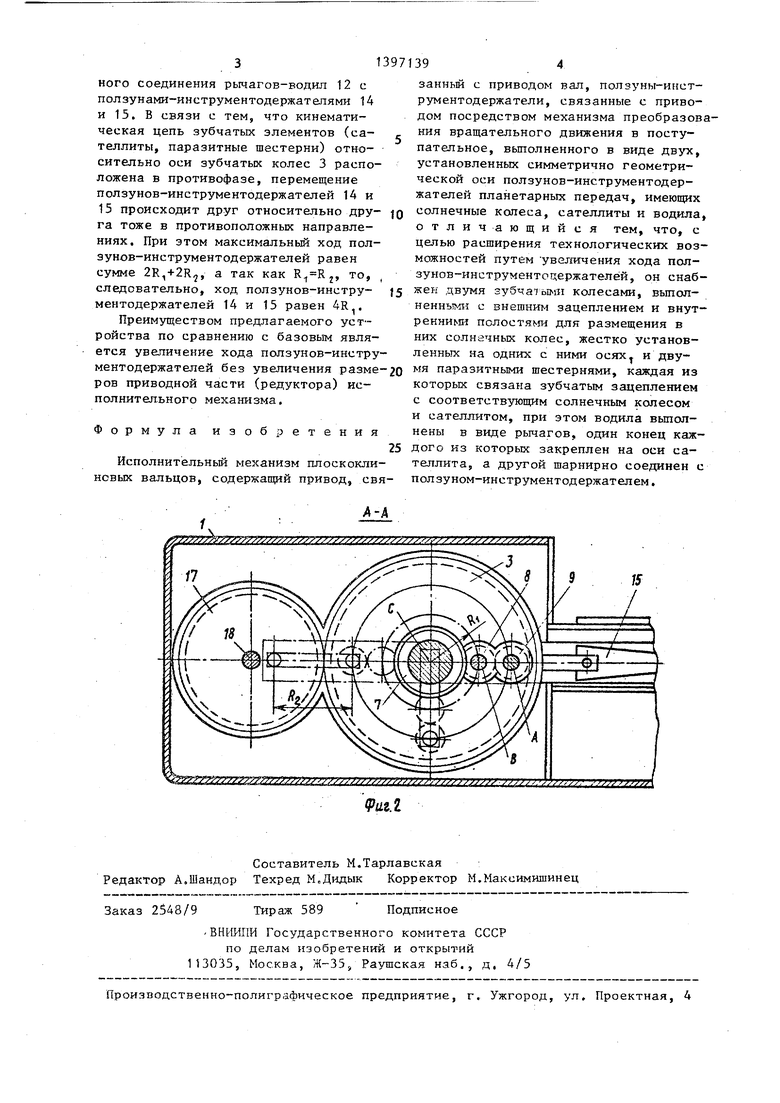
На фиг. 1 показан исполнительньй механизм, общий вид, на фиг. 2 - сечение А-А на фиг. 1 (с тремя положениями приводного рычага-водила).
Исполнительньй механизм плоскоклиновых вальцов содержит корпус 1, разделенный на две части, в каждой из которых на осях 2 смонтированы зубчатые капеса 3 с наружными зубчатыми венцами 4 и крьшками 5. Внутри каждого зубчатого колеса выполнены полости 6, в которых на осях 2 жестко смонтированы солнечные колеса 7, входящие взацепление с паразитными шестернями 8, связанными с сателлитами 9. Паразитные шестерни 8 и сателлиты 9 соответственно концами своих валов 10 и 11 с возможностью вращени вокруг своих осей смонтированы с одной стороны в торцовых частях зубчатых колес 3, а с другой - в их крьщ- ках 5.
На выходных концах валов 11 со стороны крьш1ек 5 жестко смонтированы приводные водила 12, вьшолненные в виде рычагов, шарнирно связанные вторыми концами через оси 13 с полззша- ми-инструментодержателями 14 и 15, Зубчатые колеса 3 зацепляются с шестернями 16 и 17 приводного вала 18, на котором установлен маховик 19, соединенньй через клиноременную передачу 20 со шкивом 21 электродвигател 22. Позициями 23 и 24 показаны шпонк
Буквами А, В, С, соответственно, по- оси сателлитов, паразитных шестерен и зубчатых колес.
Исполнительньй механизм работает
следующим образом.
Крутящий момент от электродвигателя 22 шкивом 21 через клиноременную. передачу 20 передается на маховик 19 и приводной вал 18 с шестернями 16 и 17, а следовательно, и на зубчатые колеса 3, Зубчатые колеса 3, вращаясь вращают в плоскости их вращения находящиеся в их полостях 6 сателлиты 9 с .паразитными шестернями 8. Паразитные шестерни 8 за счет обкатывания их по солнечным колесам 7 вращаются и вокруг своих осей, заставляя тем самым вращаться вокруг своих осей и сателлиты 9. При этом паразитные шестерни 8 вращаются в сторону вращения зубчатых колес, а сателлиты 9 - в противоположном направлении. В ре-.. зультате такого взаимодействия зубчатых колес 3 с .сателлитами 9 через паразитные шестерни 8 с солнечными колесами 7 оси сателлитов вращаются совместно с колесами с одинаковыми угловыми скоростями вокруг осей зубчатых колес 3. Расстояние между осями сателлитов 9 и зубчатых колес есть кривошип с радиусом R. Значит ход оси сателлита равен 2R,.
Совместно с вращением осей caTen- литов 9 вращается и один из концов
приводных водил 12, повторяя траекторию первых и перемещая эти приводные рычаги-водила в плоскости движения ползунов-инструментодержателей 14 и 15. Совместно с перемещением
осей соединений валов 11 и 10 с приводными водилами 12 перемещаются и эти водила совместно с осями шарниркого соединения рьгчагов-водил 12 с ползунами-инструментодержателями 14 и 15, В связи с тем, что кинематическая цепь зубчатых элементов (са- теллиты, паразитные шестерни) относительно оси зубчатых колес 3 расположена в противофазе, перемещение ползунов-инструментодержателей 14 и 15 происходит друг относительно дру- га тоже в противоположных направлениях. При этом максимальный ход ползунов-инструментодержателей равен сумме , а так как , то, следовательно, ход ползунов-инстру- ментодержателей 14 и 15 равен 4К.
Преимуществом предлагаемого устройства по сравнению с базовым является увеличение хода ползунов-инструментодержателей без увеличения разме ров приводной части (редуктора) исполнительного механизма.
Формула изобретения
Исполнитёльньй механизм плоскокли нсвых вальцов, содержащий привод, св Sf.Kififf fiffffSfSrffff .
Составитель М.Тарлавская Редактор А.Шандор Техред М Дидык Корректор М.Максимишинец
Заказ 25Д8/9
Тираж 589
ВНдаПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-33, Раушская наб., д. 4/5
занный с приводом вал, ползуны-инст- рументодержатели, связанные с приводом посредством механизма преобразовния вращательного движения в поступательное, выполненного в виде двух, установленных симметрично геометрической оси ползунов-инструментодержателей планетарных передач, имеющих солнечные колеса, сателлиты и водила отличающийся тем, что, с целью расширения технологических возможностей путем увеличения хода пол- зунов-инструментоцержателёй, он снабжен двумя зу5ча7ыми колесами, выполненными с внешним зацеплением и внут- ренниьш полостями для размещения в них солнечных колес, жестко установленных на одних с ними осях и двумя паразитными шестернями, каждая из которых связана зубчатым зацеплением с соответствующим солнечным колесом и сателлитом, при этом водила вьшол- нены в виде рычагов, один конец каждого из которых закреплен на оси сателлита, а другой шарнирно соединен с ползуном-инструментодержателем.
15
Подписное
| Исполнительный механизм плоскоклиновыхВАльцОВ | 1979 |
|
SU846000A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
