(54) ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПЛОСКО-КЛИНОВЫХ ВАЛЬЦОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный механизм плоскоклиновых вальцов | 1986 |
|
SU1397139A1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| Фрикционная планетарная передача | 2016 |
|
RU2617900C1 |
| Механизм привода промышленного робота | 1989 |
|
SU1660959A1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2017 |
|
RU2659681C1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1997 |
|
RU2132987C1 |
| Профиленастраиваемое устройство с однокоординатным числовым программным управлением для обработки матриц пресс-форм | 1974 |
|
SU557882A1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2019 |
|
RU2716781C1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
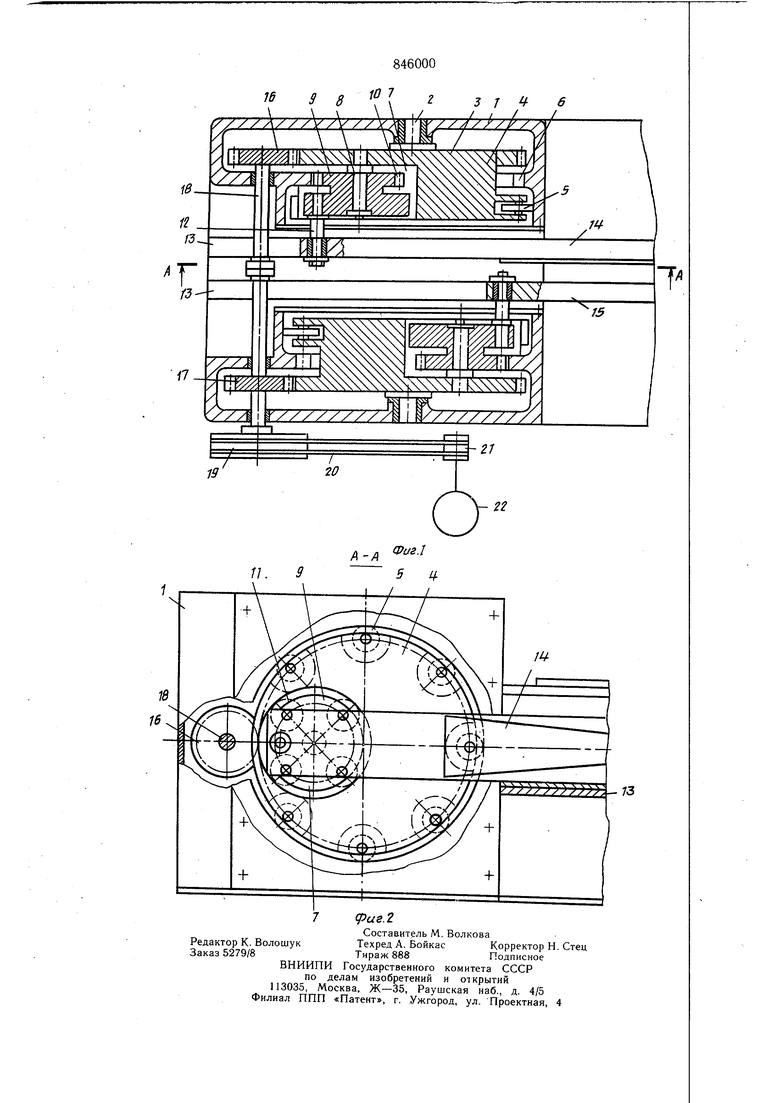
Изобретение относится к кузнечно-прессовому машиностроению. Известен исполнительный механизм ковочных плоско-клиновых вальцов, содержащий силовой орган в виде силовых цилиндров, связанных непосредственно с ползунами-инструментодержателями, перемещающимися по направляющим вальцов 1. Недостатком является то, что в таком исполнительном механизме трудно обеспечить быстроходную работу вальцов из-за наличия гидропривода. Известен также исполнительный механизм ковочных вальцов, содержащий привод, связанный с приводом вал, ползуны-инструментодержатели, связанные с приводом посредством механизма преобразования вра щательного движения привода в поступательное движение ползунов-инструментодержателей, выполненного в виде планетарной передачи внутреннего, зацепления, имеющей солнечное кольцо, сателлит и водило 2. Однако в данном исполнительном механизме во время работы возникают консольные нагрузки на осях водила и сателлита, что отрицательно сказывается на надежности и долговечности работы привода, а акже синхронизации движения инструме1та. Цель изобретения - обеспечение синхронизации движения расположенны с в противофазе ползунов-инструментодерж 1телей, повыщение надежности работы, увеличение срока службы и увеличение производительности. Поставленная цель достигается тем, что в исполнительный механизм плоскоклино 5ых вальцев, содержащий привод, связанный с приводом вал, ползуны-инструментодержатели привода, связанные с приводом посредством механизма преобразования вращательного движения в поступательное движение ползунов-инструментодержателей, выполненного в виде планетарной передачи внутр него зацепления, имеющей солнечное кс со, сателлит и водило, снабжен связан с валом второй планетарной передачей, тановленной симметрично относительно г вой планетарной передачи и геометричессой оси ползунов-инструментодержателей, и опорными катками, смонтированными на тупицах каждого сателлита, а также огорными катками, смонтированными на тор каждого водила с возможностью взаи действия с внутренней поверхностью солнечного колеса, причем каждое водило выполнено с полой ступицей, а опорные катки, смоптированные на ступице сателлита, установлены с возможностью взаимодействия с поверхностью, ограничиваю-щей полость ступицы водила. На фиг. 1 показан исполнительный механизм, общий вид; на фиг. 2 - сечение А-А на фиг. 1. Исполнительный механизм плоско-клиновых вальцов содержит корпус 1, разделенвый на две части, в каждом из которых смонтированы на осях 2 водило 3. На внешних поверхностях ступицы 4 водил смонтированы опорные катки 5, соприкасающиеся с внутренними поверхностями корпуса 1 солнечных колес 6. Внутри ступиц 4 водил 3 вьшолнены полости 7, в которых на осях 8, закрепленных в водилах, размещены ступицы 8 колес-сателлитов 10 с опорными катками 11, последние опираются на внутренние поверхности полостей ступиц водил. В колесах-сателлитах 10 смонтированы пальцы 12, оси которых совпадают с начальными окружностями солнечных колес 6, выполненных на корпусе 1. На пальцах 12 в направляющих 13 станины смонтированы ползуны-инструментодержатели 14 и 15. Зубья водил 3 входят в зацепление с шестернями 16 и 17 приводного вала 18. На приводном валу установлен маховик 19, соединенный ремнями 20 со шкивом 21 электродвигателя 22. Работа исполнительного механизма плос-, ко-клиновых вальцов осуществляется следующим образом. Крутящий момент от электродвигателя 22 со шкивом 21 передается через ремни 20 на маховик 19 и приводной вал 18 с шестернями 16 и 17, с последних крутящий момент передается на водила 3. Вращаясь, водила вращают насаженные на их оси 8 колесасателлиты 10, которые, обкатываясь по зубьям солнечных колес, совершают круговые движения. При совершении круговых движений колесами-сателлитами закрепленные в их ступицах пальцы 12, оси которых совпадают с диаметрами начальных окружностей солнечных колес, совершают прямолинейные возвратно-поступательные движения, а вместе с ними совершают такие же движения и ползуны-инструментодержатели 14 и 15. При вращении водил 3 и колес-сателлитов 10 вместе с ними вращаются их ступицы с опорными катками 5 и 11. При этом опорные катки 5 соприкасаются с внутренними поверхностями корпуса 1 солнечных колес 6, а опорные катки 11 опираются на внутренние поверхности полостей ступиц водил. За счет этого исключаются консольные нагрузки на осях 2 водил 3 и на осях 8 колес-сателлитов 10. Ползуны-инструментодержатели сохраняют синхронное перемещение, что обеспечивает качество изготовления изделий и уменьшает износ деталей с обеспечением надежной работы. Предлагаемое изображение позволяет получить экономию материальных средств до 10 тыс. рублей в год на одну машину. Формула изобретения Исполнительный механизм плоско-клиновых вальцов, содержащий привод, связанный с- приводом вал, ползуны-инструментодержатели, связанные с приводом посредством механизма преобразования вращательного движения привода в поступательное движение ползунов инструментодержателей, выполненного в виде планетарной передачи внутреннего зацепления, имеющей солнечное колесо, сателлит и водило, отличающийся тем, что, с целью повышения надежности работы, увеличения срока службы механизма и увеличения производительности, он снабжен связанной с валом второй планетарной передачей, установленной симметрично относительно первой планетарной передачи и геометрической оси ползунов-инструментодержателей, и опорными катками, смо нтированными на ступицах каждого сателлита, а также опорными катками, смонтированными на торцах каждого водила с возможностью взаимодействия с внутренней поверхностью солнечного колеса, причем каждое водило выполнено с полой ступицей, а опорные катки, смонтированные на ступице сателлита, установлены с возможностью взаимодействия с поверхностью, ограничивающей полость ступицы водила. Источники информации, принятые во внимание при экспертизе 1. Власов В. И. и др. Современные тенденции совершенствования ковочных вальцов, М., НИИМАШ, 1975, с. 58, рис. 30. 2. Авторское свидетельство СССР № 560680, кл. В 21 D 43/10, 03.05.77.
