Изобретение относится к области регулируемого электропривода, а также может быть использовано и дпя измерения параметров динамических звеньев в системах автоматического регулирования .
Под статическими параметрами понимаются коэффициенты передачи, под динамическими - постоянные времени.
Цель изобретения - расширение области применения способа за счет определения дополнительных динамических и статических параметров электропривода.
Электропривод постоянного тока является звеном второго порядка, а поэтому характеризуется двумя постоянными времени
Tjj - постоянной времени якорной цепи.
9vi постоянной времени электромеханической ,
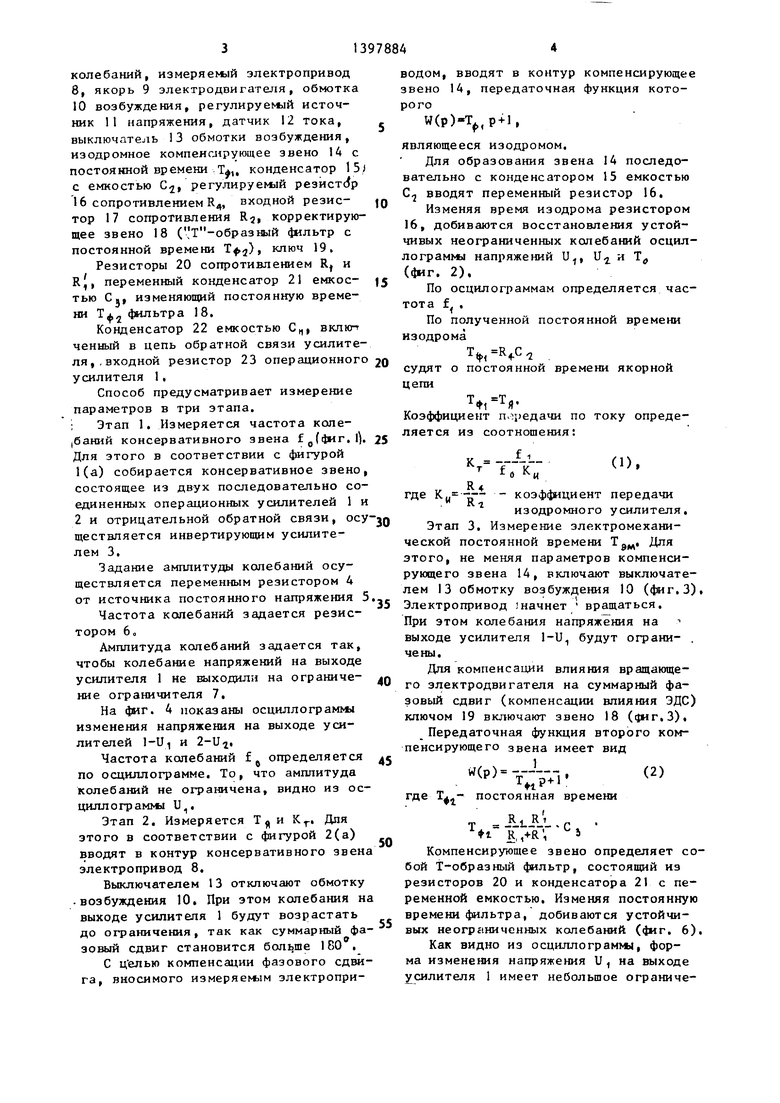
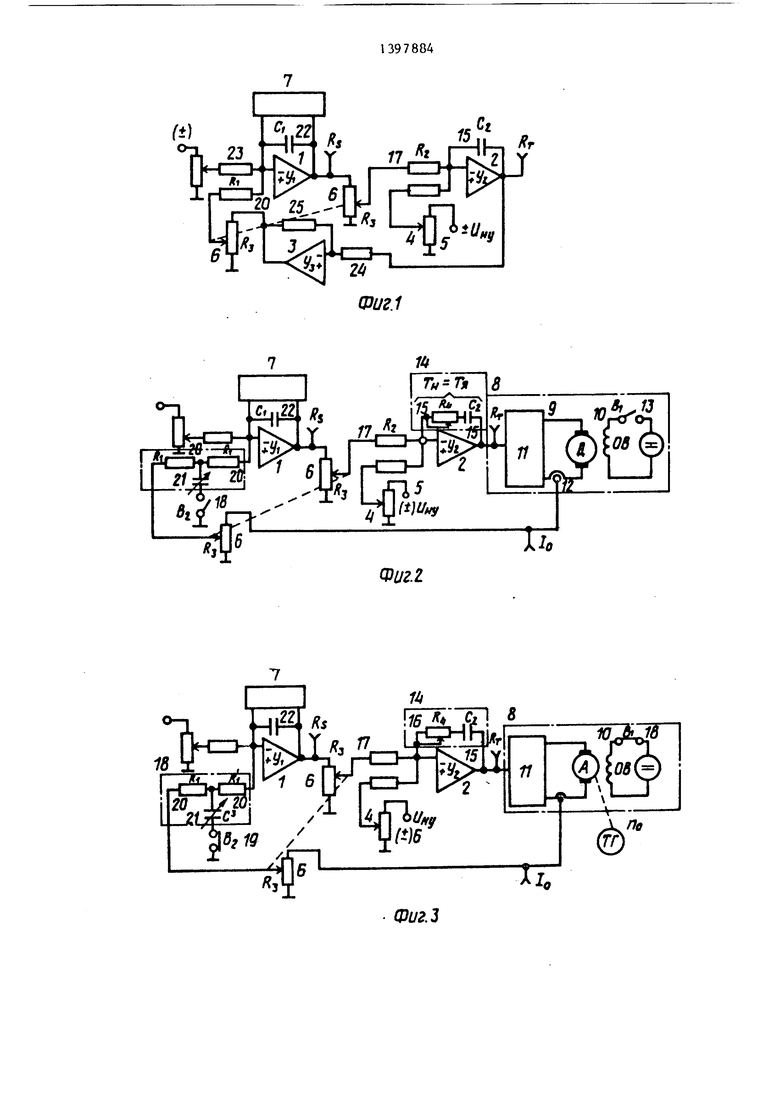
К - коэффициентом передачи по току. На фиг. 1, 2, 3 представлены устройства дпя измерения соответствующего параметра.
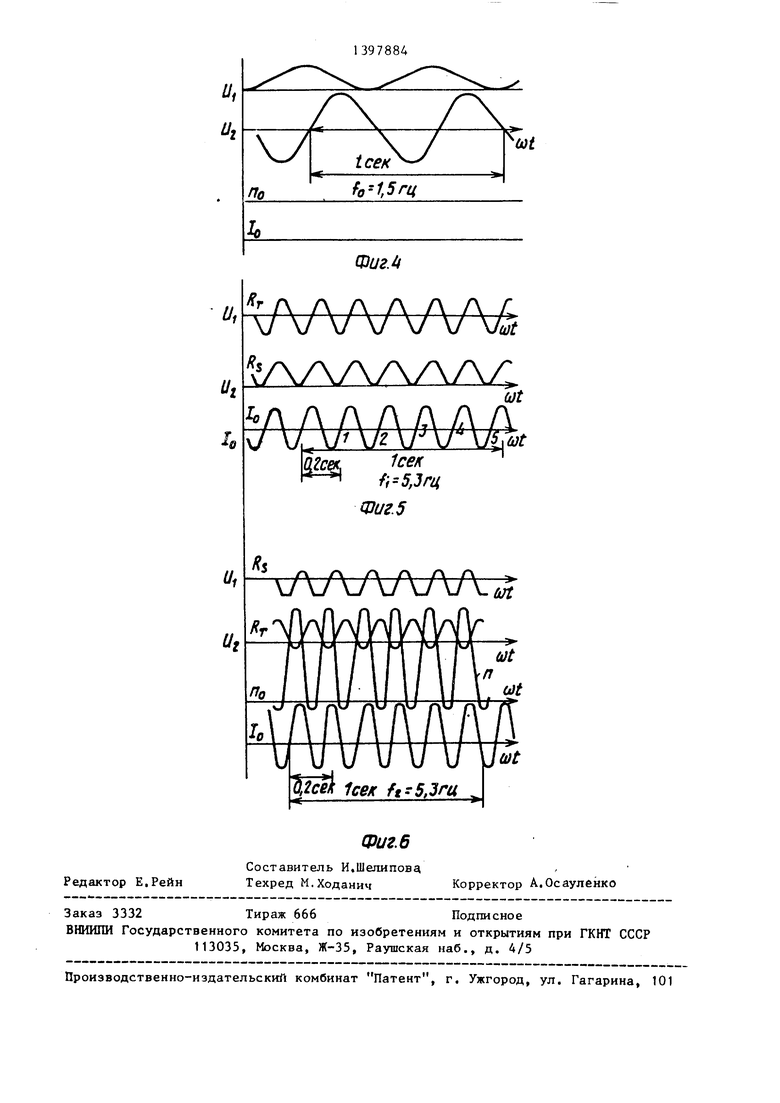
На фиг. 4, 5, 6-временные диаграмма работы устройства, реализующего способ.
Н а фи г. 1, 2, 3 при ня ты ел едующи е обозначения: операционный усилитель 1,
работающий в интегрирующем режиме, операционный усилитель 2, работающий в интегрирующем режиме, инвертирукг- щий усилитель - 3 с коэффициентом передачи 1, переменный резистор 4, задание амплитуды колебаний, источник 5 постоянного напряжения, резистор 6, регулирующий частоту колебаний, ограничитель 7 дпя ограничения амплитуды
OQ
;о
00 00
колебаний, измеряемый электропривод 8, якорь 9 электродвигателя, обмотка 10 возбуждения, регулируем 1й источник 11 напряжения, датчик 12 тока, выключaтeJlЬ 13 обмотки возбуждения, изодромное компенсирующее звено 14 с постоянной времени-Т,, конденсатор 15; с емкостью С2, регулируемой резйстс р 16 сопротивлением R, входной резис- тор 17 сопротивления Rj, корректирующее звено 18 ( Т -образный фильтр с постоянной времени Т) ключ 19.
Резисторы 20 сопротивлением R| и Rj, переменный конденсатор 21 емкое- тью С., изменяющий постоянную времени ТФ2 фильтра 18.
Конденсатор 22 емкостью С,,, вклнгт ченный в цепь обратной связи усилителя,, входной резистор 23 операционного усилителя 1.
Способ предусматривает измерение параметров в три этапа, Этап 1. Измеряется частота коле- |баний консервативного звена д(фиг.1. Для этого в соответствии с фигурой 1(а) собирается консервативное звено, состоящее из двух последовательно соединенных операционных усилителей 1 и 2 и отрицательной обратной связи, ocy ществляется инвертирующим усилителем 3.
Задание амплитуды колебаний осуществляется переменным резистором 4 от источника постоянного напряжения 5
Частота колебаний задается резистором 6„
Амплитуда колебаний задается так, чтобы колебание напряжений на выходе усилителя 1 не выходили на ограниче- ние ограничителя 7,
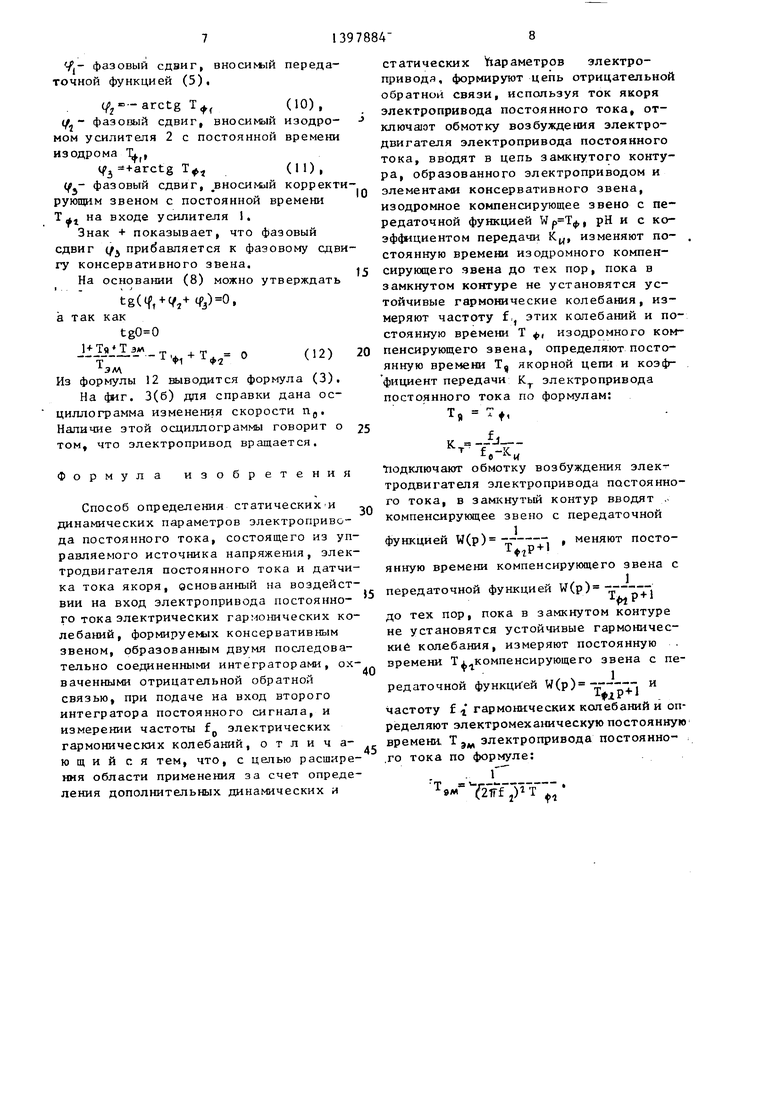
На фиг. 4 показаны осциллограмма изменения напряжения на выходе усилителей 1-и и 2-U,
Частота колебаний f определяется по осциллограмме. То, что амплитуда колебаний не ограничена, видно из ос- циллoгpaм ы U,
Этап 2. Измеряется К. Для этого в соответствии с фигурой 2(а)
вводят в контур консервативного звена лектропривод 8.
Выключателем 13 отключают обмотку возбуждения 10. При этом колебания на выходе усилителя 1 будут возрастать до ограничения, так как суммарный фа зовый сдвиг становится бол12ше 1 ВО .
С ц елью компенсации фазового сдвига, вносимого измepяe ым электропри
водом, вводят в контур компенсирующе звено 14, передаточная функция которого
W(p)-T,p-bl,
являющееся изодромом.
Для образования звена 14 последовательно с конденсатором 15 емкостью С вводят переменный резистор 16,
Изменяя время изодрома резистором 16, добиваются восстановления устойчивых неограниченных колебаний осцил лограммл напряжений U, U и Т (фиг. 2).
По осцилограммам определяется частота f .
По полученной постоянной времени изодрома
,, R4- 7 .
судят о постоянной времени якорной цепи
Коэффициент п- редачи по току определяется из соотношения:
1
R4
f 1
f л К,
(1),
где - коэффициент передачи
изодромного усилителя.
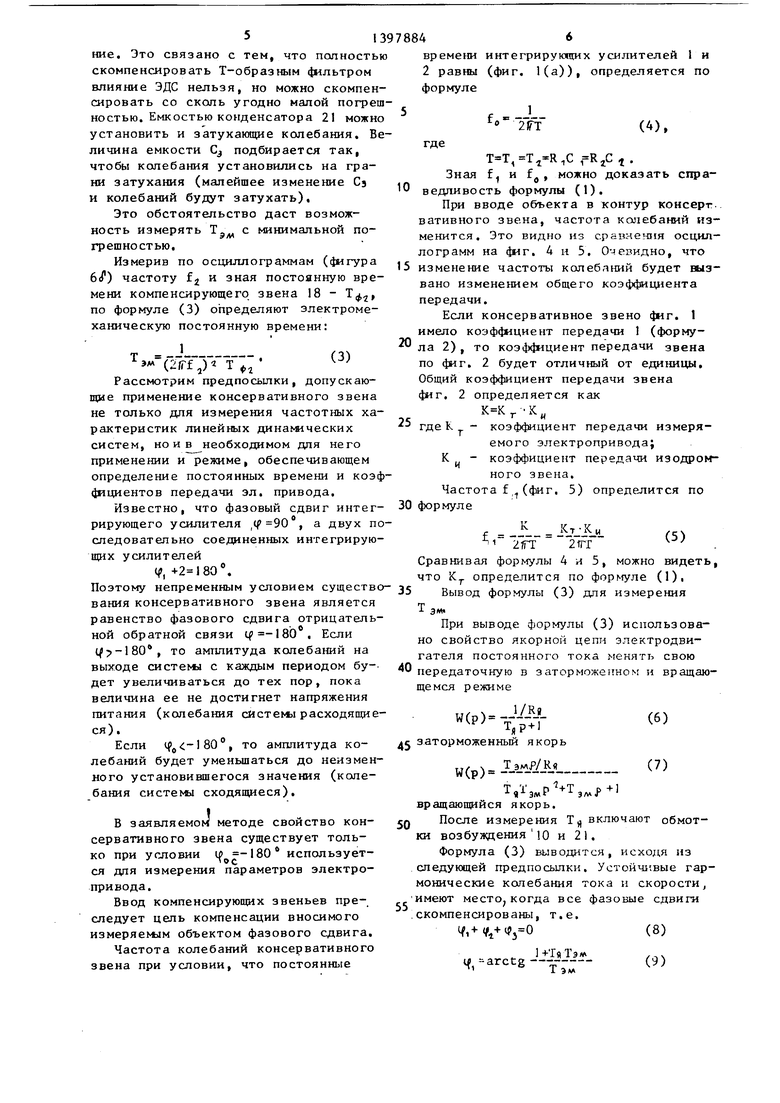
Этап 3. Измерение электромеханической постоянной времени Т. Для этого, не меняя параметров компенсирующего звена 14, включают выключателем 13 обмотку возбуждения 10 (фиг.З). Электропривод iначнет вращаться. При этом колебания напряжения на выходе усилителя 1-U, будут ограничены.
Для компенсации влияния вращающего электродвигателя на суммарный фазовый сдвиг (компенсации влияния ЭДС) ключом 19 включают звено 18 (фиг.З).
Передаточная функция второго компенсирующего звена имеет вид
, )
где постоянная времени
д
50
55
Т AI.AL.C
4i R,,+R; S
Компенсирующее звено определяет собой Т-образный фильтр, состоящий из резисторов 20 и конденсатора 21с переменной емкостью. Изменяя постоянную времени фильтра, добиваются устойчивых неограниченных колебаний ((1иг. 6).
Как видно из осциллограммя, форма изменения напряжения U, на выходе усилителя 1 имеет небольшое ограниче
(3)
ние. Это связано с тем, что полность скомпенсировать Т-образным 4ильтром влияние ЭДС нельзя, но можно скомпенсировать со сколь угодно малой погреностью. Емкостью конденсатора 21 можн установить и затухающие колебания. Вличина емкости Cj подбирается так, чтобы колебания установились на грани затухания (малейшее изменение Сэ и колебаний будут затухать).
Это обстоятельство даст возможность измерять Tj с минимальной погрешностью.
Измерив по осциллограммам (фигура 6(Г) частоту f и зная постоянную времени компенсирующего звена 18 - Т, по формуле (3) определяют электромеханическую постоянную времени:
т, J
м (2/Г,) Т ,
Рассмотрим предпосылки, допускающие применение консервативного звена не только для измерения частотных характеристик линейных динаьмческих систем, но и в необходимом для него применении и режиме, обеспечивающем определение постоянных времени и коэ (1яциентов передачи эл. привода.
Известно, что фазовый сдвиг интег рирующего усилителя ,(f 90, а двух пследовательно соединенных интегрирующих усилителей
(f, .
Поэтому непременным условием существ вания консервативного звена является равенство фазового сдвига отрицательной обратной связи . Если , то амплитуда колебаний на выходе системл с каждым периодом будет увеличиваться до тех пор, пока
величина ее не достигнет напряжения питания (колебания системз расходящиеся).
Если Ц) -180 , то амплитуда ко- 45 заторможенный якорь
«(p)-J времени интегрирующих усилителей I и 2 равны (фиг. 1(а)), определяется по формуле
2ГГ
(А),
где
10
Зная
20
30 формуле
,,C .
f и f, можно доказать справедливость формулы (1).
При вводе объекта в контур консерт. вативного звена, частота колебаний изменится. Это видно из сравнения осциллограмм на (1иг. Аи 5. Очевидно, что 15 изменение частоты колебаний будет вызвано изменением общего коэф |ициента передачи.
Если консервативное звено фиг. 1 имело коэффициент передачи 1 (формула 2) , то коэффициент передачи звена по фиг. 2 будет отличный от единицы. Общий коэффициент передачи звена фиг. 2 определяется как К,
25
г и
где К - коэфс ициент передачи измеряемого электропривода; К - коэффициент передачи изодромного звена. Частота f, (фиг. 5) определится по
формуле
f
2ГГ
2ГГ Сравнивая формулы 4 и 5,
(5) можно видет
что К определится по формуле (1), Вывод формулы (3) для измерения Т 3Mt
При выводе формулы (3) использовано свойство якорной цепи электродвигателя постоянного тока менять свою передаточную в затор ноже HHON; и вращающемся режиме
«(p)(6)
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕНЕРАТОР | 2011 |
|
RU2453983C1 |
| Способ управления электроприводом постоянного тока | 1982 |
|
SU1150721A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| ГЕНЕРАТОР | 2012 |
|
RU2504892C1 |
| Электропривод | 1986 |
|
SU1365336A1 |
| Способ и устройство выборки люфта в кинематической передаче опорно-поворотного устройства с двумя взаимосвязанными электроприводами | 2019 |
|
RU2726951C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ И РЕГУЛИРОВАНИЯ АВТОРЕЗОНАНСНЫХ КОЛЕБАНИЙ В ЭЛЕКТРОПРИВОДЕ ВОЗВРАТНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2410826C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОМАШИННЫЙ ИСТОЧНИК ЭЛЕКТРОПИТАНИЯ | 2012 |
|
RU2484576C1 |
| ПАЗОННЫЙ СПОСОБ МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2137286C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОКОЛЕБАТЕЛЬНЫХ РУЛЕВЫХ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145052C1 |
Изобретение относится к области регулируемого электропривода, а также может быть использовано и дпя измерения параметров динамических звеньев в системах автоматического регулирования. Цель изобретения - расширение области применения за счет определения дополнительных динамических и статических параметров электропривода. Поставленная цель достигается включением в цепь замкнутого контура, образованного двумя последовательно соединенными интеграторами, исследуемого динамического звена и компено1рующего звена и изменением параметров компенсирующего звена до тех пор, пока в замкнутом контуре не установятся устойчивые гармонические колебания, после чего по параметрам компенсирующего звена определяют параметры исследуемого звена. 6 ил.
лебаний будет уменьшаться до неизменного установившегося значения (колебания систеьы сходящиеся).
J
В заявляемого методе свойство консервативного звена существует только при условии используется для измерения параметров электропривода.
Ввод компенсирующих звеньев преследует цель компенсации вносимого измеряекым объектом фазового сдвига.
Частота колебаний консервативного звена при условии, что постоянные
и(р)1.
(7)
+Т
эм f
+
Т включают обмотТ/1 эмР вращающийся якорь.
Q После измерения
ки возбуждения 10 и 21.
Формула (3) выводится, исходя из следующей предпосылки. Устойчивые гармонические колебания тока и скорости имеют MecTOj когда все фазовые сдвиги ; скомпенсированы, т.е.
.+vv
f,
1+Т«Тэ« 4rarctg---(8) (9)
V j- фазовый сдвиг, вносимэ1й передаточной функцией (5),
(/ -arctg (10),
фазовый сдвиг, вносимый иэодро- MOM усилителя 2 с постоянной времени изодрома 1,
t 3-+arctg Т,(И),
(j- фазовый сдвиг, уносимый корректрующим звеном с постоянной времени Т j на входе усилителя 1.
Знак + показывает, что фазовый сдвиг с/з прибавляется к фазовому сдвгу консервативного звена.
На основании (В) можно утверждать
tg((f, + (f3)0, а так как
)и
.. + т. О
т- Ф2
(12)
Из формулы 12 выводится формула (3), На г. 3(6) для справки дана осциллограмма изменения скорости п. Наличие зтой осциллограммы говорит о том, что электропривод вращается.
Формула изобретения
Способ определения статических И динамических параметров электропривода постоянного тока, состоящего из управляемого источника напряжения, электродвигателя постоянного тока и датчика тока якоря, основанный на воздействии на вход электропривода постоянно- го тока электрических гармонических колебаний, формируем11х консервативным звеном, образованным двумя последовательно соединенными интеграторами, охваченными отрицательной обратной связью, при подаче на вход второго интегратора постоянного сигнала, и измерении частоты f электрических
гармонических колебаний, о т л и ч а
ю щ и и с я тем, что, с целью расширения области применения за счет определения дополнительных динамических и
J
0
0
5
0
4э
40
статических У1араметров электропривода, формируют цепь отрицательной обратной связи, используя ток якоря электропривода постоянного тока, отключают обмотку возбуждения электродвигателя электропривода постоянного тока, вводят в цепь замкнутого контура, образованного электроприводом и элементами консервативного звена, изодромное компенсирующее звено с передаточной функцией , рН и с коэффициентом передачи К, изменяют постоянную времени изодромного компенсирующего звена до тех пор, пока в замкнутом контуре не установятся устойчивые гармонические колебания, измеряют частоту f,, этих колебаний и постоянную времени Т ф, изодромного компенсирующего звена, определяют постоянную времени Т, якорной цепи и коэф- фициент передачи К электропривода постоянного тока по формулам: Т, Т,
-4-;
Подключают обмотку возбуждения элек тродвигателя электропривода постоянного тока, в замкнутый контур вводят .- компенсирующее звено с передаточной
функцией W(p)-i; . , меняют постоТф Р + 1
янную времени компенсирующего звена с
передаточной функцией W(p) --.
+ 1
до тех пор, пока в замкнутом контуре не установятся устойчивые гармонические колебания, измеряют постоянную . времени Т А компенсирующего звена с передаточной функци ей W(p)-;;; -. и
Ttip- 1 .
частоту f гармонических колебаний и определяют электромеханическую постоянную времени, Т j электропривода постоянно- .го тока по формуле:
. Г eM Y2Tf7)
RS
ьд
Фиг.1
П
Фиг.1
Ф//гЗ
щ
и.
По
KT
x/VVVVV Vwvx/vv:
(tjt
0
I2ce
U,
Rt
vAAAAAA1сек ft-5,3rи
0)t
fо -1,5 ГЦ
ФигМ
(tjt
1сек ,3ru
Фиг. 5
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
