Изобретение относится к области электромеханики и может быть использовано для управления взаимосвязанными электромеханическими приводами, которые имеют люфтосодержащую кинематическую связь с общим выходным колесом, жестко связанным с объектом управления, применяемыми в опорно-поворотных устройствах, металлообрабатывающих станках, и других силовых системах управления движением, требующих высокого быстродействия и точности регулирования координат.
Известен способ управления взаимосвязанными электроприводами с упругими звеньями и зазорами в кинематических передачах по принципу электромеханического распора (Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. Л.: Энергоиздат, Ленинградское отделение, 1982, с. 226-230), согласно которому токи электроприводов формируют силовыми преобразователями, индивидуальными для каждого электропривода, моменты распора и движущие моменты электроприводов формируют контурами регулирования моментов, индивидуальными для каждого электропривода, а регулирование целевой координаты объекта управления осуществляют контуром, общим для всех электроприводов.
Недостатком данного технического решения является использование силовых устройств управления, в котором регулирование моментов распора производится за счет введения дополнительного напряжения смещения в управляемые каналы, и низкий КПД т.к. постоянное напряжение смещения для выборки люфта нагружает дополнительным моментом движущий
электропривод, это приводит к тому, что момент отдельного двигателя выше момента нагрузки на величину момента выборки люфта.
Наиболее близким по технической сущности, принятый за прототип, является способ управления взаимосвязанными электроприводами (патент RU на изобретение №2655723, опубл. 30.05.2018, МПК Н02Р 5/46), согласно которому формирование токов каждого электропривода осуществляют контурами регулирования токов, индивидуальными для каждого электропривода, при этом динамику регулирования токов корректируют последовательными регуляторами, затем формирование моментов распора и движущих моментов электроприводов осуществляют внешними и внутренними контурами регулирования моментов, индивидуальными для каждого электропривода, при этом динамику регулирования моментов распора и движущих моментов каждого электропривода корректируют параллельными регуляторами внутренних контуров в зависимости от координат электрических двигателей и кинематических передач, затем динамику формирования моментов распора и движущих моментов каждого электропривода корректируют последовательными регуляторами внешних контуров, далее динамику и точность регулирования целевой координаты корректируют последовательным регулятором и параллельным регулятором контура регулирования целевой координаты в зависимости от координат объекта управления.
Достоинством данного способа управления являются высокое быстродействие и точность регулирования координат взаимосвязанных электромеханических приводов.
Недостатком данного способа является отсутствие возможности суммирования моментов отдельных электроприводов после выбора люфта, кроме того, управление моментами распора осуществляется контуром силового регулирования, что приводит к значительным потерям энергии т.к. постоянное напряжение смещения для выборки люфта нагружает дополнительным моментом движущий электропривод, и, как следствизавышению потребной мощности исполнительных двигателей на величину момента выборки люфта, увеличению его стоимости.
Наиболее близким по технической сущности, принятый за прототип, является устройство управления взаимосвязанными электроприводами (патент RU на изобретение №2655723, опубл. 30.05.2018, МПК Н02Р 5/46), согласно которому электропривод состоит из задатчика положения, который формирует команды управления, регулятора положения, по сигналам управления и сигналам датчика положения объекта управления формирует сигнал ошибки по положению, далее, через диодные элементы, используемые в качестве фильтров по направлению, сигнал поступает на один из входов блока суммирования того электропривода, который в данный момент должен быть движущим. Блок суммирования установлен в каждом канале электропривода и имеет два входа, на первый подается сигнал ошибки по положению, прошедший через соответствующий диодный фильтр направления, на второй вход поступает сигнал выбора люфта от задатчика момента, который создает необходимый распор при нулевом сигнале регулятора положения. Выход блока суммирования подключен к последовательным усилителям и регуляторам скорости и момента, которые внутренними контурами обеспечивают работу электродвигателя. Электродвигатель соединен люфтосодержащей механической передачей с общим колесом, жестко соединенным с объектом управления.
Достоинством данного устройства является автономность внутренних контуров регулирования отдельных электроприводов, а также возможность выборки люфта при переходе порога срабатывания.
Недостатками данного устройства является то, что выборка люфта осуществляется силовыми контурами, что приводит к потере энергии, а также завышению на величину выборки люфта мощности исполнительных двигателей, каждый из двигателей создает момент только в одном направлении, и два двигателя не могут создавать суммарный момент в одном направлении.
Целью данного способа и устройства является устранение недостатков известных способов управления взаимосвязанными электромеханическими приводами, которые имеют люфтосодержащие механические передачи с общим выходным колесом, обеспечению действия моментов встречно, создавая распор, при малом сигнале ошибки, и суммирование моментов в одном направлении при сигнале ошибки превышающим значение люфта, за счет применения электронного слаботочного люфтовыбирающего устройства.
Технический результат применения предлагаемого способа и устройства заключается в достижении высокодинамичных характеристик приводов с двумя электродвигателями путем исключения влияния люфта в люфтосодержащих механических передачах маломощными слаботочными электронными средствами, повышение КПД за счет исключения момента сопротивления, создаваемого двигателем выбирающим люфт, и увеличение развиваемого момента за счет суммирования моментов двух электродвигателей при длительном движении объекта управления в одном направлении.
Технический результат достигается тем, что в предлагаемом способе управления взаимосвязанными электромеханическими приводами с выбором люфта по принципу электромеханического распора, выделяется сигнал ошибки рассогласования между задающим и действительным положением выходного звена электромеханического привода с объектом управления, преобразуется для управления электромеханическим приводом, далее в каждом канале электромеханического привода происходит формирование токов, учитывающих индивидуальные особенности электродвигателей и кинематических цепей каналов, тем самым формируя развиваемые моменты, обеспечивающие распор и движение объекта управления, преобразование сигнала ошибки осуществляется путем его разветвления, два из которых отфильтровываются, один от положительной составляющей, а другой от отрицательной, оба отфильтрованных сигнала умножаются на сигнал ошибкии смещаются сигналами с перекрестных связей, каждый из которых содержит звенья запаздывания с постоянной времени, зависящей от индивидуальных особенностей электродвигателя и кинематической цепи канала, создаваемый сдвиг сигналов ошибки по фазе обеспечивает разницу амплитуд, соответствующую величине люфта, и эти сигналы формируют токи и развиваемые моменты в канале электромеханического привода так, что при малом сигнале ошибки моменты в каналах создают распор, а при большой величине сигнала суммируются и создают момент в одном направлении.
Предложенный способ и устройство позволяют упростить управление взаимосвязанными электродвигателями, работающими на общую нагрузку, за счет использования электронных средств формирования сигналов управления, и соответствующих им токов и моментов.
Сущность предлагаемого способа регулирования поясняется чертежами, где на фиг. 1 приведена функциональная схема устройства электропривода.
На фиг. 2 приведена схема электронного устройства выборки люфта.
На фиг. 3 приведены осциллограммы отработки электроприводом с люфтом в механических передачах гармонического сигнала управления соизмеримого с величиной люфта, с использованием предложенного электронного устройства выборки люфта.
На фиг. 3а приведены осциллограммы сигнала управления ϕу и отработки приводом управляющего сигнала ϕвых.
На фиг. 3б приведена осциллограмма сигнала динамической ошибки системы θ на выходе звена 8.
На фиг. 3в приведена осциллограмма сигнала на выходе звена 9.
На фиг. 3г приведена осциллограмма сигнала на выходе звена 10.
На фиг. 3д приведена осциллограмма сигнала на выходе звена 16.
На фиг. 3е приведена осциллограмма сигнала на выходе звена 17.
На фиг. 3ж приведена осциллограмма сигнала на выходе звена 15.На фиг. 3з приведены осциллограммы сигналов на выходе звеньев 13 и 14.
На фиг. 3и приведены осциллограммы сигналов θ1, θ2 на выходах звеньев 11 и 12.
На фиг. 3к приведены осциллограммы моментов, развиваемых отдельными электроприводами, а также суммарного момента, прикладываемого к объекту управления.
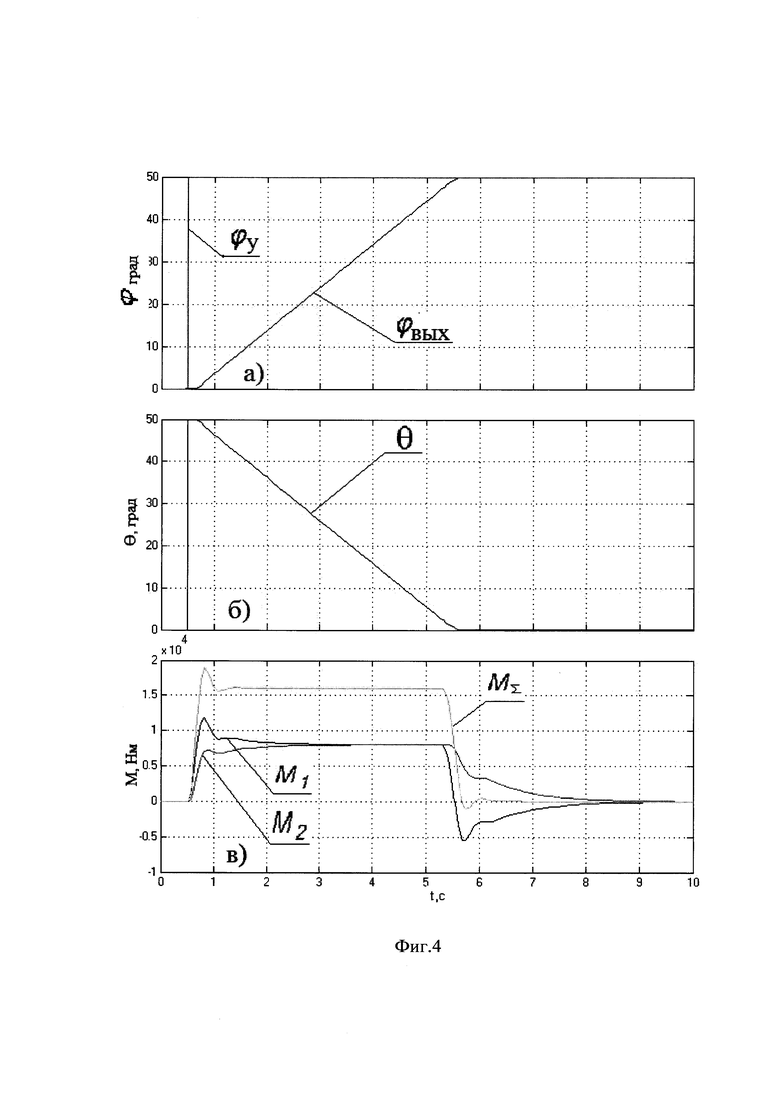
На фиг. 4 приведены осциллограммы отработки приводом с люфтом в механических передачах ступенчатого сигнала управления в режиме переброса, который существенно превышает величину люфта.
На фиг. 4а приведены осциллограммы сигнала управления ϕу и отработки приводом управляющего сигнала ϕвых.
На фиг. 4б приведена осциллограмма сигнала динамической ошибки системы θ.
На фиг. 4в приведены осциллограммы моментов, развиваемых отдельными электроприводами, а также суммарного момента, прикладываемого к объекту управления.
Устройство электропривода (фиг. 1) состоит из последовательно расположенных: устройства формирования сигнала управления 1, согласующего усилителя-сумматора 2, электронного устройства выборки люфта 3, двух контуров управления 4, 5, состоящих из усилителя мощности, электродвигателя, редуктора, моменты которых суммируются на общем колесе, жестко соединенным с объектом управления 6 и датчика обратной связи 7.
Устройство формирования сигнала управления 1, вырабатывающее сигнал управления ϕу, подключено к первому входу согласующего усилителя-сумматора 2, а второй его вход соединен с датчиком обратной связи 7. Выход усилителя-сумматора 2 соединен со входом устройства выборки люфта 3. Устройство выборки люфта 3 имеет два выхода, обозначенных сигналами θ1, θ2. Эти выходы подключены к каналам управления 4, 5, содержащим усилители мощности, формирующим токи и напряжения управления двигателями, которые создают управляющие моменты, каждый из которых, через механические люфтосодержащие передачи, соединен с общим выходным колесом, жестко соединенным с объектом управления 6.
Устройство выборки люфта 3 состоит из двух фильтров 9, 10, двух блоков суммирования 11, 12, двух апериодических звеньев 13, 14 с постоянными времени T1, Т2, блока выделения модуля сигнала 15 и четырех блоков умножения 16-19. Вход устройства выборки люфта 3 разветвлен разветвителем 8 на шесть выходов. Два выхода разветвителя сигнала ошибки подключены ко входам фильтров 9, 10. Фильтры 9, 10 имеют по два выхода, которые образуют две ветви, одна через первый блок умножения 16 подключена к первому входу сумматора 11, а вторая через апериодическое звено 14 и второй блок умножения 19 образует перекрестную связь, подключенную ко второму входу на второй сумматор 12. В одну из ветвей после фильтра 10 включен блок выделения модуля сигнала 15, необходимый для согласования знаков сигналов на выходах звеньев 17 и 18, вторые входы четырех блоков умножения подключены к оставшимся выходам разветвителя входного сигнала. Сигналы с выходов блоков суммирования 11, 12 являются выходными сигналами устройства выборки люфта θ1, θ2. Постоянные времени динамического запаздывания Т1, T2 апериодических звеньев выбираются из условия обеспечения фазового сдвига сигнала β так, чтобы разница амплитуд сигналов α была выше значения люфта с учетом запаздывания сигналов контуров (фиг. 3и).
Способ и устройство для управления взаимосвязанными электромеханическими приводами обеспечивающее выбор люфта, по принципу электромеханического распора, работают следующим образом: устройство формирования сигнала управления 1 выдает сигнал положения объекта управления ϕу на согласующий усилитель-сумматор 2, который сравнивает значение задающего сигнала с сигналом текущего положения, поступающим от датчика обратной связи 7, и, по разнице сигналов, формирует сигнал динамической ошибки θ, поступающий на вход устройства выборки люфта 3. Устройство выборки люфта преобразует получаемый сигнал в сигналы управления каналами привода θ1, θ2, на осциллограмме (фиг. 3и) хорошо видны смещения сигналов по амплитуде α в зависимости от смещения фаз β.
Последовательность преобразования сигнала устройством выборки люфта (фиг. 2) поясняется осциллограммами сигналов на выходах отдельных звеньев данного устройства, которая показана на фиг. 3б-3и. Сигнал динамической ошибки θ (фиг. 3б) через разветвитель 8 люфтовыбирающего устройства поступает на входы фильтров 9, 10, которые пропускают сигналы положительной (фиг. 3в), либо отрицательной (фиг. 3г) амплитуды. Каждый из фильтров имеет по два выхода, сигналы с первого выхода фильтров усиливаются блоками умножения 16 и 17 (фиг. 3д, 3е). Два других сигнала с разветвителя 8 поступают на апериодические звенья 13, 14 с постоянной времени Т1, Т2 (фиг. 3з), усиливаются блоками умножения 18, 19 и добавляются в сумматоры 11, 12 каналов управления (фиг. 3и). При изменении знака управляющего сигнала происходит переключение фильтров и изменение сигналов на выходах сумматоров 11 и 12. Каналы привода 4, 5 по получаемым сигналам θ1, θ2 формируют управляющие напряжения и токи двигателей, моменты которых обеспечивают движение объекта управления 6 с заданными скоростями и ускорениями.
Динамику и точность регулирования координат, взаимосвязанных электроприводов, иллюстрируют осциллограммы отработки электроприводом с люфтом в механических передачах гармонического сигнала управления (фиг. 3). При амплитуде гармонического сигнала управления соизмеримом с зоной люфта, момент распора действует во всех режимах работы привода, обеспечивая выбор люфта (фиг. 3к).
Отработка приводом сигнала управления ϕу, превышающем зону люфта, в режиме переброса показана на фиг. 4. На фиг. 4в хорошо видно, что в режиме движения с постоянной скоростью моменты двух приводов имеют одинаковый знак и суммируются, обеспечивая требуемые скорости и ускорения объекта управления, при этом, в момент разгона и торможения наблюдается расхождение сигналов моментов, обусловленное динамическими характеристиками каналов.
Таким образом, высокодинамичные характеристики и повышенный КПД приводной системы опорно-поворотного устройства состоящего из нескольких взаимосвязанных электромеханических приводов, имеющих люфт в механических передачах, достигается за счет введения электронного устройства выборки люфта, которое создает моменты, действующие встречно (в распор), обеспечивая выборку люфта при амплитуде сигнала динамической ошибки соизмеримой с величиной люфта, и создают суммирование моментов отдельных приводов на общем колесе при движении в одном направлении, что особенно важно в крупногабаритных опорно-поворотных устройствах, требующих больших моментов электродвигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Устройство для управления приводом робота | 1987 |
|
SU1579770A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЗАИМОСВЯЗАННЫМИ ЭЛЕКТРОПРИВОДАМИ (ВАРИАНТЫ) | 2006 |
|
RU2316886C1 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2366069C1 |
| Электромеханический следящий привод постоянного тока | 1989 |
|
SU1640668A1 |
| Устройство для управления двухдвигательным электроприводом | 1989 |
|
SU1644350A1 |



Изобретения относятся к области электромеханики. Технический результат - достижение требуемых динамических характеристик, повышение КПД. Способ управления взаимосвязанными электромеханическими приводами с выборкой люфта по принципу электромеханического распора заключается в выделении сигнала ошибки рассогласования между задающим и действительным положением выходного звена привода с объектом управления, преобразовании сигнала ошибки путем его разветвления, два из которых отфильтровываются, оба отфильтрованных сигнала умножаются на сигнал ошибки и смещаются сигналами перекрестных связей, каждая из которых содержит звенья запаздывания с постоянной времени, зависящей от индивидуальных особенностей электродвигателя и кинематической цепи канала, создаваемый сдвиг сигналов ошибки по фазе обеспечивает разницу амплитуд, соответствующую величине люфта, и эти сигналы формируют токи и развиваемые моменты в канале привода так, что при сигнале ошибки, соизмеримом с зоной люфта, создают распор, а при величине сигнала, превышающей зону люфта, суммируют и создают момент в одном направлении. 2 н.п. ф-лы, 4 ил.
1. Способ управления взаимосвязанными электромеханическими приводами с выборкой люфта по принципу электромеханического распора, заключающийся в выделении сигнала ошибки рассогласования между задающим и действительным положением выходного звена электромеханического привода с объектом управления, преобразовании сигнала ошибки для управления электромеханическим приводом, формировании в каждом канале электромеханического привода токов, учитывающих индивидуальные особенности электродвигателей и кинематических цепей каналов, и формировании развиваемых моментов, обеспечивающих распор и движение объекта управления, отличающийся тем, что преобразование сигнала ошибки осуществляют путем его разветвления, два из которых отфильтровывают, один от положительной составляющей, а другой от отрицательной, оба отфильтрованных сигнала умножают на сигнал ошибки и смещают сигналами перекрестных связей, каждая из которых содержит звенья запаздывания с постоянной времени, зависящей от индивидуальных особенностей электродвигателя и кинематической цепи канала, создаваемый сдвиг сигналов ошибки по фазе обеспечивает разницу амплитуд, соответствующую величине люфта, и эти сигналы формируют токи и развиваемые моменты в канале электромеханического привода так, что при сигнале ошибки, соизмеримом с зоной люфта, создают распор, а при величине сигнала, превышающей зону люфта, суммируют и создают момент в одном направлении.
2. Устройство управления взаимосвязанными электромеханическими приводами с выборкой люфта по принципу электромеханического распора, состоящее из согласующего усилителя-сумматора с двумя входами, один вход соединен с задающим блоком, а второй - с датчиком обратной связи, а выход соединен с усилителями мощности двух каналов управления, включающих последовательно соединенные с усилителями электродвигатели, промежуточную или промежуточные механические передачи, которые имеют люфтосодержащую кинематическую связь с общим выходным колесом, жестко связанным с объектом управления, отличающееся тем, что между согласующим усилителем и усилителем мощности введено электронное люфтовыбирающее устройство, содержащее разветвитель сигнала ошибки на шесть выходов, два фильтра, отфильтровывающие положительный или отрицательный полярный сигнал ошибки, четыре блока умножения, два блока суммирования, один блок выделения модуля сигнала и два апериодических звена с постоянными времени Τ1 и Т2, соединенные следующим образом: два выхода с разветвителя сигнала ошибки подключены к фильтрам соответственно, два выхода каждого фильтра образуют две ветви, одна через первый блок умножения, выход которого соединен со входом первого сумматора, а вторая ветвь через апериодическое звено и второй блок умножения образуют перекрестную связь, подключенную ко входу второго сумматора, в одну из ветвей от фильтра к апериодическому звену включен блок выделения модуля сигнала, вторые входы четырех блоков умножения подключены к оставшимся выходам разветвителя сигнала ошибки соответственно, выходы блоков суммирования соединены с входами усилителей мощности каналов, моменты электродвигателей которых направлены встречно, создавая распор, или суммируются в одном направлении.
| Способ регулирования координат взаимосвязанных электроприводов | 2017 |
|
RU2655723C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЗАИМОСВЯЗАННЫМИ ЭЛЕКТРОПРИВОДАМИ (ВАРИАНТЫ) | 2006 |
|
RU2316886C1 |
| Устройство для управления двухдвигательным электроприводом | 1988 |
|
SU1577054A1 |
| Устройство для управления двухдвигательным электроприводом | 1983 |
|
SU1138915A1 |
| US 5708332 A1, 13.01.1998 | |||
| DE 3935712 A1, 03.05.1990. | |||

