со со со
4
Изобретение относится к аналоговой вычислительной технике и может быть использовано для моделирования механизмов шагового перемещения, на- пример механизмов транспортирования металлических и других мест, в которых в качестве источника энергии используется вибрация.
Цель изобрете ния г повышение точ- ности моделирования механизмов шагового перемещения.
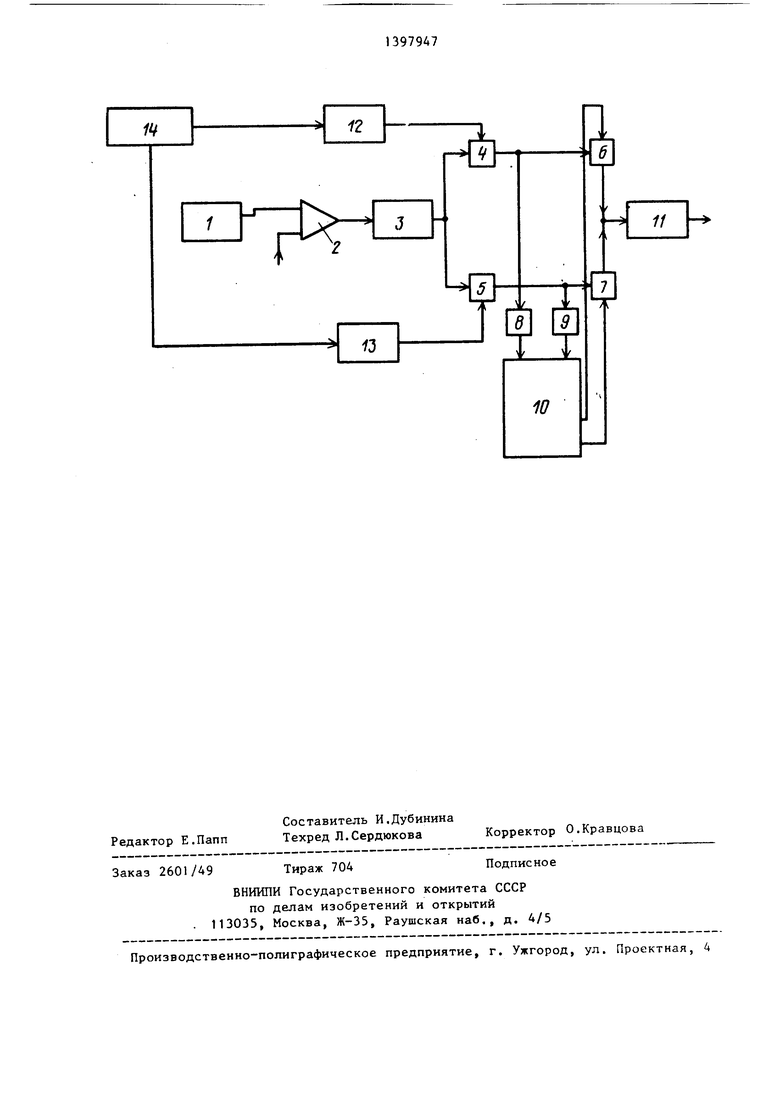
На чертеже показана структурная схема устройства.
Устройство содержит блок 1 зада- ния гармонических колебаний, суммирующий усилитель 2, двухполупериод- ный вьтрямитель 3, третий и четвертый ключи 4 и 5, первый и второй ключи 6 и 7 , фильтры 8 и 9 среднего зна чения, дифференциальный усилитель 10, интегратор 11, блоки 12 и 13 формирования запаздьшания включения, каждый из которых выполнен в виде апериодического звена, блок 14 задания пере мещения.
Устройство работает следующим образом .
Управляющий сигнал от блока 14, 1 ;оторый может быть выполнен в виде микроэвм, поочередно поступает через блоки 12 и 13, которые задают запаздывание включения, определяемое инерционностью фиксаторов моделируемого механизма, на управляющие входы клю- чей 4 и 5. Синусоидальный сигнал с блока 1 задания гармонических колебаний поступает на вход суммирующего усилителя 2, где суммируется с сигналом коррекции Установка О, опреде- ляющим начальное положение вибратора Далее сигнал с выхода суммирующего усилителя 2 поступает на вход вьтря- мителя 3, сигнал на выходе которого пропорционален действительному изме- нению силового фиксатора при качании вибратора. Сигнал с выхода выпрямителя 3 поступает на входы ключей 4 и 5 сигналы на выходах которых пропорциональны приращениям перемещений при открытии фиксаторов. Полученные приращения перемещений поступают на входы фильтров 8 и 9 среднего значения. Накопленные (средние) значения перемещений за время работы вычитаются между собой в дифференциальном усилителе 10 и в зависимости от знака раз- нос-ЕИ на его выходе проходит сигнал на управляющие входы ключей 6 и 7,
пропуская на вход интегратора 1I реальное значение приращения перемещения . Блок регистрации результата моделирования, вьтолненный в виде интегратора 11, накапливает поступающие на его вход приращения. Сигнал, пропорциональный перемещению рабочего органа, например ленты, снш ается с выхода интегратора 11.
Формула изобретения
Устройство для моделирования механизмов шагового перемещения, содержащее блок задания гармонических колебаний, два блока формирования запаздывания включения, каждый из которых вьтолнен в виде апериодического звена, четыре ключа и интегратор, выход которого является выходом устройства вход интегратора соединен с выходами первого и второго ключей, отличающееся тем, что, с целью повьш1ения точности моделирования, в него введены блок коррекции формы колебаний, состоящий из суммирующего усилителя и двухполупериодного выпрямителя, блок задания перемещения, анализатор приращений, состоящий из двух фильтров среднего значения и дифференциального усилителя, причем выход блока задания гарамонических колебаний соединен с первым входом суммирующего усилителя, второй вход которого соединен с входом Установка О устройства, выход суммирующего усилителя через двухполупериодный выпрямитель соединен с информационными входами третьего и четвертого ключей, выход третьего ключа подключен к информационному входу первого ключа и входу первого фильтра среднего значения, выход которого подключен к неинвертирующему входу дифференциального усилителя, прямой и инверсный выходы которого соединены соответственно с управля1й1цими входами первого и второго ключей, выход четвертого ключа подключен к информационному входу второго ключа и входу второго фильтра среднего значения, выход которого соединен с инвертирующим входом дифференциального усилителя , управляющие входы третьего и четвертого ключей подключены соответственно к выходам первого и второго апериодических звеньев, входы которых соединены с первым и вторым выходами блока задания перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования механизмов шагового перемещения | 1981 |
|
SU1015401A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2008 |
|
RU2383985C1 |
| Устройство для моделирования упруговязкой фрикционной пары | 1990 |
|
SU1780091A1 |
| Преобразователь однофазного напряжения в трехфазное | 1991 |
|
SU1786616A1 |
| Устройство для моделирования адаптивного нейроно-глиального комплекса | 1979 |
|
SU773649A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ИСТОЧНИК ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ С КОМПЕНСАЦИЕЙ ИСКАЖЕНИЙ В ПИТАЮЩЕЙ СЕТИ | 2005 |
|
RU2292627C1 |
| Устройство управления впрыском топлива в дизель-генератор | 1983 |
|
SU1116204A1 |
| Устройство для моделирования вентильного электродвигателя | 1985 |
|
SU1425732A1 |
| Устройство для управления вентильным преобразователем | 1985 |
|
SU1246285A1 |
Изобретение относится к аналого- йой вычислительной технцке и может быть использовано для моделирования механизмов шагового перемещения, на пример механизмов транспортирования металлических и других мест, в которых в качестве источника энергии используется вибрация. Цель изобретения - повышегие точности моделирования. Для достижения цели в устройство введены блок коррекции формы колебаний, состоящий из суммирующего усилителя и двухполупериодного выпрямителя, блок задания перемецения и анализатор приращений, состоящий из двух фильтров среднего значения и дифференциального усилителя. Ус-тройство позволяет за счет учета повторно-кратковременного характера изменения управляющих сигналов на входе моделировать динамические процессы в вибрационном механизме шагового перемещения с высокой точностью. I ил. i СЛ
| Устройство для моделирования привода | 1975 |
|
SU551666A1 |
| Устройство для моделирования механизмов шагового перемещения | 1981 |
|
SU1015401A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
