СП
00
;о
со
00 4
4 и тягой 5, фрикционно-заклиниваю- щее устройство, в состав которого входят ролики 13,пружины 17, возврат ные пружины 19, обойма с роликами 13, рабочая тяга прямого хода 14, рабочая тяга обратного хода 15. Переключающие пластины 20 подвижно установлены на обойме 9 и связаны с ней посредством пружин 21. Ручка 22 для ручного оперирования приводом неподвижно установлена на обойме 9. При подаче напряжения на электромагнит якорь 4 совместно с тягой 5 начнут движение. Рабочая тяга прямого хода 14 и двуплечий рычаг 7, поворачиваясь вокруг оси 8, будут воздействовать на рабочую тягу обратного хода 15, сообщая ей движение, противоположное движению якоря 4. При этом ролики 13 заклинятся между рабочей тягой прямого хода 14 и переместят обойму 9 на величину движения якоря 4. Рабочая тяга обратного хода 15 своОодно переместится между роликами 13, так как направление ее движения
противоположно Направлению заклинивания. При снятии импульса напряжения, под воздействием возвратных пружин 19, рабочая тяга прямого хода 14 вернется в исходное положение, а рабочая тяга обратного хода 15, если противодействующее усилие будет меньше усилия пружин 19, сообщит обойме 9 дополнительное перемещение в нужном направлении. Если противодействующее усилие будет больше усилия пружин 19, то возвращению обоймы 9 в исходное положение будет препятствовать заклинивание роликов 13 между рабочей тягой обратного хода 15. Процесс будет повторяться, пока обойма 9 не дойдет до определенного положения и электромагнит не обесточится конечным выключателем 26 или не произойдет скачкообразный переброс переключающих пластин 20 совместно с роликами 13 из одного крайнего положения в другое, при этом обойма 9 будет совершать возвратно-поступательные движения.1 з.п, ф-лы, 4 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритный электромеханический пульсирующий привод | 1985 |
|
SU1259348A1 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПУЛЬСИРУЮЩИЙ УДАРОВИБРОСТОЙКИЙ ПРИВОД | 1966 |
|
SU180229A1 |
| Устройство для переключения ремизоподъемной каретки ткацкого станка на обратный ход | 1986 |
|
SU1461781A1 |
| Механизм подачи сварочной проволоки | 1989 |
|
SU1764883A1 |
| ПРИВОД ВЫКЛЮЧАТЕЛЯ | 1970 |
|
SU273314A1 |
| СТОЯНОЧНАЯ ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2213672C2 |
| Круглая вязальная машина-полуавтомат | 1932 |
|
SU37236A1 |
| УСТРОЙСТВО ДЛЯ ПРОТИВОПОЖАРНОЙ ЗАЩИТЫ АВТОМОБИЛЯ | 2022 |
|
RU2790891C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЗАМОК | 1995 |
|
RU2098587C1 |
| Устройство для изготовления пружин | 1984 |
|
SU1222373A1 |
Изобретение относится к электротехнике и может быть использовано в качестве дистанционного привода электрических аппаратов. Цель изобретения - упрощение конструкции и уменьшение габаритов. Устройство содержит основание 1, электромагнит, состоящий из сердечника 2, втягивающей катушки 3 с прямоходовым якорем
1
Изобретение относится к электро- т-ехнике, низковольтным электрическим :1ппаратам, в частности к дистанцион- | ым приводам электрических аппаратов . может быть использовано в устройствах, требующих возвратно-поступательных перемещений.
Целью изобретения является упрощение конструкции и уменьшение габа- ритов.
На фиг.1 показан привод; на фиг.2 размещение рабочих тяг прямого и обратного ходов в обойме; на фиг.З - фрпкционно-заклинивающий механизм со снятыми переключающими пластинами ручкой для ручного управления и механизмом перемещения и автоматического выключателя; на фиг.4 - механизм переключения, связанный с ручкой ав - томатического выключателя.
Малогабаритный электромеханический пульсирующий привод содержит основание 1, на котором закреплены
все узлы и детали, электромагнит, состоящий из сердечника 2, втягивающей
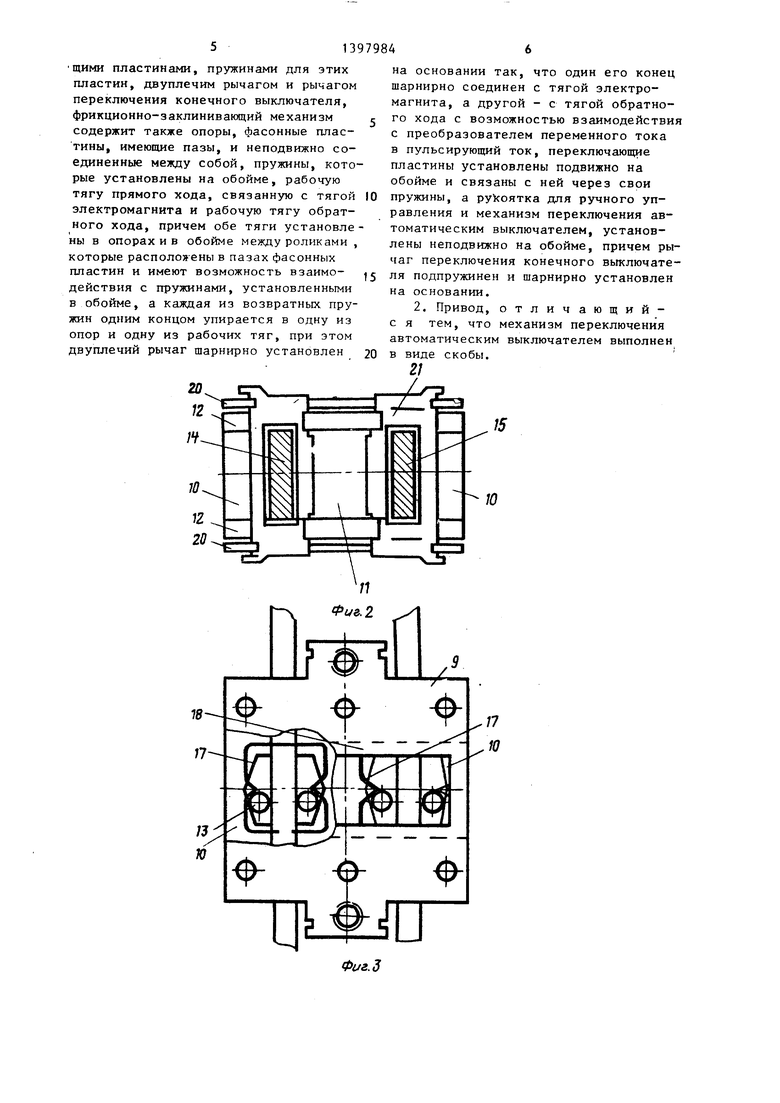
катушки 3, якоря 4, имеющего скосы, выполненные со стороны, противоположной стопа якоря 4 (стоп не показан для уменьшения тягового усилия в конце его хода, тяги 5 и якоря 4). Посредством двуплечей оси 6 рычаг 7 шарнирно связан с тягой 5. Рычаг 7 шарнирно установлен на основании посредством оси 8. Фрикционно-заклини- вающий механизм содержит обойму 9, состоящую из крайних фасонных пластин 10, средней фасонной пластины 11, неподвижно соединенных между собой пластинами 12, роликов 13, подвижно установленных в пазах фасонных пластин 10 и 11, рабочую тягу 14 прямого хода, входящую в зацепление с тягой 5, рабочую тягу 15 обратного хода, кинематически связанную с рычагом 7 обратного хода. Рабочая тяга 14 прямого хода и рабочая тяга 15 об- ратного хода подвижно установлены в направляющих опорах 16, неподвижно установленных на основании 1, и подвижно установлены в обойме 9 между
313
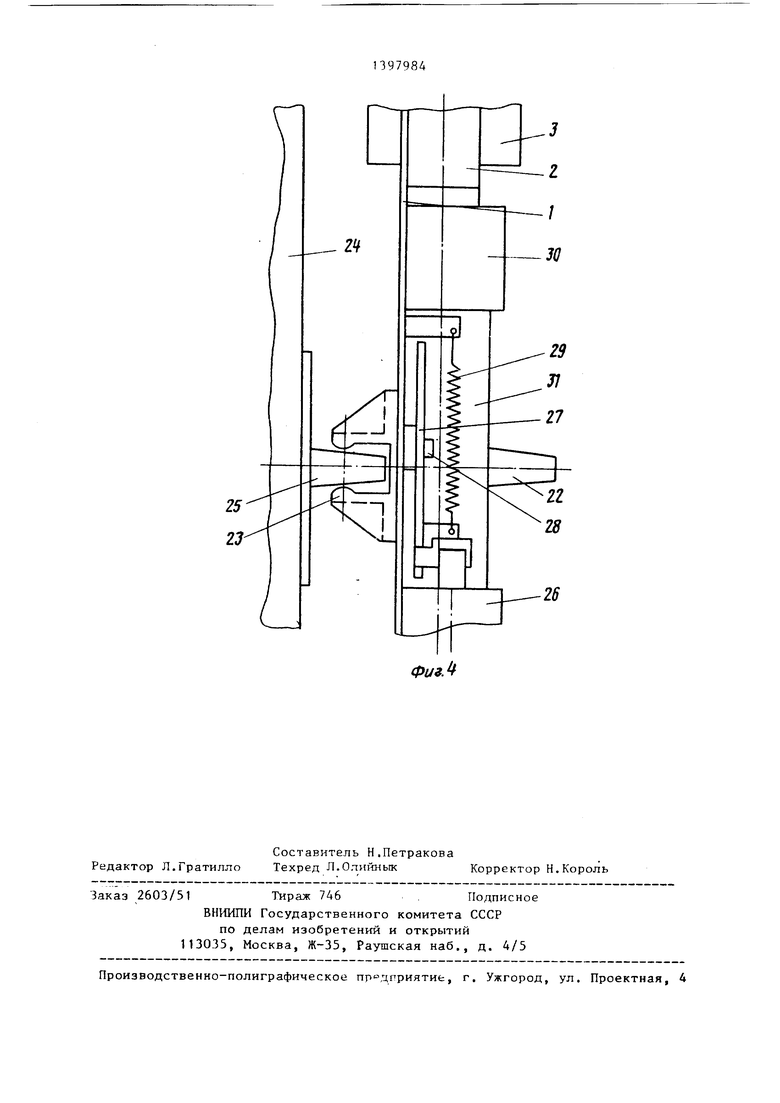
роликами 13. Пружины 17 заклиниваю-- щего механизма, вэаимодейств тощие с роликами 13, неподвижно установлены на обойме 9 в пазах 18, выполненных на пластинах 12. Одна из возвратных пружин 19 этого механизма одним своим концом упирается в рабоч то тягу 14 прямого хода, а вторая возвратная пружина 19 одним своим концом упира- ется в рабочую тягу 15 обратного хода, вторыми своими концами возвратные пружины 19 неподвижно закреплены относительно основания 1. Переключающие пластины 20 подвижно уста- новлены на обойме 9. Пружины 21 переключающих пластин 20 установлены так, что один конец каждой из них имеет опору на обойме 9, а вторые концы упираются в переключающие пластины 20. Ручка 22 для ручного управления приводом, неподвижно установлена на обойме 9. Механизм 23 переключения привода с автоматическим выключателем 24 неподвижно ус- тановлен на обойме 9 : воздейстну- ет на ручку 25 .автоматического РЫКЛЮ чателя 2А. Конечный выключатель 26 неподвижно установлен на основании 1, а рычаг 27 шарнирно установлен посредством оси 28 на основании 1 и кинематически связан с обоймой 9. В качестве преобразователя переменного тока в пульсирующий использован пульсирующий выключатель ипи диод 30, неподвижно устанолвенный на основании 1. Скоба механизма 31 неподвижно установлена на основании 1,
Устройство работает следующим образом.
При подаче напряжения на электромагнит через диод 30, в случае питания от источника переменного тока, или пульсирующий выключатель 30, з случае питания от источника постоян- кого тока, якорь 4 начинает движение увлекая за собой посредством тяги 5 рабочую тягу 14 прямого хода и шарнирно связанный с ней осью 6 один из концов рычага 7 обратного хода, который, поворачиваясь вокруг оси . вторым своим концом воздействует на рабочую тягу 15 обратного хода, сообща ей движение, противоположное движени якоря 4, при .этом если переключающие пластины 20 и ролики 13 находятся в верхнем относительно обоймы 9 положении, то рабочая тяга 14 прямого хода заклинится роликами 13 и увлечет за
5 0 5 с
Q
Г1
0
5
собой обойму 9, рабочая тяга 15 обратного хода свободно переместится в обойме 9 между роликами 13, так как направление ее движения противоположно направлению заклинивания, возвратные пружины 19 при этом сжаты.
При снятии импульса напряжения рабочая тяга 14 прямого хода под воздействием возвратньгх пружин 19 вернется в исходное положение, а рабочая тяга 15 обратного хода, если противодействующее усилие будет меньше усилия возвратных пружин 19, возвращаясь в исходное положение, сообщит обойме 9 ;-опопнительное перемещение в I v.KiioM ипправлении, а если противоде -,тву1ощее усилие больше усилия возвратных пружин 19, то возвращению обоймы в исходное положение препятствует заклинивание роликами 13 рабочей тяги 15 обратного хода.
Процесс повторяется до тех пор, пока не произойдет отключение электромагнита конечны выключателем 26 или не произойдет переключение направления дв1г«ения за счет скачкообразного перемеще 1ия переключающих пластин 20 совместно с роликами 13 из крайнего верхиегс положения в нижнее,. В этом случае обойма 9 соверщает возвратно-поступательные перемещения с заданной амплитудой.
Ручное оперирование приводом осуществляется путем перемещения ручки 22 в необходимом направлении.
При необходимости на рабочей тяге 14 прямого хода и рабчоей тяге обратного 15 xoria можно установить более одной обоймы 9.
Формула изобретения
на основании так, что один его конец шарнирно соединен с тягой электромагнита, а другой - с тягой обратного хода с возможностью взаимодействи с преобразователем переменного тока в пульсирующий ток, переключающие пластины установлены подвижно на обойме и связаны с ней через свои пружины, а pykoяткa для ручного управления и механизм переключения автоматическим выключателем, установлены неподвижно на обойме, причем рычаг переключения конечного выключателя подпружинен и шарнирно установлен на основании.
2/
26
Фиг А
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПУЛЬСИРУЮЩИЙ УДАРОВИБРОСТОЙКИЙ ПРИВОД | 0 |
|
SU180229A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
