Изобретение относится к электротехнике и может быть использовано в системах бесперебойного электроснабжения токоприемников ответственных потребителей переменного тока.
Целью изобретения является повышение надежности электроснабжения путем уменьшения массогабаритных показателей маховика.
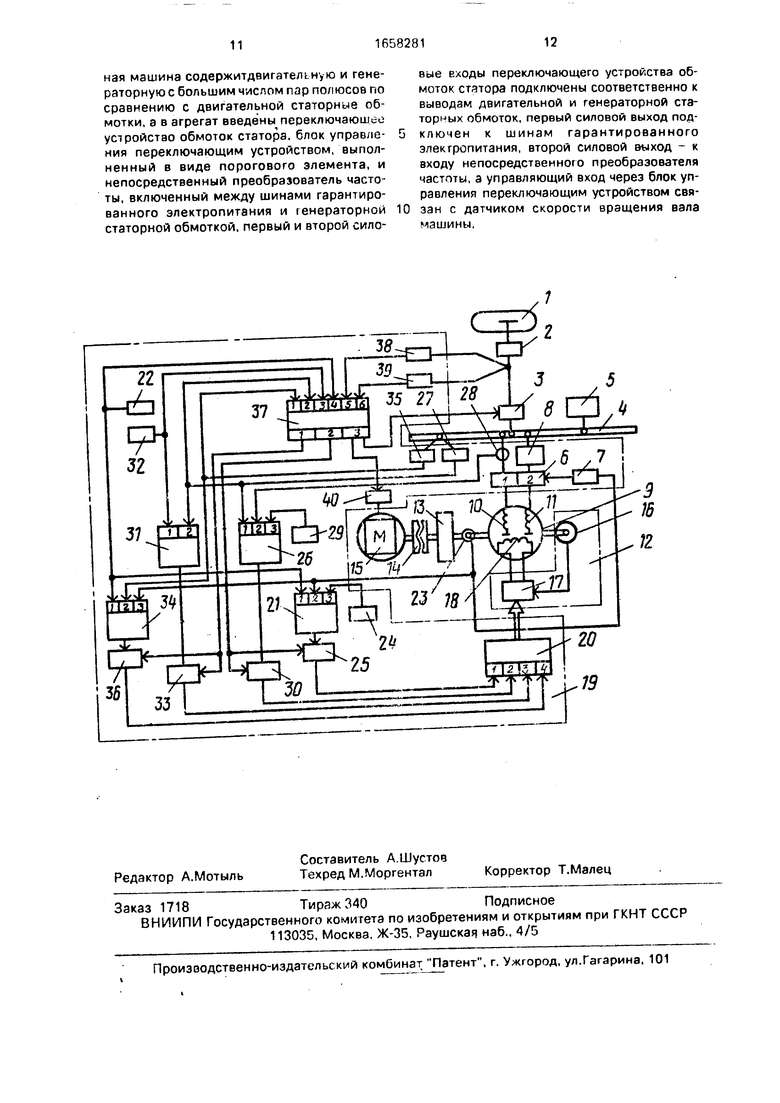
На чертеже приведена блок-схема агрегата бесперебойного электроснабжения.
Агрегат состоит из основного источника 1 питания, коммутационного аппарата 2, статического выключателя 3, шин 4 гарантированного электропитания с подключенными к ним токоприемниками 5 ответственных потребителей и через переключающее устройство 6 обмоток статора с блоком 7 управления переключающим устройством, непосредственного преобразователя 8 частого, асинхронизированной синхронной машины {АСМ) 9, содержащей двигательную статор- ную обмотку 10, подключенную к шинам 4 гарантированного электропитания через переключающее устройство б обмоток статора и генераторную статорную обмотку 11 с большим числом пар полюсов, по сравнению с двигательной обмоткой 10, подключенной к шинам 4 гарантированного электропитания через переключающее устройство 6 обмоток статора.
Преобразователь 8 частоты АСМ 9 имеет независимую систему 12 и инерционный маховик 13, связанный через разобщительную муфту 14 с первичным двигателем 15 Независимая система 12 возбуждения содержит расположенный на валу ротора АСМ 9 вспомогательный генератор 16, питающий силовую часть тиристорного преобразователя 17, подключенного выходом к обмотке 18 возбуждения АСМ 9.
Агрегат содержит систему 19 автоматического регулирования и управления, включает в себя преобразующе-командный блок 20 возбуждения, имеющий четыре входных канала регулирования и выходной канал управления тиристорным преобразователем 17 частоты, регулятор 21 скольжения скорости вращения вала машины, первый вход которого подключен к задатчику 22 частоты, второй вход подключен к датчику 23 скорости вращения вала машины, третий вход присоединен к задатчику 24 скольжения, а выход через переключающий элемент 25 регулятора скольжения подключен к первому каналу регулирования преобразующе-ко- мандного блока 20, выполненного в виде регулятора частоты напряжения возбуждения машины, регулятор 26 реактивной мощности, на первый вход которого подключен датчик 27 напряжения на шинах гарантированного питания 4, на второй датчик 28 тока, на третий - задатчик 29 реактивной мощности, а выход через переключающий элемент 30 регулятора реактивной мощности подключен к второму каналу регулирования преобразующе-командного блока 20, выполненного в виде регулятора величины и фазы напряжения возбуждения машины, регулятор 31 напряжения, к первому входу которого присоединен задатчик 32 величины напряжения, к второму - датчик 27 напряжения, а выход через переключающий элемент 33 регулятора напряжения подключен к третьему каналу регулирования блока 20, выполненного в виде регулятора величины напряжения возбуждения машины, регулятор 34 частоты, к первому входу которого
присоединен задатчик 22 частоты к второму входу - датчик 35 частоты напряжения на шинах 4 гарантированного питания, к третьему входу подключен датчик 23 скорости
вращения вала машины, а выход через пе ректючающий элемент 36 регулятора частоты присоединен к четвертому каналу преобразующе-командного блока 20. выполненного в виде регулятора частоты на
0 пряжения возбуждения машины.
Кроме того, агрегат включает в себя блок 37 контроля параметров напряжения сети с подключенными к первому входу датчиком 35 частоты, к второму входу датчиком
5 27 напряжения к третьему входу задатчи- ком 3 напряжения, к чэти ртому входу чч- датчиком 22 частоты, к пятому оходу датчиком 38 частоты основного источника питания к шестому входу датчиком 39 на
0 пряжения основного истопникз питания, а к первог у эыходу присоединены управляющие входы переключающих элементе 33 и 36, к второму выходу управляющие входы переключающих элементов 25 и 30 к тре-ь5 ему выходу управляющий вход статического выключателя 3 и вход реле 40 пуска первичного двигателя 15 Бпок 37 выпотнен в г„иде устройст-ва автоматическою повторною включения линии с двухсторонним пита0 нием и ожиданием синхронизма, точной автомагической синхронизацией с обеспечением контроля зэ совпадением фчз напряжений при синхронизации СМ 9 и источника 1, а также с обеспечение1 срав
5 нения заданных параметров напряжения на шинах с фактическими, отключением выключателя 3, включением элементов 33 и 36 отключением элементов 25 и 30 по факту недопустимого отклонения параметров
0
Агрегат работает следующим образом В нормальном режиме электроснаб е- ние токоприемников 5 ответственных потребителей осуществляется от источника 1
5 через юммутационный аппарат 2. стз1И - е- ский выключатель 3, шины 4 гарантированного электропитания, АСМ 9, двигательная статорная обмотка 10 которой через первый силовой выход переключающего уст0 ройства 6 обмоток статора подключена к шинам 4 гарантированного электропитание Обмотка 8 возбуждения получает пита- ьие через преобразователь 17 часготы от вспомогательного генератора 16 АСМ 9 ра5 ботает в режиме асинхронного компенсатора, а маховиком 13 запасается кинетическая энергия. Разобщительная муфта ч4 разобщена и первичный двигатель 15 находится в готовности к пуску. В этом режиме управление АСМ 9 осуществляется по заданной величине скольжения вала ротора и реактивной мощности статора.
Поддержание заданного скольжения вала ротора обеспечивается регулятором 21 скольжения, на первый вход которого поступает сигнал с зэдатчика 22 частоты, на второй вход с датчика 23 угловой скорости вращения вала машины сигнал, соответствующий фактической угповой скорости вращения, а на третий вход - с задатчика 24 скольжения сигнал, соответствующий заданной величине скогьжения. Регулятор 21 скольжения определяет фактическую величину и знак скольжения, сравнивает его с заданной величиной, если величина и знак фактического скольжения отличаются от заданного, то выполняет корректировку и формирует на выходе сигнал регулировй- . ния, который через открытый переключающий элемент 25 поступает на первый канал регулирования преобразующе-хомандниго блока 20.
Регулирование величины реактивной мощности статора АСМ 9, выдаваемой в источник 1, осуществляется регулятором 26 реактивной мощности. На первый вход регулятора 26 реактивной г эщности с датчика
27напряжения поступает оигнач. соответствующий фактической напряже ния на шинах 4 гарантированного электропитания, на второй вход с датчика
28тока поступает сигнал, соответствующий фактической величине тока статора АСМ 9, на третий вход с задатчика 29 реактивной мощности поступает сигнал, соответствующий заданной величине реактивном мошноСТИ.
Регулятор 26 реактивной мощности определяет фактическую величину реактивной мощности статора АСМ 9, сравнивает ее с заданной величиной реактивной мощности, если величина фактической реактивной мощности отличается от заданной, то выполняет корректировку и формирует на выходе сигнал регулирования, кст-рый через открытый переключающий элемент 30 поступает на второй канал регулирования пре- образующе-командного блока 20. Последний преобразует поступающие на первый и второй каналы регулирования сигналы с регулятора 21 скольжения и регулятора 26 реактивной мощности в такой сигнал управления преобразователем 17 частоты, который определяет частоту, амплитуду, фазу напряжения возбуждения на его выходе. Это позволяет создать обмоткой 18 возбуждения ротора вращающееся относительно него в нужном направлении круговое поле с требуемой по режиму работы амплитудой, частотой и фазой, обеспечивающими заданное скольжение вала ротора и величину реактивной мощности статора АСМ 9.
Одновременно блок 37 контроля параметров сети постоянно сравнивает поступающий на шестой вход с датчика 39 напряжения сигнал, соответствующий фактическому значению величины напряжения источника 1. с сигналом, поступающим на
0 третий вход с задатчика 32 напряжения, и поступающий на пятый вход с датчика 38 частоты сигнал, соответствующий фактическому значению величины частоты напряжения источника 1, с сигналом, поступающим
5 на четвертый вход с задатчика 22 частоты.
При несоответствии сигналов со стороны источника 1 сигналам задатчика 22 час- тсты и задатчика 32 напряжения или при полном прекращении питания со стороны
0 источника 1 блок 37 формирует сигналы на первом выходе на закрытие переключающих элементов 33 и 36, а нз третьем выходе на отключение статического выключателя 3 и включение реле 40 пуска первичного дви5 гателя 15. При воздействии сигнала закрывается переключающий элемент 25, в результате прекращается подача сигнала регулирорзния на первый канал регулирования блока 20 с регулятора 21 скольжения и
0 закрывается переключающий элемент 30, прекращающий подачу сигнала регулирования на второй канал регулирования блока 20 с регулятора 25 реактивной мощности Одновременно открывается переключающий
5 элемент 33, через который на третий канал регулирования блока 20 поступает сигнал регулирования с регулятора 31 напряжения, и открывается переключающий элемент 36. обеспечивающий подачу сигнала регулиро0 влния на четвертый канал регулирования блока 20. При этом под воздействием сигнала управления, формируемого на третьем выходе блока 37 контроля параметров сети, отключается статический выключатель 3, от5 деляя от источника 1 шины 4 гарантированного электропитания с присоединенными к ним токоприемниками 5 ответственных потребителей, последние получают питание от АСМ 9, переведенной в режим генератора и
0 использующей запасенную кинетическую энергию инерционного маховика 13. Включается реле 40 пуска, осуществляя запуск первичного двигателя 15. В этом автономном режиме управления АСМ 9 осуществля5 ется по заданной величине напряжения и частоты на шинах 4 гарантированного электропитания.
Поддержание заданной величины напряжения на шинах 4 гарантированного электропитания обеспечивается регулятором 31 напряжения, на первый вход которого поступает с задатчика 32 напряжения сигнал, соответствующий заданной величине напряжения, на второй вход поступает с датчика 27 напряжения сигнал, соответствующий фактической величине напряжения на шинах 4 гарантированного электропитания. Регулятор 31 напряжения сравнивает фактическую величину напряжения с заданной величиной, если она отличается от заданной, то выполняет корректировку и формирует на выходе сигнал регулирования, который через открытый переключающий элемент 33 поступает на третий канал регулирования блока 20.
Регулирование величины частоты напряжения статора осуществляется регулятором 34 частоты, на первый вход которого с задатчика 22 частоты поступает сигнал, соответствующий заданной величине частоты, на второй вход поступает с датчика 35 частоты сигнал, соответствующий фактическому значению частоты напряжения на шинах 4 гарантированного электропитания, на третий вход поступает с датчика 23 угловой скорости вращения вала машины сигнал, соответствующий фактическому значению угловой скорости. При снижении угловой скорости вращения вала машины до минимальной соответствующей предельно допустимой угловой скорости вращения
вала, при которой АСМ 9 с подключенной двигательной статорной обмоткой 10 к шинам 4 гарантированного электропитания обеспечивает требуемую частоту напряжения, блок 7 управления переключающим устройством по сигналу, поступающему с датчика 23 угловой скорости, формирует сигнал на срабатывание переключающего устройства 6 обмоток статора, обеспечивающего отключение двигательной статорной обмотки 10 с меньшим числом пар полюсов и подключение генераторной статорной обмотки 11с большим числом пар полюсов. При воздействии сигнала переключающее устройство б подключает через непосредственный преобразователь 8 частоты генераторную статарную обмотку 11 с большим числом пар полюсов к шинам 4 гарантированного электропитания и отключает двигательную статорную обмотку 10. При этом регулятор 34 частоты формирует на выходе такой сигнал, величина которого пропорциональна разности сигналов фактической угловой скорости вращения вала и заданной величине частоты, постоянно сравнивает соответствие фактического значения частоты на шинах 4 гарантированного электропитания с заданным, при необходимости корректирует выходной сигнал, который через переключающий элемент 36 поступает на четвертый канал регулирования блока 20. Преобразующе-командный блок 20 пре образует поступающие на третий и четвертый каналы регулирования сигналы с регулятора 31 напряжения и регулятора 34 частоты в такой сигнал управления преобра зователем 17 частоты, который определяет частоту, амплитуду напряжения еозбужце0 ния. Это позволяет создать обмоткой 18 возбуждения вращающееся относительно ротора в нужном направлении круговое поле с требуемой по режиму работы амплитудой, частотой и фазой, обеспечивающими
5 заданное значение напряжения и частоты на шинах 4 гарантированного электропитания.
Таким образом, обеспечивается электроснабжение токоприемников 5 ответствен0 ных потребителей электроэнергией требуемого качества от АСМ 9. работающей в генераторном режиме, на время запуска и выхода на номинальные обороты первичного двигателя 15.
5После выхода на номинальные обороты
первичного двигателя 15 включается разобщительная муфта 14. привод АСМ 9 начинает осуществляться от первичного деигагеля 15. При этом с датчика 23 угловой скорости
0 вращения вала АСМ 9 на входе блокг 7 управления переключающим устройством появляется сигнал, обеспечивающий срабатывание переключающего устройства 6 обмоток статора, которое отключает гене5 раторную статорную обмотку 11 и подключает двигательную .статорную обмотку 10 к шинам гарантированного электропитания 4.
Восстановление напряжения со сторо0 ны электросети 1 фиксирует блок 37 контроля параметров напряжения сети, который постоянно сравнивает поступающий на шестой вход с датчика 39 напряжения сигнал, соответствующий фактическому значению
5 напряжения источника 1, с сигналом, поступающим на третий вход с задзтчика 32 напряжения и поступающий на второй вход с датчика 35 напряжения сигнал, соответствующий фактическому значению напряжения
0 на шинах гарантированного электропитания, а поступающий на пятый вход с датчика 38 частоты сигнал, соответствующий фактическому значению частоты напряжения источника 1, сравнивает с сигналом,
5 поступающим на четвертый вход с зэдатчи- ка 22 частоты, и поступающим на первый вход с датчика 27 частоты сигналом, соответствующим фактическому значению частоты напряжения на шинах 4 .гарантированного электропитания.
При соответствии всех величин и выпо/ - нении условий синхронизации, позволяющих включить на параллельную работу с электросетью АСМ 9 блок 37 контроля параметров напряжения сети, отменяет на третьем выходе сигнал на отключение статического выключателя 3 и включение пускового реле 40, на первом выходе сигнал на отключение переключающих элементов 33 и 36, на втором выходе сигнал на включение переключающих элементов 25 и 30. При этом включается статический выключатель 3 и соединяет с источником 1 шины 4. Выключается реле 40 пуска, первичный двигатель 15 останавливается. Одновременно закрывается переключающий элемент 33 в результате прекращается подача сигнала регулирования на третий канал регулирования блока 20 с регулятора 31 напряжения, закрывается переключающий элемент 36. прекращающий подачу сигнала регулирования на четвертый канал регулирования бло ка 20, прекращение поступления сигналов на третий и четвертый канал регулирования блока 20 служит для него командой перево- дауправления АСМ 9 из режима синхронного генератора в режим асинхронного компенсатора. Также открываете я чающий элемент 25, через который на гер- в hi и канал регулирования блока 20 поступает сигнал с регулятора 21 скольжения и открывается переключающий элемент 30, обеспечивающий подачу сигнала регулирования на второй канал регулирования блока 20 с регулятора 26.
Таким образом, система бесперебойного электроснабжения токоприемников ответственных потребителей от сети переменного тока работает н исходном режиме.
В предлагаемом агрегате увеличивается глубина реализуемого разряда кинетической энергии маховика при одном и том же времени работы, поэтому масса маховика уменьшается.
Формула изобрети и я
Агрегат бесперебойного электроснабжения, содержащий сетевой ввод, включенный через статический выключатель на шины гарантированного электропитания, к которым присоединена асинхронизиро- ванная синхронная машина с независимым возбуждением и маховиком на валу, снабженная системой автоматического управления, состоящей из преобразующе-ко- мандного блока возбуждения, регулятора реактивной мощности, регулятора величины напряжения с задатчиком величины напряжения, регулятора скольжения скорости вращения вала машины, регулятора частоты
напряжения статора с задатчиком частоты, а также четырех переключающих элементов и блока контроля параметров наппяжония сеги, к входам которого подключены состветственно выходы датчика частоты и напряжения на шинах гарантированного питания, задатчика величины напряжения, задатчика частоты, датчиков частоты и напряжения основного источника питания,
0 первый выход подключен к управляющим входам переключающих элементов регулятора напряжения и регулятора частоты, второй выход к улрарлчющим входам переключающих элементов регулятора ре5 активной мощности и регулятора скольжения, третий выход - к цепи управления статического выключателя, выход регулятора скольжения через переключающий элемент подключен к первому каналу
0 регулироЕзания пресбразующе-командного блока, выполненного в виде регулятора частоты напряжения возбуждения машины, вы ход регулятора активной мощности через переключающий элемент подключен к вто5 рому каналу регулирования преобразующе- командного блока, выполненного в виде регулятора величины и фазы напряжения возбуждения машины, выход регулятора напряжения через переключающий элемент
0 подключен к третьему каналу регулирования преобраэующе-комамдкого блока, выполненного в виде регулятора величины напряжения возбуждения млшины, выход регулятора частоты через переключающий
5 элемент подключен к четвертому каналу регулирования преоб разу юще-к Оман дного блока рыполненного R виде регулятора частоты напряжения возбуждения машины, а блок контроля выполнен в виде устройства
0 автоматического повторного включения линии с двухсторонним питанием и ожиданием синхронизма, точной автоматической синхронизацией с обеспечением контроля за совпадением фаз напряжении при синх5 ронизации асинхронизированной синхронной машины и основного источника питания, а также с обеспечением сравнения заданных параметров напряжения на шинах гарантированного питания с факти0 ческими и отключением статического выключателя, включением переключающих элементов регуляторов напряжения и частоты и отключения переключающих элементов регуляторов скольжения и реактивной мощ5 ности по факту недопустимого отклонения фактических параметров от заданных, о т- личающийся тем, что, с целью повышения надежности электроснабжения путем уменьшения массогабаритных показателей маховика, асинхронизированная синхронная машина содержитдвигательную и генераторную с большим числом пар полюсов по сравнению с двигательной статорные обмотки, а в агрегат введены переключающее устройство обмоток статора, блок управления переключающим устройством, выполненный в виде порогового элемента, и непосредственный преобразователь частоты, включенный между шинами гарантированного электропитания и генераторной статорной обмоткой, первый и второй сило0
вые входы переключающего устройства обмоток статора подключены соответственно к выводам двигательной и генераторной ста- ториых обмоток, первый силовой выход подключен к шинам гарантированного электропитания, второй силовой выход - к входу непосредственного преобразователя частоты, а управляющий вход через блок управления переключающим устройством связан с датчиком скорости вращения вала машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Агрегат бесперебойного электроснабжения | 1990 |
|
SU1739439A1 |
| Система бесперебойного электроснабжения | 1989 |
|
SU1677778A1 |
| Система бесперебойного электроснабжения | 1984 |
|
SU1334268A1 |
| Агрегат бесперебойного электроснабжения | 1990 |
|
SU1764119A1 |
| Устройство для связи двух энергосистем | 1985 |
|
SU1293788A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Ветродизельэлектрическая установка | 1991 |
|
SU1813918A1 |
| АСИНХРОНИЗИРОВАННЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 1990 |
|
RU2020689C1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
Изобретение относится к электротехнике и может быть использовано в системах бесперебойного электроснабжения токоприемников ответственных потребителей переменного тока. Цель изобретения - повышение надежности электроснабжения путем уменьшения массообаритных показателей маховика. В агрегате бесперебойного электроснабжения применена асинхронизированная синхронная машина с маховиком, содержащая двигательную и генераторную (с большим числом пар полюсов по сравнению с двигательной) статор- ные обмотки. В систему автоматического управления машиной введены переключающее устройство обмоток статора, блок управления переключающим устройством и непосредственный преобразователь частоты, включенный между шинами гарантированного электропитания и генераторной статорной обмоткой, причем первый и второй силовые входы переключающего устройства обмоток статора подключены соответственно к выводам двигательной и генераторной статорных обмоток. Первый силовой выход подключен к шинам гарантированного электропитания, второй силовой выход - к входу непосредственного преобразователя частоты, а управляющий вход - к выходу блока управления переключающим устройством, вход которого подключен к датчику угловой скорости вращения вала ротора. При отказе основного источника питания асинхронизированная синхронная машина работает в генераторном режиме, однако сначала питание токоприемников происходит от двигательной статорной обмотки с меньшим числом пар полюсов, а затем от генераторной обмотки с большим числом пар полюсов. Тем самым обеспечивается большая глубина разряда маховика. 1 ил. fe I О ел 00 ю 00
| ;Патент США Nfe 4203041, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Система бесперебойного электроснабжения | 1984 |
|
SU1334268A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
