частотным методом регулирования скорости, где управление обычно осуществляется по роторной цепи. Скорость двигателя равна
({,ty/P ,
где f и f 2 - частоты питания статорной и роторной обмоток Асинхронный двигатель р данном устройстве может работать в двух режимах: асинхронном (каскадные схемы постоянного момента и мощности), когда частота переключения тиристоров роторного преобразователя является функцией скорости двигателя, и синхронном, когда частота питания ротора принудительно задается от внеинего генератора. В последнем случае, скорость двигателя не зависит от изменения нагрузки и от колебаний напряжения питания. В подобных- устройствах обмотка статора .асинхронного двигателя подключена непосредственно к сети. Регулирование скорости осуществляется изменением частоты .питания роторной цепи посредством задающего генератора, выходная частота которого определяет выходную частоту статического преобразователя частоты, включенного в роторную цепь двигателя и управляемого посредством блока управления преобразователем.
Напряжение питания двигателя при изменении скорости регулируется посредством управляемого выпрямителя. При f t fj и одноименном порядке следования фаз из выражения, указанного выше, следует, что . О, т.е. низкие скорости получаются при час,тоте и напряжении роторной обмотки, близких к номинальным значениям . Следовательно,угол зажигания вентилей выпрямителя минимальный, пульсации на низких скоростях незначительны, коэффициент мощности роторного преобразователя имеет максимальное значение и генерация высших гармоник в питающую сеть практически отсутствует. При этом отпалает необходимость в использовании силового фильтра, в связи с чем возрастает быстродействие системы, снижаются габариты устройства и колебательность. Активное сопротивление роторной цепи начинает- .« оказывать влияние при fj, бликой, к половине нсичинального значения, когда скорость двигателя достигает величины, равной половине номинёльной (синхронной), Весьма низкие скорости вращения, а следовательно, и широкий диапазон регулирования получается в даннс случае при незначительной вариации частоты ротора.
Бесконтактный реверс двигателя осуществляется путем повышения частоты fj. по сравнению с частотой fi, По мере приближения к
синхронной скорости перегрузочная способность и момент двигателя уменьшаются. Дальнейшее повышение скорости от синхронной до двойной синхронной производится изменением порядка е следования фаз роторного напряжения и повышением частоты тока ротора. При аварийной скорости частота и напряжение роторной обмотки равны. номинальному значению. В случае постоянного статического момента Mt MHOM const двигатель развивает на валу двойную мощность по сравн.ению с номинальной мощностью асинхронного двигателя.
Таким образом, перекрытие диапазона скоростей от нуля до двойной
синхронной в устройствах с разностночастотным управлением обеспечивается изменением частоты питания роторной обмотки от номинального значения
0 до нуля и наоборот.
Однако большой диапазон изменения частоты усложняет реализацию устройства управления.
5 Наиболее близким техническим решением к изобретению.является устройство для частотного управления асинхронным двигателем с фазным ротором, где одновременно используются пропорционально-частотный и разностночастотный методы регулирования 2. Обмотки статора и ротора соединены последовательно так, чтобы порядок следования фаз. статора и ротора был различный и затем подключался к статическому преобразователю частоты, получающего питание от сети постоянного или переменного тока. Таким образом, скорость двигателя всегда равна двойной синхронной по отношению к частоте питания двигателя.
Требуемая скорость двигателя устанавливается посредством задатчика скорости вращения двигателя, сигнал с которого после преобразования в
е блоке сравнения определяет уро.вень напряжения частоты питания двигателя. Придание системе определенных динамических свойств в данном случае осуществляется включением двух контуров
J. обратной связи по скорости посредс :вом тахометра и по углу поворота ротора.
Регулирование скорости в данном устройстве осуществляется пропорционально-частотным методом управления
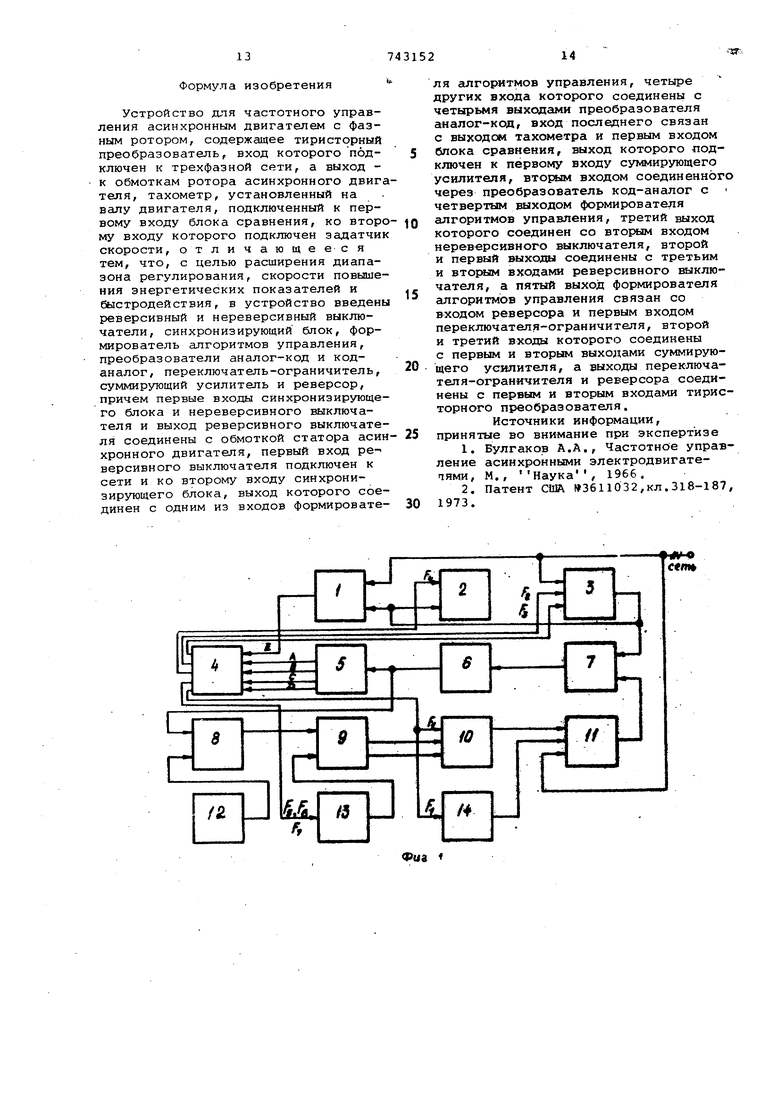
5 при изменении частоты одновременно на статорной и роторной обмотках, включенных по схеме с разностно-частотным управлением. В связи с этим преимущества устройств с пропорционально-частотным и раэностно-частотным управлением используются только в ограниченной области скоростей при изменении частоты преобразователя от номинальной до приблизительно половины номинальной, а получение малых скоростей влечет появление те недостатков, которые присущи устрой ствам с пропорционально-частотным управлением двигателя. Цель изобретения - расширение ди пазона регулирования скорости, повы шение энергетических показ ателей и быстродействия. Указанная цель достигается тем, что в устройство для частотного упр ления асинхронным двигателем с фазн ротором, содержащее тиристорный пре образователь, вход которого подключ к трехфазной сети, а выход - к обмо кам ротора асинхронного двигателя, тахометр, установленный на валу аси хронного двигателя, подключенный к первому входу блока сравнения, ко в рому входу которого подключен задат чик скорости, введены реверсивный и нереверсивный выключатели, синхро низирующий блок, формирователь алго ритмов управления, преобразователи аналог-код и код-аналог,переключате ограничитель , суммирующий усилитель и реверсор,причем первые входы синх низирующего блока и нереверсивного выключателя и выход реверсивного выключателя соединены с обмоткой ст тора асинхронного двигателя, первы вход реверсивного выключателя подкл чен к сети и ко второму входу синхр низирующего блока, выход которого соединен с одним из входов формирователя алгоритмов управления, четыр других входа которого соединены с четырьмя выходами преобразователя аналог-код, вход последнего связан с выходом тахометра и первым входом блока сравнения, выход которого под ключен к первому входу суммирующего усилителя, вторым входом соедине ного через преобразователь код-аналог с четвертым выходом формирователя алгоритмов управления, третий выход которого соединен со вторым входом нереверсивного выключателя, второй и первый выходы соединены с третьим и вторым входами реверсивного выключателя, а пятый выход формирователя алгоритмов управления связан со входом реверсора и первым входом переключателя-ограничителя, второй и третий входыкоторого соединены с первым и вторым выходами суммирующего усилителя, а выходы переключателя-ограничителя и реверсо ра соединены с первым и вторым входами тиристорного преобразователя. На фиг.1 представлена блок-схема устройства для управления асинхронным двигателем с фазным ротором; на фиг.2,3 и 4 - диаграммы работы устройства. Устройство содержит синхронизирующий блок 1, который соединен по входу с нереверсивным 2 и реверсивным 3 выключателями, а выходом с формирователем 4 алгоритмов управления, основные четыре входа которого соединены через блок-преобразователь 5 аналог-код с тахометром б, установленном на валу асинхронного двигателя 7 с фазным ротором. Блок 8 сравнения первым входом связан с тахометром 6, а выходом через суммирующий усилитель 9, переключательограничитель 10 связан с преобразователем 11 частоты. Задатчик 12 скорости соединен со вторым входом блока 8сравнения. Преобразователь 13 коданалог входом соединен с выходом формирователя 4 алгоритмов управления, а выходом с суммирующим усилителем 9. Реверсор 14 входом подключен к формирователю 4, переключателю-ограничителю 10, а выходом - к входу преобразователя .11 частоты. Выключатель 3 предназначен для подключения статора двигателя 7 к трехфазной сети переменного тока с прямым или обратным чередованием фаз на его статорных обмотках, а выключатель 2 -, для закорачивания статорной цепи.. Выходной сигнал синхронизирующего блока 1 при разности фаз напряжений на его входах в ffC эл.рад. через формирователь 4 алгоритмов управления осуществляет формирование сигнала на включение реверсивного выключателя 3 при переходе из асинхронного режима работы двигателя 7 в синхронный режим двойного пит-ания. Измерение выходного параметра устройства производится тахометром 6. Блок 8 сравнения выявляет разницу между сигналами выхода задатчика 12 скорости и тахометра 6, которая далее корректируется в суммирующем усилителе 9преобразователем код-аналог 13 и усиливается в три раза. Суммирующий усилитель 9 имеет два выхода - прямой и инверсный, которые коммутируются переключателем-ограничителем 10 на первый вход преобразователя 11 частоты. Переключатель-ограничитель 10предназначен для обеспечения знака связи по выходному параметру отрицательным независимо от способа регулирования скорости двигателя 7 и ограничения амплитуды напряжения на первом входе блока 11. Управление переключателем-ограничителем 10, как и реверсором 14, предназначенным для изменения чередования фаз напряжения на выходе преобразователя 11 частоты, осуществляется выходным напряжением формирователя 4 алгоритмов управления, пятым его выходом. Принцип работы устройства поясняется диаграммой (фиг.2), где представлены регулировочные характеристики асинхронного двигателя с фазным ротором. По оси ординат отложено относительное значение скорости
.йрсицения ротора г а по оси абсцисс - относительная частота питающего роторные обмотки напряжения f-i, / fn , где 00-t,- скорость вращения ротора; - синхронная скорость вращения ротора при номинальных значениях питающего напряжения; f - частота напряжения, подводимого к роторным обмоткам; f; - номинальное значение частоты
.питающего напряжения.
Первая прямая, проходящая через
начало координат, отражает регули.ровочную характеристику двигателя при пропорционально-частотном способе регулирования скорости, вторая при разностно-частотном способе и прямой последовательности чередования фаз на обмотках статора, третья - при разностно-частотном способе, но с обратным чередованием фаз на статорных обмотках.. В устройстве используются только те скоростные зоны регулировочных характеристик, .где частота роторного напряжения изменяется в диапазоне от. 0,5 f., до 1,5 f , т.е. LD, DC, СА, дв, вк.
Работа двигателя в каждой из указанных зон кодируется по уровню сигнала тахометра б, преобразователем 5 аналог-код и представлена двоичными переменными в табл.1.
При переходах из одной скоростной зоны в другую необходимо изменять состояние выключателей 2 и 3 в статорной цепи двигателя, реверсора 14 в роторной цепи, скачкообразно изменять частоту и напряжение преобразователя частоты, а также производить переключения переключателя-ограничителя 10.
.Взаимосвязь между состояниями переключателей; в зависимости от переменных А, В, С, D (табл.1) при работе в каждой из скоростных зон, а также последовательность изменения их состояния при переходах из одной
скоростной зоны двигателя в другую
представлена в табл.2,
в левых столбцах указанной табли цы для. каждой из функций К-Р- отражно изменение состояний этих двух ФУН16ЦИЙ при .регулировании скорости в направлении от -2,5(fi), до +2.5 й)о/()г г а в правых - от +2,5 Cfi) до - 2,5 ООо/СУч .
р. - функция, управляющая реверсором 14 и переключателем-ограничителем 10. При Ft 1 ко входу преобразователя 11 частоты подключаетс прямой выход суммирующего усилителя 9, а на выходе преобразователя 11 частоты устанавливается прямое чередование фаз.
F, FJ - функции, управляющие прямым и обратным чередованием фаз трехфазного напряжения сети на обмотках статора двигателя. При Р 1 чередование фаз обратное, при Р 1 чередованиефаз прямое, а при Р РЗ О обмотка статора отключаетс от сети.
Fg- функция, управляющая закорачиванием обмотки статора и при Pj, 1 обмотка зак орочена.
Рг , РЗ , Р;, - -функции переменных FS. , Р , Fif и временной задержки, обусловленной временем включения и выключения выключателей 2 и 3.
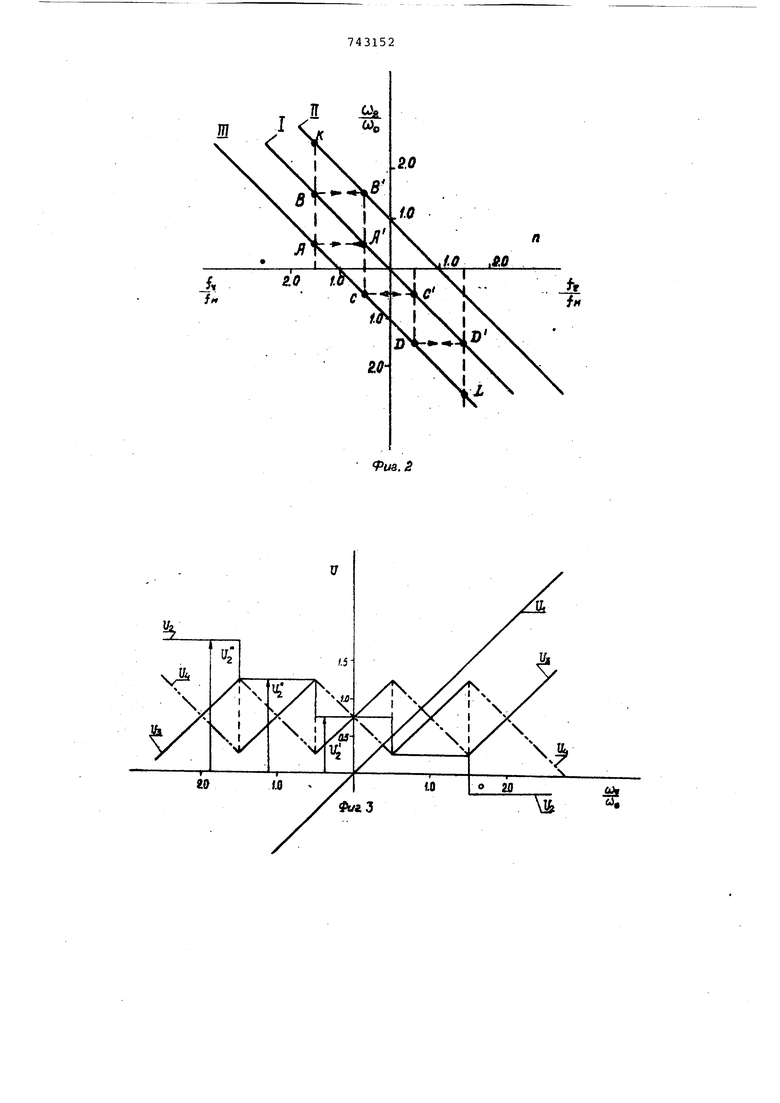
Pj, Pfc, F - двоичные переменные преобразуемые преобразователем 13 код-аналог в напряжение и, пропорциональное номеру набора и смещенно соответствующим образом относительн нулевого значения этого напряжения (фиг.З). Запись функций Р, - Р: преставлена в табл.2.
PI А-В В-А-К AF/CBK ;
PJ, А В F, Е APi/ СВЕ ;
FJ oi; Е ;
А В С pj- ABCPjl DFj ;
5 Ч
Ре FI - , .
F РЗ F/,
где Е - двоичная переменная на выходе синхронизирующего блока.
FJ Рг ( Л t) Pg, - Ра Рг. (At) РЗ FJ . РЗ ( 4 t) . F FJ PJ (At) F4 iF,. Pi, { Д t) . Fi/ P F/, (At)
К - промежуточная переменная в (п + 1) такте,
„() г„п-(ш1) -п „Си.-1).. п )
к U П Р
Р, X
г
- / (ни) -trb - In in
РЗ. X
X Рг . Р, . F
-/(mi)-/Cftti}-(rtfi)
2 3 Ч
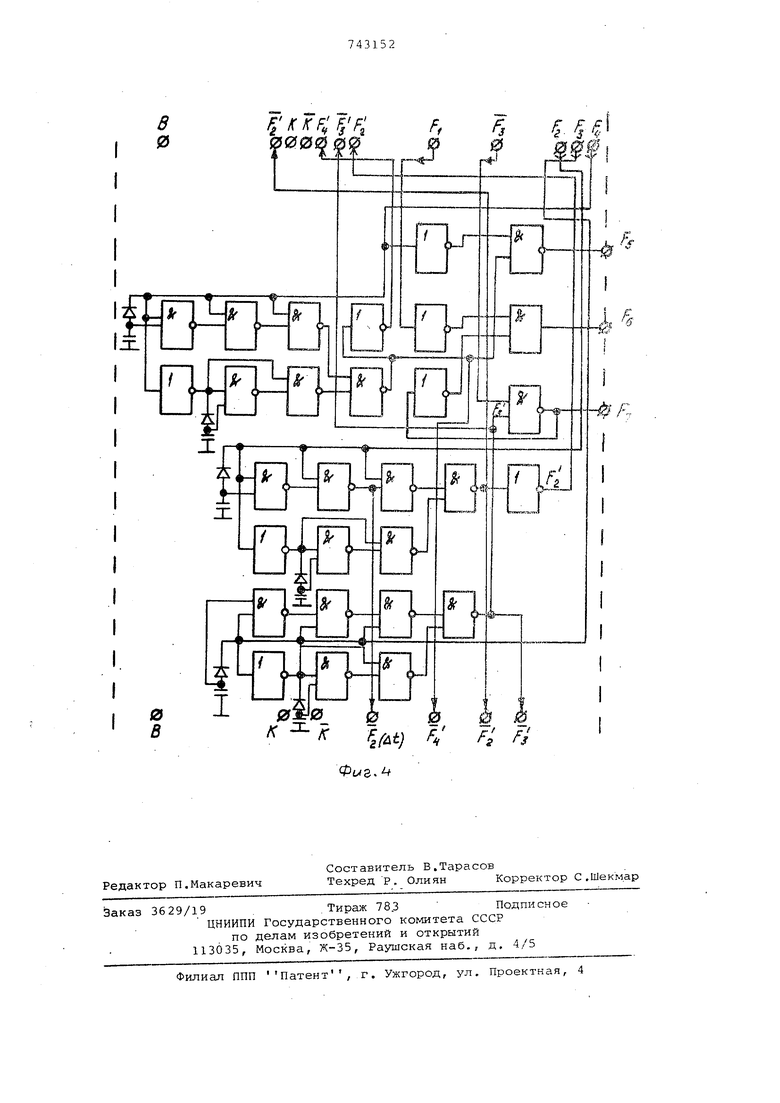
Приведенные выше функции Р. - F:J. двоичных переменных А , В, С, D, Е реализуются формирователем 5 алгоритмов управления.
На фиг. представлены следующие зависимости:
и - напряжение на выходе блока
8 сравнения;
U2 - напряжение на выходе преобразователя 13 код-аналог; %( Uij-соответственно напряжение
на прямом выходе суммирующего усилителя 9 и на инверсн ом.
Зависимость относительной частоты питания обмоток ротора (.) на выходе преобразователя 11 частоты от напряжения Оз , поступающих с выхода переключателя-ограничителя 10 представлены на фиг. 4, где V-, U а Uc, Uiy . Работу устройства поясним для сл чая регулирования скорости двигател 7 в диапазоне от нуля до -2,5(j)/( (фиг.2). Задатчиком 12 скорости уст навливается напряжение на первом вх де блока 8 сравнения, равное нулю. При неподвижном двигателе 7 с выход тахометра б получаем напряжение, та же равное нулю. Значение переменных на выходе блока 5 в рассматриваемый момент времени согласно табл.1 следующие: ,. В COO ветствии с табл.2 выходные переменные формирователя 4 алгоритмов преобретают значения F F, 0; F 1. При такой комбинации напряже ние на выходе преобразоватез|я 13 код-аналог имеет значение Ug (фиг.З На прямом выходе суммирующего усили теля 9 имеем согласно равенству 1) и/ + Uj Ug , а на инверсном J у f о. по f4. и л Щ - (и + QI -2U2, ) и, где 2и амплитуда внутреннего источника смещения суммирующего усилителя 9. На пятом выходе формирователя 4 алгоритмов образуется логический ноль, и ко входу преобразователя 11 частоты посредством переключателя-ограничителя 10 подключается инвертирующий выход суммирующего усилителя 9, а с помощью реверсора 14 устанавливается обратнбе чередование фаз на выходе преобразователя 11 частоты. При этом выходная частота преобразователя 11 частоты 1 момент времени, когда на выходе синхронизирующего блока 1 появится логическая единица, функция FJ приобретает также единичное значение. Обмотка статора выключателем 3 присоединяется к сети с обратным чередованием фаз. После включения выключателя 3 асинхронный двигатель работает в синхронном режиме двойного питания (участок АС фиг.2). При увеличении задания задатчиком 12 скорости двигатель увеличивает скорость и при достижении значения - 0,5 u)/C3t)o, преобразователь аналог-код изменяет состояние выходов на следующие , В- С D О (табл.1) . Формирователь 4 алгоритмов управ ления формирует следующую последова тельность состояния выходов (табл.2 Fj принимает значение логическог О, что приводит к отключению обмотк статора двигателя 7 выключателем 3 от сети; через промежуток времени At фун ция Fj также принимает значение логического О, что свидетельствует об отключении вы1 лючателя 3; при F FZ, О функция F) 1. Это приводит к изменению порядка следования фаз напряжения роторной цепи и подключению инверсного выхода усилителя 9 ко входу преобразователя 11 частоты. Функция Fc,- вызывает. увеличение напряжения на выходе реверсора 14 до значения . Однако . благодаря использованию инверсного выхода усилителя 9, указанные переключения не изменяют предшествующего переключению напряжения на входе преобразователя 11 частоты (фиг.З и 4). В момент времени, когда функция О, функция Ft 1, что влечет за собой включение выключателя 2 и закорачивание обмотки статора. При этом двигатель работает как асинхронный при питании со стороны ротора и крроткозамкнутой статорной обмотки. При увеличении напряжения задатчика 12 скорости и достижения ротором скорости - 1,)о , преобразователь аналог-код изменяет состояние выходов в соответствии с табл.1 на следующие значения: А В С . D 0. Формирователь алгоритмов формирует следующую последовательность переключений: Fif- О, а через промежуток времени At и F(| О, что вызывает отключение выключателя 2; F О, напряжение на выходе преобразователя код-аналог изменяется до величины и, а, следовательно, изменяется скачком в три раза частота на выходе преобразователя 11 частоты И (фиг.З и 4J. Fj принимает единичное значение и выключатель 3 подключает статор двигателя к сети с обратным чередованием фаз сразу после появления на выходе синхронизирующего блока логической 1. Дальнейшее увеличение напряжения задатчика скорости вызывает увеличение скорости вращения вала двигателя до -2,5С)/ОО(,. Уменьшение скороети до О каждый раз при переходе из одной скоростной зоны в другую будет происходить в соответствии с табл.2 по правым столбцам значений двоичных функций с F. - F- и соответствующих командах на переключение преобразоват.елем 5 аналог-код. Необходимо отметить, что координаты точек стыка различных режимов (точки А, В и т.д.) могут варьироваться в зависимости от мощности и типа двигателя, величины нагрузки на валу двигателя и коэффициента усиления контура обратной связи по скорости. Таким образом, данное устройство расширяет диапазон регулирования скорости, причем максимальный диапазон варьирования питающей частоты при регулировании скорости в широких
пределах (от О до 2,5 синхронной) составляет всего 1:3 (25 - 75 Гц), В связи с этим параметры двигателя остаются практически постоянными, что позволяет также иметь постоянными параметры и структуру цепей коррекции. По этой же причине напряжение на двигателе изменяется незначительно, поэтому угол зажигания управляющего выпрямителя регулируется вблизи нулевого значения в малом диапазоне, что приводит к уменьшению .пульсаций выпрямленного напряжения, повышению коэффициента мощности, снижению габаритов силового фильтра или полное его устранение, а, следовательно, к повышению быстродействия
всего устройства. Быстродействие также повышается за счет высокой перегрузочной способности двигателя, достгаемая в данном устройстве во всем диапазоне.
В данном устройстве исключается проблема плавного перехода, через синхронную скорость, возникающую в устройствах с разностно-частотным методом управления, поскольку двигатель используется в той области частот, где роль активного сопротивления обмоток не оказывает влияния, он имеет во всем диапазоне скоростей и нагрузок оптимальные рабочие характеристики.
1 Формула изобретения Устройство для частотного управления асинхронным двигателем с фазным ротором, содержащее тиристорный преоОразователь, вход которого подключен к трехфазной сети, а выход к обмоткам ротора асинхронного двиг теля, тахометр, установленный на валу двигателя, подключенный к первому входу блока сравнения, ко втор му входу которого подключен эадатчи скорости, отличающееся тем, что, с целью расширения диапазона регулирования, скорости повышения энергетических показателей и быстродействия, в устройство введены реверсивный и нереверсивный выключатели, синхронизирующий блок, формирователь алгоритмов управления, преобразователи аналог-код и коданалог, переключатель-ограничитель, суммирующий усилитель и реверсор, причем первые входы синхронизирующего блока и нереверсивного выключателя и выход реверсивного выключателя соединены с обмоткой статора асин хронного двигателя, первый вход ре- версивного выключателя подключен к сети и ко второму входу синхронизирующего блока, выход которого соединен с одним из входов формирователя алгоритмов управления, четыре других входа которого соединены с четырьмя выходами преобразователя аналог-код, вход последнего связан с выходом тахометра и первым входом блока сравнения, выход которого лодключен к первому входу суммирующего усилителя, вторым входом соединенного через преобразователь код-аналог с четвертым выходом формирователя алгоритмов управления, третий выход которого соединен со вторым входом нереверсивного выключателя, второй и первый выходы соединены с третьим и BTOpftJM входанш реверсивного шлключателя, а пятый формирователя алгоритмов управления связан со входом реверсора и первым входом переключателя-ограничителя, второй и третий входы которого соединены с первым и вторым выходами суммирующего усилителя, а выходы переключателя-ограничителя и реверсора соединены с первым и вторым входами тиристорного преобразователя. Источники информации, принятые во внимание при экспертизе 1.Булгаков А.А,, Частотное управление асинхронными электродвигатепями, М., Наука, 1966. 2.Патент США 3б11032,кл.318-187, 1973.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1984 |
|
SU1197032A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Способ управления асинхронновентильным каскадом | 1975 |
|
SU604115A1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ С РЕГУЛИРУЕМЫМ ЗАКОНОМ КОЛЕБАНИЙ | 1993 |
|
RU2072621C1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Электропривод переменного тока | 1986 |
|
SU1334342A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| Цифровой измеритель скорости вращения асинхронного электродвигателя | 1976 |
|
SU632956A1 |
Фиа
ш
fua.S
0W3.
